
Gripper Construction
Tags: engineering, innovate, and thinkPersonhours: 2
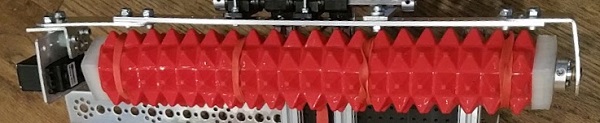
Task: Making the Gripper
Standard parts were used to create the backbone. Then, we bent some tetrix parts to connect the backbone to the servos.
We used continuous rotation cervos to solve the issue mentioned earlier.
This was a fairly easy build but we still have a ways to go before V2 is completed.
This gripper will be far superior to our prior designs in that it will be lighter, as we are substituting wood and rubber for metal parts, which will solve our string breakage issue. As well, we will be able to grasp objects more securely, due to the rubber's larger coefficient of friction and that the gripper arms themselves have more surface area than our original design. Finally, our gripper will be more dependable due to slightly better wire organization than before.
This helps our strategy in that it will be far easier to pick up individual blocks, and helps us achieve our goal of grabbing multiple blocks at once. The wider gripper arms will make it so that we can stack blocks on top of each other before bringing them to the CryptoBox, which makes our robot 1.5x as fast in operating time.