
Mapping Out Autonomous
Tags: Mechanical, Design, and ControlPersonhours: 15
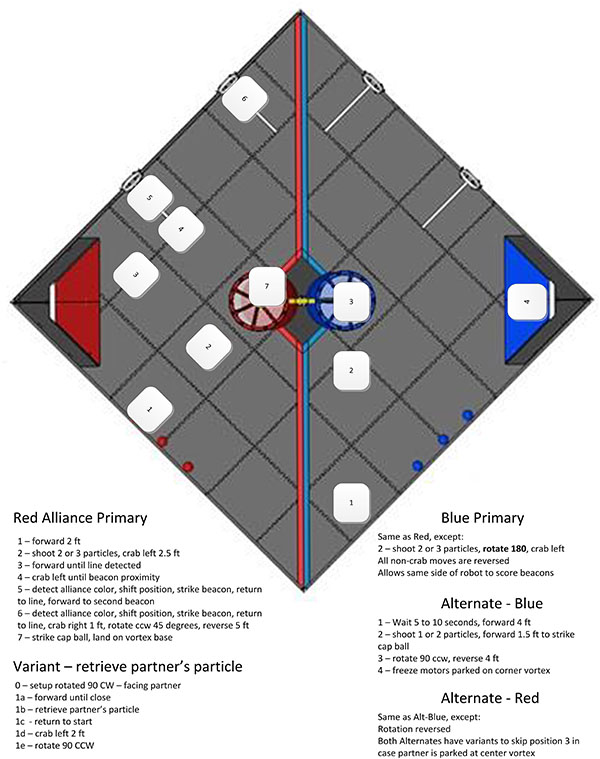
Task: Mapping Out Autonomous

To tell the robot how far to move forward we had to calculate our motors RPM. We did this by telling the robot move to 10 rotations forward and calculating how far it travelled. After he RPM we created a model field upon which we designed a set path for the robot during autonomous. One path for red and then one for blue. Both of these paths allowed the robot to shoot two balls and then push the beacon buttons.After testing this we realised that our alliance partner may be better or worse than us at shooting the balls. So we created a method that allowed us to push a,b, or x to change the number of times the catapult fired.
Reflections
We are constantly working to improve the design our Autonomous. Before this, while our autonomous may have worked. It didn't allow us to collaborate with our alliances to create the best path, stopping us from earning the most points possible. Now with these changes we can work together with our alliance partners to complement each others strengths and weaknesses, helping us earn more points. This will also encourage us to scout around and interact with other teams before and in-between the matches, letting us create a even more detailed scouting sheet.