
The Grabber V. Kraken
Tags: think, innovate, and mechanicalPersonhours: 16
Task: Build a new version of the grabber
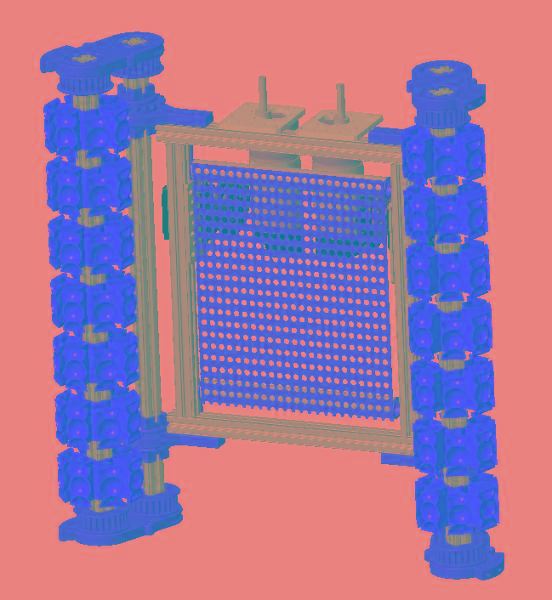
One of our issues with the previous iteration of the gripper was the fact that the material that coated the actual pincers weren't even and would often lead to blocks slipping from the bottom of the gripper and falling out. Our solution to this was to retest materials and in this process we decided to try our hand at 3D printing a circular and pliable material that could be part of our new rotating pincers. We designed the OCTOPUCKERS and built the rest of the grabber around that. Because the octopuckers were designed to slide onto typical rev-rail extrusions we also had to design a new system of bearings that could house the rails with skewered octopuckers.
We developed a “revolutionary” new 3D printed rev-rail bearing system that was liked with a series of chains and pulleys that could be attached to our current lift system and not severely alter the base and drive train. Previously the grabber was actuated via a system of servos controlled by a rev hub back on the main drive train, however in this newer iteration of the grabber, we decided that all of the necessary wiring would be kept inside the grabber to eliminate tangling by mounting the rev hub on the back of the grabber. While this grabber was a major upgrade that drastically improved our glyph handling capabilities, it did in fact double the weight that our lift had to bear.