
Icarus Code Support
Tags: control and softwarePersonhours: 1
Task: Implement dual robot code
With the birth of Icarus came a new job for the programmers: supporting both Bigwheel and Icarus. We needed the code to work both ways because new logic could be developed on bigwheel while the builders completed Icarus.
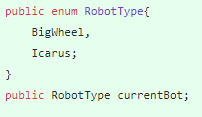
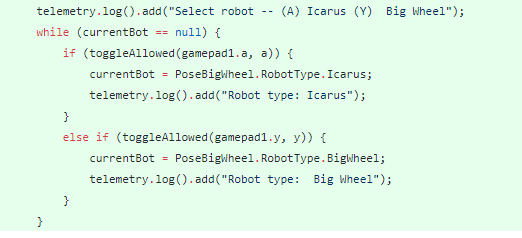
This was done by simply creating an Enum for the robot type and feeding it into PoseBigWheel initialization. This value was fed into all the subsystems so they could be initialized properly. During init, we could now select the robot type and test with it. The change to the init loop is shown below.

Next Steps
After testing, it appears that our logic is functional for now. Coders can now further devlop our base without Icarus.
Date | March 29, 2019