
Meeting Log
Tags: organization and thinkPersonhours: 32
Meeting Log September 22, 2018

Today's Meet Objectives
As we are starting to make more serious strides in our robot and strategy, we wish to start passing down knowledge to our new recruits. Today, we are going to continue prototyping with grabbers and various linear slide kits and we need to discuss strategy and organization for this season.
Today's Meet Log
- Robot strategy discussion Today we have discussed more about what we want our strategy to look like. An option we are heavily considering is having a non-moving robot, in the sense that our robot is stationary and all game actions are performed using extensions from the robot, using linear slides, etc. We have discussed what game rules we need to consider, like what "parking" consists of during autonomous. For further information, see (E-34, Another Design Bites the Dust).
- Chassis brainstorming We discussed the chassis design we plan to use this season, and we decided experiment with the BigWheel chassis we build this summer. For more details on this discussion, see (E-23, Chassis Brainstorming).
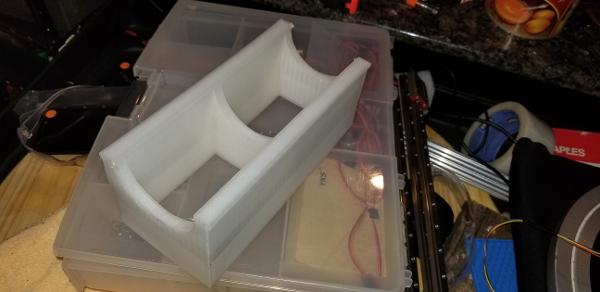
- Sorter prototyping We have continued prototyping various grabbing mechanisms with sorting ability, one passive and one active sorter. The passive version we modeled in Creo and printed before practice, and the active was modeled using Legos! Our new recruits have been helping us prototype also, as we have been making a version 2 for the active model.
- New chop saw! Some of the materials we are working with require power tools that we don't have or were damaged by rain. One of the linear slide kits we are working with is stainless steel, which requires a chop saw which we didn't have. We made a trip to Home Depot and bought one.
- Finishing field assembly Our new recruits finished up the field today. They ran into some problems along the way, including difficulty with putting on the top part of the lander, improper placement of the wing nuts, alignment of the lander in the foam tiles, and more but were able to overcome these difficulties and yielding a field for practice.
- Linear slide assembly
- Team marker Karina narrowed down the ideas for a marker and she, with Kenna, has began building it. More about our marker can be found at (E-33, Team Marker Fun).
- Open CV and our CNN While we are waiting to begin code, we are testing many algorithms in Open CV, so we can accurately and consistently detect field minerals. These algorithms consider shape and color to map points to predict the location of the minerals. While developing Open CV, we have begun the development of a Convolutional Neural Network. Detail of our CNN training can be found at (E-22, CNN Training).
- Location sensor Today, Justin worked on making the location sensor (our fail-safe in case our encoders fail) smaller and more lightweight to help us meet with this year's size requirements (something we have had trouble with in the past).
- Chassis testing We tested the different chassis we build this summer on the field to see how they interact with the terrain (aka the crater). We found that Big Wheel was too long and didn't go over the crater at all unless it was backwards and got a running start. Garchomp (with Mechanums) went over the craters fine.
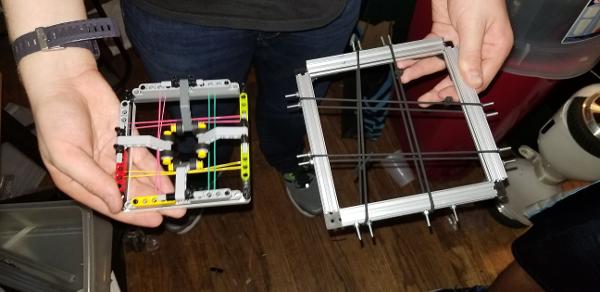

Evan and Janavi finished assembling the linear slides they were working on last week. As we build a chassis (or a wheel-less chassis) we are going to try both types to see how the weight, strength, friction, string tension, and other factors affect our gameplay. A side-by-side comparison of our linear slides cam be found at (E-61, Selecting Linear Slides)

Today's Member Work Log
| Team Members | Task | Start Time | Duration |
| Karina | Robot build and team marker design | 2:00 | 4 hrs |
| Abhi | Open CV and build | 2:00 | 4 hrs |
| Evan | Build | 2:00 | 4 hrs |
| Charlotte | Blog and brainstorming | 2:00 | 4 hrs |
| Ethan | Working on blog | 2:00 | 4 hrs |
| Kenna | Robot build | 2:00 | 4 hrs |
| Justin | Build and field assembly | 2:00 | 4 hrs |
| Janavi | Build | 2:00 | 4 hrs |
| Arjun | Code and blog | 2:00 | 4 hrs |
Date | September 22, 2018