
Designing Button Pusher
Tags: mechanical, Think, and DesignPersonhours: 2
Task: Design potential beacon scoring mechanism
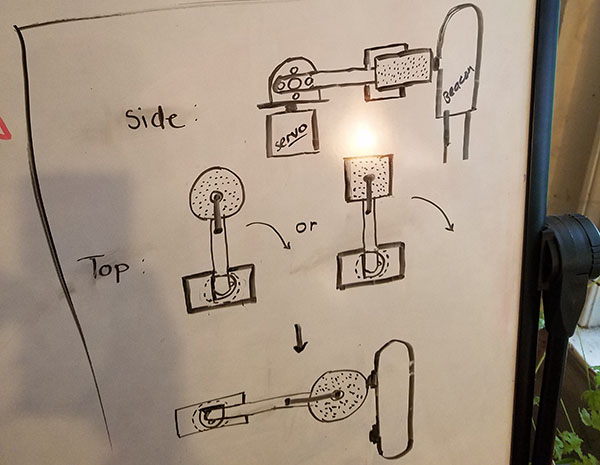
Up to this point, we hadn't given much attention to a beacon scoring mechanism that we could use in both autonomous and tele-op. At the scrimmage we learned that scoring the beacons was almost vital to winning the match, and we couldn't do that. We rigged up a short u-channel on a plate and attached it to our robot, hoping we could just ram into the wall and it would work. It didn't. We started designing potential button pushers. We figured a servo would have enough power and saw a few robots using either a large flat plate or some type of wheel to score the beacons. We thought that a hard-foam wheel would work best, but aren't entirely sure how we would mount it with our limited space, so we'll have to see what best fits our needs and capabilities.
Reflections
Whatever our solution is for this problem, with our first qualifier really soon, we have to come up with it quickly. We realize that if we plan to be a contender for the top seed, we need to be a consistent beacon scorer.