
Programming our New Robot
Tags: software, control, Tips, and ThinkPersonhours: 4
Task: Program our new mecanum wheel driving platform
Now that our new robot has been built with a mecanum wheel platform, we can start write our drive code and figure out how to make our robot preform three basic motions: forwards and backwards, side-to-side and to rotate. We decided that, in order to get the best understanding of our robot, how it moves and our code, that we would try to write our drive code through trial and error. However, we did reference some guides written by other various FTC and FRC teams if we got stuck on something and needed to figure out where to start in solving the problem.
Reflections
In order to drive our mecanum wheels properly, we need to first discuss how each wheel is placed on the robot, and also how each wheel needs to move in respect to the others in order move in a certain direction. Each wheel has small rollers that point 45 degrees off of the larger wheel itself. In order to properly set up mecanum wheels, the rollers on each wheel have to point towards the center of the robot.
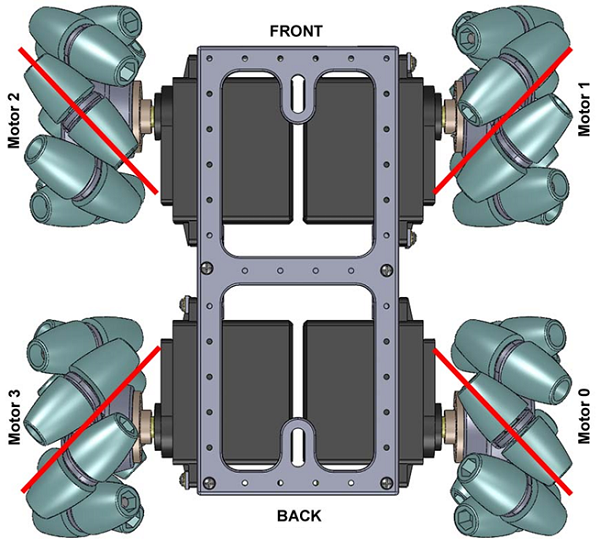 This is important, because if these wheels are not pointing in the proper direction, then the rollers will begin to fight against each other, causing strange driving patterns that aren't very useful. We learned this the hard way, because when reconstructing the wheel mounts, the positions of two wheels on robot were flipped, causing the robot to drive in circles when we tried to drive sideways.
This is important, because if these wheels are not pointing in the proper direction, then the rollers will begin to fight against each other, causing strange driving patterns that aren't very useful. We learned this the hard way, because when reconstructing the wheel mounts, the positions of two wheels on robot were flipped, causing the robot to drive in circles when we tried to drive sideways.
The main reason we decided to go with mecanum wheels is because they open so many different ways to navigate the field. Robots that properly use mecanum wheels can not only go forwards, backwards and turn, but they can also make a robot move side to side. These three types of movement can be mixed with each other to do even cooler things like move in diagonals or even strafe, which is when a robot moves in an arc while moving sideways. Of course, we cannot use mecanum wheels to their full potential if we do not first understand the first three basic types of movement. Driving forwards and backwards is pretty simple, and it's the same as any other robot; all of the wheels have to move in the same direction. Turning also remains unchanged from other platforms; the left side of the robot has to move one way, and the right side of the robot has to move the other.
 However, moving side to side is not really intuitive compared to the others. In order to move side to side, the wheels on either side have to move opposite of each other. For example, if I wanted to, from a top-down perspective, drive to the right, the wheels on the left side of the robot would have to drive away from each other, while the wheels on the right side of the robot would have to drive towards each other. The rollers start spinning away from the center and to the right on the left side of the robot, or towards the center and to the right for the right side of the robot. The forwards and backwards components of the wheels and the rollers cancel each other out, and the robot moves to the right.
However, moving side to side is not really intuitive compared to the others. In order to move side to side, the wheels on either side have to move opposite of each other. For example, if I wanted to, from a top-down perspective, drive to the right, the wheels on the left side of the robot would have to drive away from each other, while the wheels on the right side of the robot would have to drive towards each other. The rollers start spinning away from the center and to the right on the left side of the robot, or towards the center and to the right for the right side of the robot. The forwards and backwards components of the wheels and the rollers cancel each other out, and the robot moves to the right.