
Latch Updates
Tags: innovate, design, and thinkPersonhours: 12
Task: Update the latch
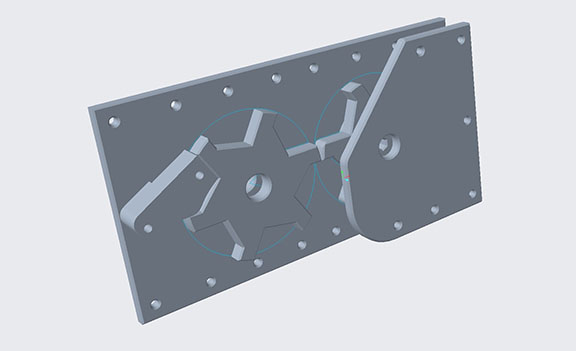
Our first attempt at a latch was made out of flat metal L brackets that would slide into the hook, but they slid off under any stress. We decided to make a latch with a ratchet and sprocket system. The easiest way to accomplish this was to 3d print it. There are two sprockets and the lander hook will slide in between them. This causes the sprockets to rotate and then lock, allowing the latch to support the weight of the robot. To disengage, the driver just needs to move the ratchet up and over the hook. The picture of the model shows our change in design because the right sprocket is mounted to a bearing in mount, while the left side has the bearing in the sprocket.
The purpose of our new latch is to increase the speed of latching. The latch requires one direction of motion to fully engage it, making it perfect for autonomous. The latch also has room for error because the funnel shape of the fron plates guides the hook into the sprockets.
Issues
Next Steps
We need to either strengthen our current design or find a better alternative.