
Elbow Rebuild
Tags: think, design, and innovatePersonhours: 6
Task: Rebuild the elbow after total gear annihilation
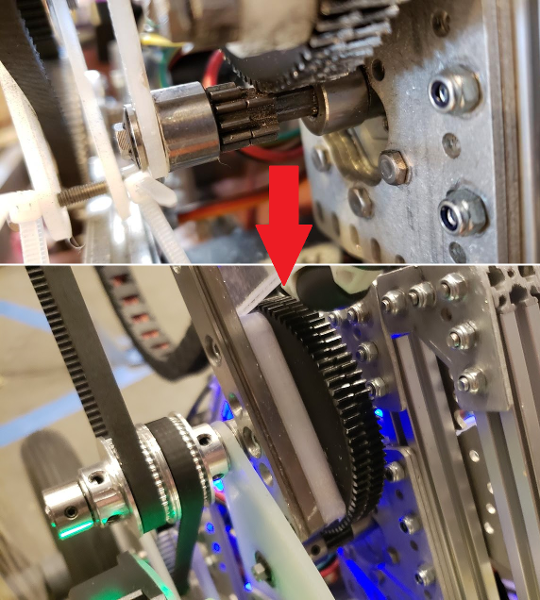
In a previous post, we detailed the extent to which we had stripped our gears - they were missing teeth in several places and the black anodization layer had completely stripped away. So, we had to replace them. The first order of action was to design gearkeepers for them. We've designed gearkeepers before, for the Superman arm, but these have different requirements. They must connect the gears on both elbow driver and slave, but also must mount to the robot itself to prevent the motor shaft from wobbling, which had previously caused major issues. We came up with this design, printing it out in 60% infill nylon.
The next thing to do was replace the actual gears. To do so, we had to dismantle the entire elbow and replace the gears and shaft collars. This alone took about two hours per side. We added the new gears, ensuring that they were in alignment, and printed a circular part to mount the top of the gears to the linear slide so that the entire system would rotate when the gears were turned. Then, we remounted the belts and aligned them. After, we attached the new gearkeepers, ensuring that the gears interlocked perfectly.
Next Steps
So far, we haven't experienced issues with the new elbow, but we're getting our hands on a new set of gears to be safe. We expect this system to continue to work for the Regional tournament, and are performing drive practice to ensure this.