
Balancing Robot Updates
Tags: control and thinkPersonhours: 4
Updates on Balancing Robot
Today we managed to get our robot to balance for 30 seconds after spending about an hour tuning the PID gains. We made significant progress, but there is a flaw in our algorithm that needs to be addressed. At the moment, we have a fixed pitch that we want the robot to balance at but due to the weight distribution of the robot, forcing it to balance at some fixed setpoint will not work well and will cause it to continually oscillate around that pitch instead of maintaining it.
To address this issue, there are a number of solutions. As mentioned in the past post, one approach is to use state space control. Though it may present a more accurate approach, it is computationally intensive and is more difficult to implement. Another solution is to set the elbow to run to a vertical angle rather than having that value preset. For this, we would need another IMU sensor on the arm and this also adds another variable to consider in our algorithm.
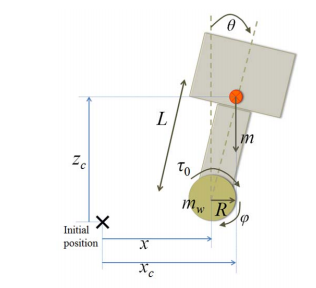
To learn more about this problem, we looked into this paper developed by Harvard and MIT that used Lagrangian mechanics relate the variables combined with state space control. Lagrangian mechanics allows you to represent the physics of the robot in terms of energy rather than Newtonian forces. The main equation, the Lagrangian, is given as follows:

To actually represent the lagrangian in terms of our problem, there is a set of differential equations which can be fed into the state space control equation. For the sake of this post, I will not list it here but refer to the paper given for more info.
Next Steps:
This problem will be on hold until we finish the necessary code for our robot but we have a lot of new information we can use to solve the problem.