
Hanging Hook Prototype
Tags: design and thinkPersonhours: 4
Task: Design a hook for pulling the robot on the lander
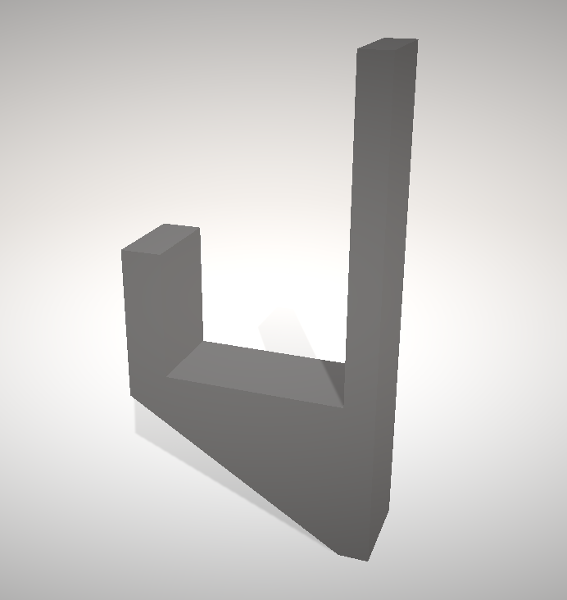
To get a head-start on latching and delatching from the lander during autonomous, we got a head start and made some hook prototypes. If your robot can just do these two things, you can score 80 points. When making this hook, it needs to be modular enough to not require much accuracy but also needs to be strong enough to hold 42 pounds. This hook works just that way.
We designed this hook to have a slanted top to glide the robot into position if we aren't in the right place, making it very modular. In addition, we 3D printed this hook with ~80% infill in nylon after designing in PTC Creo. First, we tested it by hanging ~20 lbs of material off of it for one minute. This worked, but a little too well. While the nylon piece remained undamaged, the metal bracket it was supported by bent at a ninety degree angle. So, we had to pursue further testing.
For our next test, we plan to hang a mass outside for a week. Dallas weather has been extreme lately, with a lot of rain, humidity, and heat. This will be the ultimate stress test; if one of our pieces can survive the outdoors, it can survive just about anything.
Next Steps
We're probably going to have to reprint this to be a bit more fitting for our robot, but its a good start and it works great so far.