
Off-Schedule Meeting Log, Winter Edition
Tags: think and organizationPersonhours: 8
Meeting Log (Week of)January 03, 2019
We have quite a few tasks this week, including:
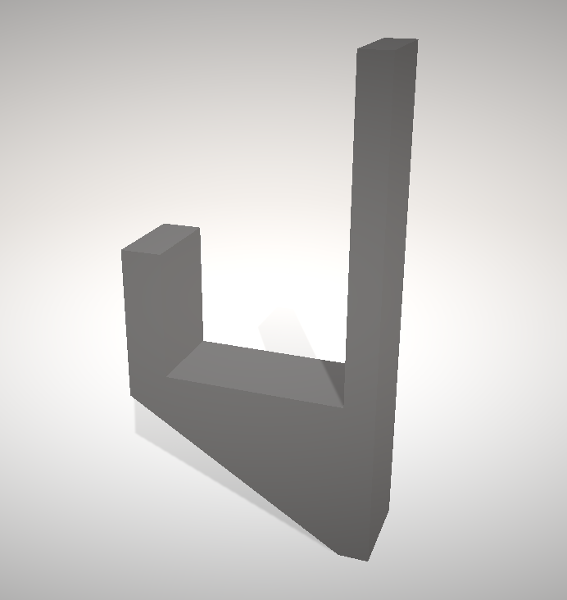
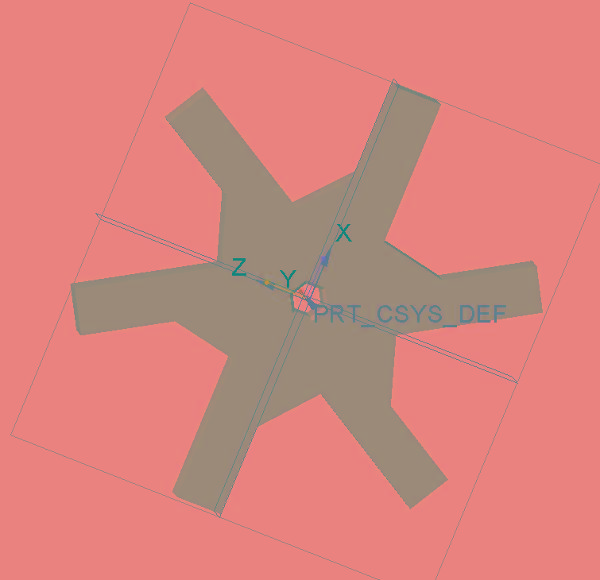
- Latch design We've had an idea for a latch for a while. We started with the simple hook pictured below, but it was just that, a start. We want to move on to bigger and better things. So, we designed a new version, displayed below the hook.
- Latch attachment So, just having a design isn't enough, it actually has to be implemented. So, Evan cut some attachment points that also function as linear slide stoppers as detailed in our last post.
- Fixing superman and wheels While Karina was testing our robot, BigWheel suddenly began to lose friction, stranding itself in the middle of the field. It would only operate if more weight was put upon it. We haven't determined the reason yet; it could be that the temperature caused some strange material effect, but the new linear slides could also have shifted the weight distribution of the robot away from the main wheels. In addition, the Superman arm failed to work. We've narrowed it down to a code issue, but beyond that, we're scratching our heads.
- End\Beginning of year review Iron Reign has a tradition of reviewing the performance of the past year; this year I chose to begin it using numbers. I went back in the archives and used the stats page to count contributions from team members. This post can be found here.
- TensorFlow & OpenCV testing We still need to fully implement gold/silver particle detection, as well as the rest of our autonomous. To begin on this long, arduous process, Abhi and Arjun worked from home to begin vision integration. At the current point, the program detects gold most of the time. We are experiencing a bug in that the telemetry isn't detected.


Date | January 3, 2019