
New Elbow
Tags: think, innovate, and designPersonhours: 8
Task: Design an elbow for bigwheel that we can 3d print
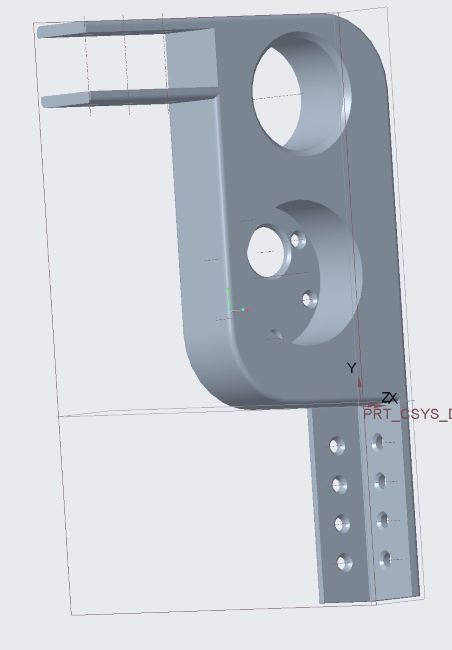
To speed up the build process of the new robot, we made a 3D printable part of the elbow joint. The design simplifies the complex assembly of the elbow mounting point and makes it a single printable part. The old elbow contains many different parts that would need to be spaced precisely in order for the gears to mesh properly, while the new print allows us to stay consistent with our measurements when building the new robot. The part contains motor mounting holes, as well as a socket to support the weight of the motor. There is also a place to put the bearing that the lift system rotates on.
This had to be spaced properly so we calculated the exact distance by using the number of teeth and module of the gear to find the diameter. The part also has two places to attach it to a REV rail, which allows us to secure the elbow to the chassis. The spacing between the bottom REV rail socket and the bearing hole is spaced so that the gear that aligns with the bearing is flush with the front plane of the robot to stay within 18 inches. The new bearing hole is also higher up than the hole on the old robot, which gives us more extension when intaking or depositing minerals.
Next Steps
We need to attach the new mounts and test how the new height of the elbow mounting point affects our balance and latching.