
Designing Wheel Mounts
Tags: design, think, and mechanicalPersonhours: 2
Task: Create wheel mounts for our Mini-Mecanum chassis
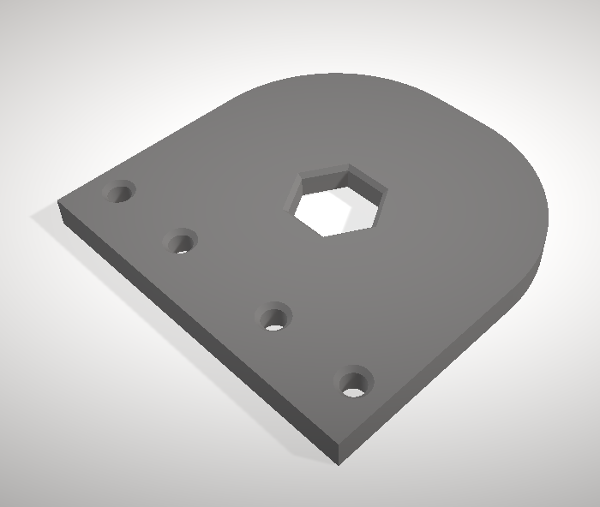
Today, we modeled two possible designs for mini-mecanum wheel mounts. The purpose of the mounts is to hold a churro or hex shaft in place to mount mecanum wheels to. The first design was a 6cm by 6cm square with rounded edges that was 5mm thick. A hexagon was removed from the center to hold the churro that supports the mecanum wheel. This design, when printed on low infill, allowed the churro to rotate when enough force was applied. We modeled this design off of the wheel mounts on Kraken and Garchomp; the only differences are the size and material. Because we will be 3D printing these mounts, material efficiency is very important. This mount design used a lot of material to make a prototype, meaning a finished stable mount would need even more material to prevent the churro or hex shaft from slipping.
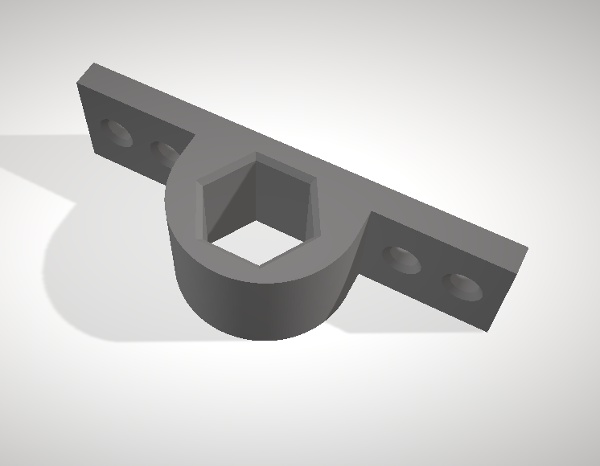
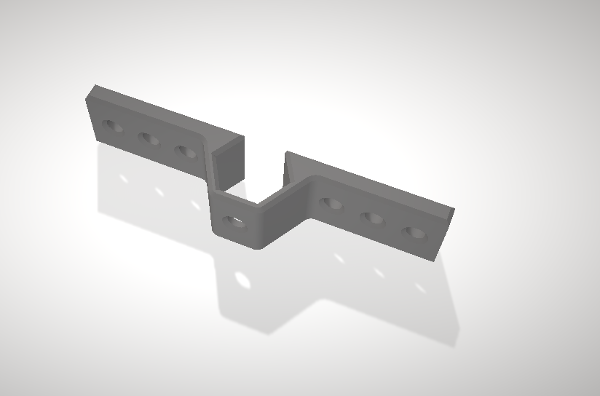
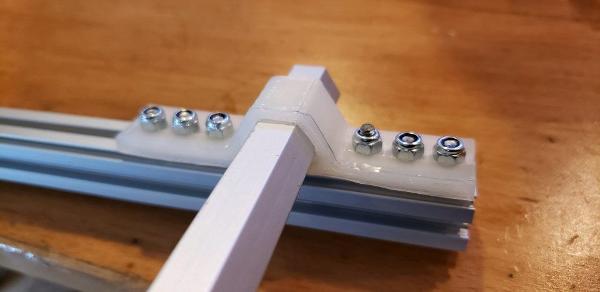
Taking these problems into account, we designed a different way to mount the wheels. The new version can mount underneath a REV Rail and hold the shaft or churro perpendicular to the rail. This design uses much less infill than the previous one because of how small the mount is, and because the REV Rail also acts as support to prevent the churro or shaft from spinning. The mount also allows the mini-mecanum wheels to be mounted as close to the frame as possible, which can help make the robot more compact. This design will allow us to easily mount mini-mecanums to our frame, while using minimal filament and taking up very little space.
Next Steps
We need to build the full mini-mecanum robot to judge whether these designs will fully work.