Garchomp Presentation
Tags: motivate, connect, think, and designPersonhours: 4
Task: Present in the Inviational Presentation Series
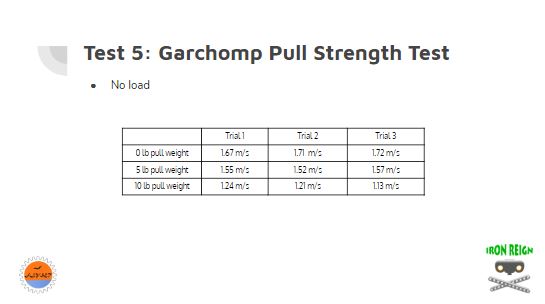
Today, we participated in the Chassis Presentation workshop for teams all around the North Texas region; the project was to design robots and perform various tests with them, then present findings. We presented our chassis, Garchomp, a mechanum wheel chassis as can be seen in the slide photos below.
Presentation

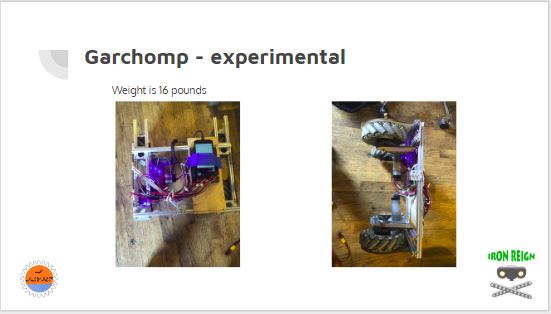
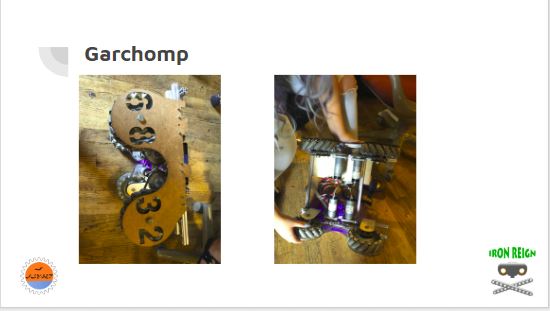
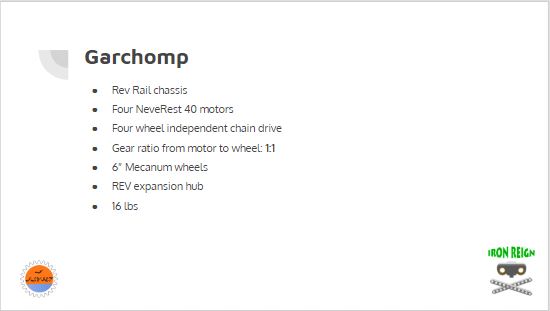
To create our chassis we used 4 never rest 40 motors one for each wheel and the structure of the chassis was created by using tetrix rails. We connected the wheels to the motors by using a 1:1 gear ratio. While there are many benefits to using a gear ratio for your wheels be forewarned that if your wheels are not perfectly aligned attaching your chains to mechanum wheels will become a living nightmare as can be seen in our previous posts.
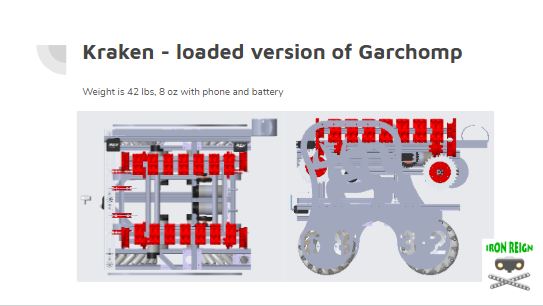
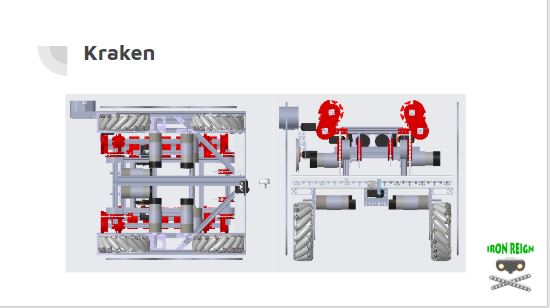
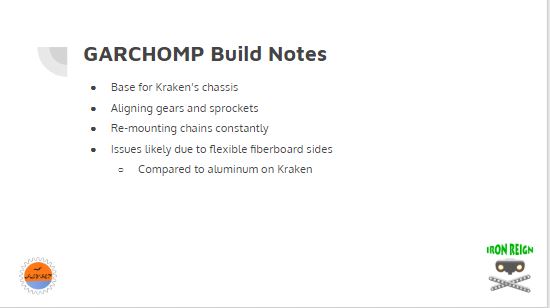
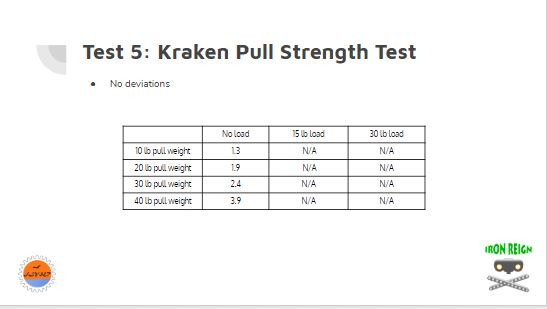
One of the reasons that attaching the chains was so difficult for us was because we discovered that because we had used wooden sides instead of the aluminum sides that Kraken used our wheels became misaligned to the two different types of wood used for the sides.
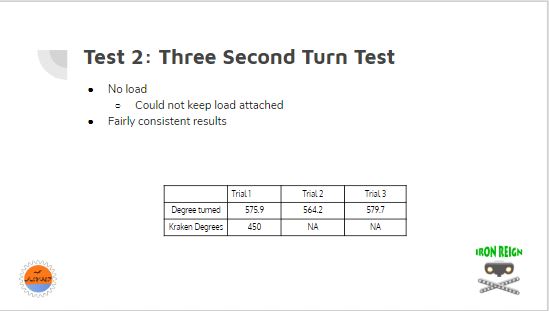
While our robot is not able to do a 360 degree turn as fast as some other robots presented today it is able to hold a considerable amount of speed while moving at a constant speed.
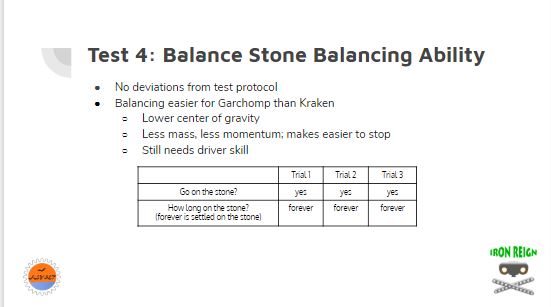
Since this chassis was designed for last years competition it is able to consistently drive onto the balancing stone