
BigWheel+
Tags: think, design, and innovatePersonhours: 4
Task: Continue work on BigWheel

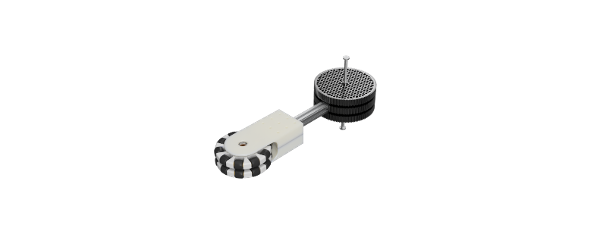
BigWheel has gone through a few major changes. First and foremost, it now has a flipper arm, AKA Superman. Since the robot itself is the lift mechanism, we had to put a lot of work into Superman's design. Right now it is a 10 inch REV rail attached to two 125-tooth gears for redundancy, with a custom 3D printed mount housing an pair of omniwheels on the other end. On the motors, we have two 15-tooth gears, resulting in a 3:25 gear ratio. This gives us a ridiculous amount of torque that lifts the robot up smoothly. On top of the flipper, we’ve added extra supports on the arm mounts, as when we went to the Hendricks scrimmage, we found that the two sides were out of alignment, and one was bending more forward than the other, making the arm bend unevenly to one side and throwing the whole robot out of alignment.
The next step is to strengthen the arm itself, as the two sides have a tendency to want to do their own things, mainly the side with the intake motor mounted to it. Since the supports have been put in though, Bigwheel has been functioning much better, and the arm no longer flops to one side. General wire management has also taken place, as we'd dealt with wires getting stuck in the gears.
Next Steps
Bigwheel was built on a bit of a shabby base, mostly being made of a piece of polycarb and some aluminum bars, and not giving much in terms of change. We’ve cut here and there, drilled a few holes, unattached and re-attached a couple of things, but in all it’s a very stiff robot, and doesn’t lend itself to fluidity of design. That’s why we plan on making a second version of this base, hopefully with thinner polycarb and more secure sides that have been welded together but can be removed more easily. The exact design is still being modeled, but we have a direction to jump off from, and I believe we can make that leap to a better robot.