
Reverse Articulations
Tags: innovate, design, control, mechanical, and softwarePersonhours: 8
Task: Summary of Icarus Movements
In post E-116, I showed all the big wheel articulations. As we shifted our robot to Icarus, we decided to change to a new set of articulations as they would work better to maintain the center of gravity of our robot. Once again, we made 5 major deployment modes. Each articulation is necessary to maintain the robot's center of gravity as its mode of operation shifts.
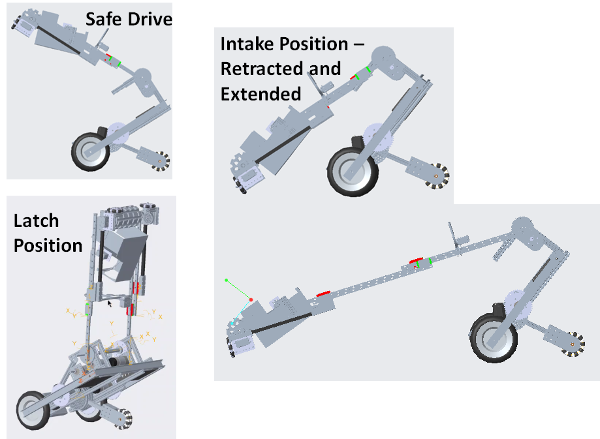
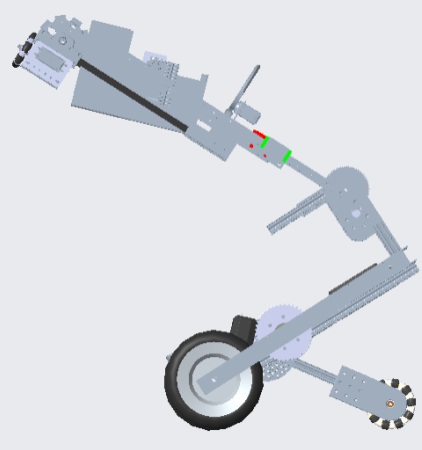
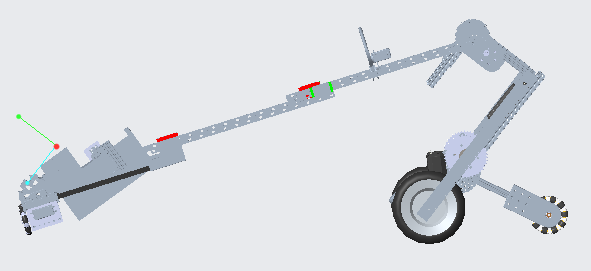
The position seen above is called "safe drive". During normal match play, our drivers can go to this position to navigate the field quickly and with the arm out of the way. In addition, we use this articulation as we approach the lander to deposit.
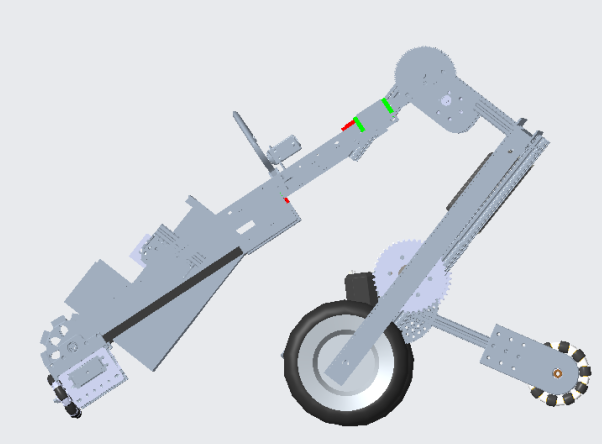
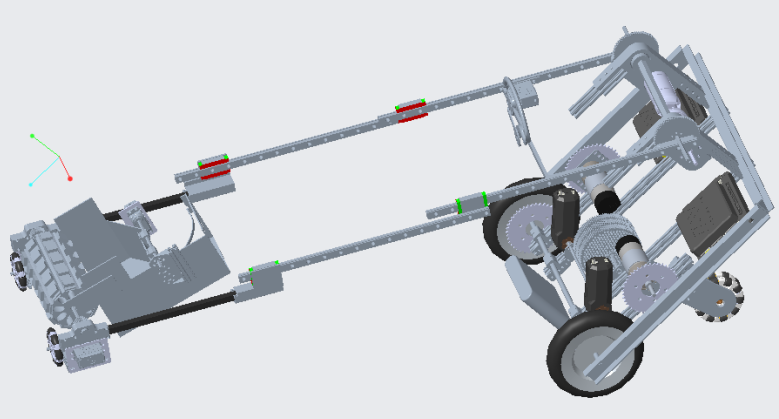
When the driver control period starts, we normally navigate to the crater then enter the intake position shown above. From this position, we can safely pick up minerals from the crater. Note that there are two articulations shown here. These show the intake position both contracted and extended during intake.

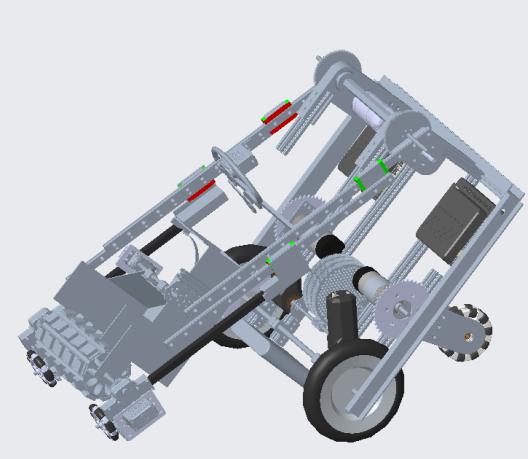
During the end game, we enter a latchable position where our hook can easily slide into the latch. After hooked on, our robot can slightly lift itself off the ground to hook. This is the same articulation as before.
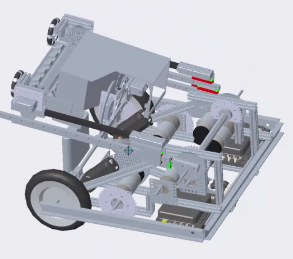
At the beginning of the match, we can completely close the arm and superman to fit in sizing cube and latch on the lander. This is the same articulation as before.
These articulations were integrated into our control loop just as before. This allowed smooth integration
Next Steps
As the final build of Icarus is completed, we can test these articulations and their implications.