
Big Wheel Articulations
Tags: Think, Innovate, Control, mechanical, and softwarePersonhours: 24
Task: Summary of all Big Wheel movements
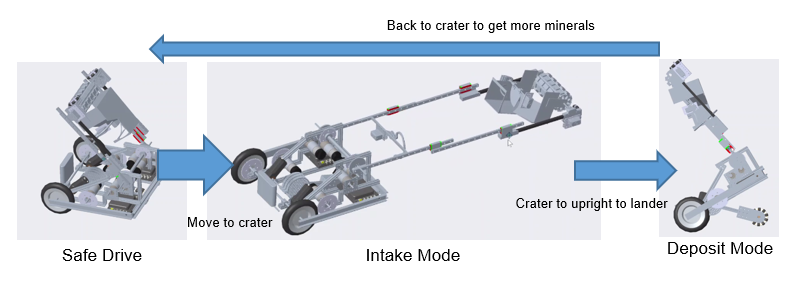
In our motion, our robot shifts multiple major subsystems (the elbow and Superman) that make it difficult to keep the robot from tipping. Therefore, through driver practice, we determined the 5 major deployment modes that would make it easier for the driver to transition from mode to mode. Each articulation is necessary to maintain the robot's center of gravity as its mode of operation shifts.
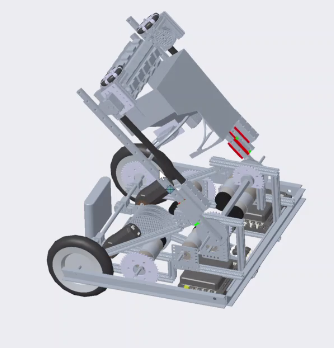
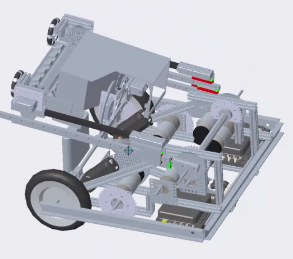
The position seen above is called "safe drive". During normal match play, our drivers can go to this position to navigate the field quickly and with the arm out of the way.
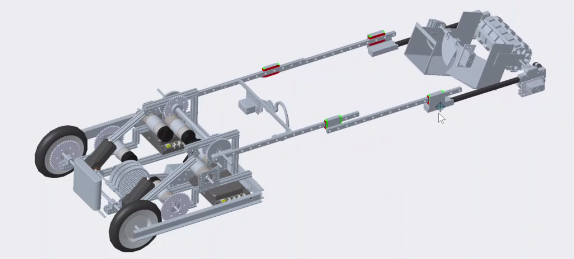
When the driver control period starts, we normally navigate to the crater then enter the intake position shown above. From this position, we can safely pick up minerals from the crater.
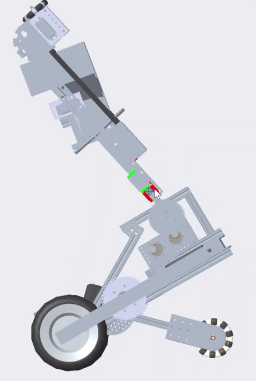
From the intake position, the robot goes to safe drive to fix the weight balance then goes to the deposit position shown above. The arm can still extend upwards above the lander and our automatic sorter can place the minerals appropriately.

During the end game, we enter a latchable position where our hook can easily slide into the latch. After hooked on, our robot can slightly lift itself off the ground to hook.
At the beginning of the match, we can completely close the arm and superman to fit in sizing cube and latch on the lander.
As you can see, there is a lot of articulations that need to work together during the course of the match. By putting this info in a state machine, we can easily toggle between articulations. Refer to our code snippets for more details.
Next Steps
At this point, we have 4 cycles in 1 minute 30 seconds. By adding some upgrades to the articulations using our new distance sensors, we hope to speed this up even more.