
Autonomous Updates, Multiglyph Part 2
Tags: control and softwarePersonhours: 8
Task: Develop multiglyph for far Stone
We had a functional autonomous for the balacing stone close to the audience. However, chances are that our alliance partner would want that same stone since they could get more glyphs during autonomous. This meant that we needed a multiglyph autonomous for the far balancing stone. We went on an adventure to make this happen.
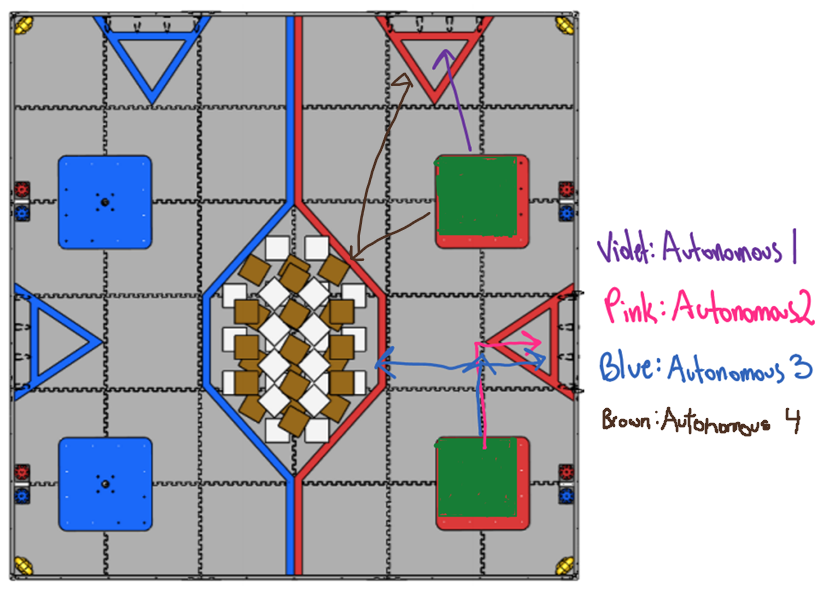
We programmed the robot to drive off the balancing stone and deploy the grippers as this occurred. To ensure the robot was off the stone before deploy, we utilized the roll sensor in the REV hub to determine whether the angle the robot was at was flat on the ground. This made our autonomous account for the error we could have on the balancing stone in terms of placement in the forward backward direction respective to the field. Next, we used an IMU turn into the glyph pit to increase our chances of picking up a second glyph. Then, we backed away and turned parallel to the cryptobox. The following motion was to travel to the field perimeter for a long period of time so that the robot will be pushing the field perimeter. This was done to correct any wrong angles and make grippers perpendicular to field wall. Then the robot backs up and scores the glyphs. Here is a video of it working:
Next Steps
Now we are speeding auto up and correcting IMU angles.