
Wheel Gripper
Tags: think, innovate, and designPersonhours: 6
Task: Design an intake for the stones based on wheels
Initial Design: Rolling Intake
The first idea we came up with for gripper designs during our Robot in 2 Days (Ri2D) challenge was a rolling intake with the wheels coming from the top and spinning to intake the stone. Since the wheels needed to spin they were placed on shafts which required two extrusions since the pillow bracket for them needs to be threaded on the ends of them to make this design compact.This design was rejected since we want to use the minimal amount of servos as possible and we came up with a more compact design that requires only one servo instead of two(one for each wheel).
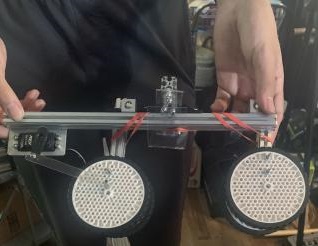
Final Design: Gripper Wheels
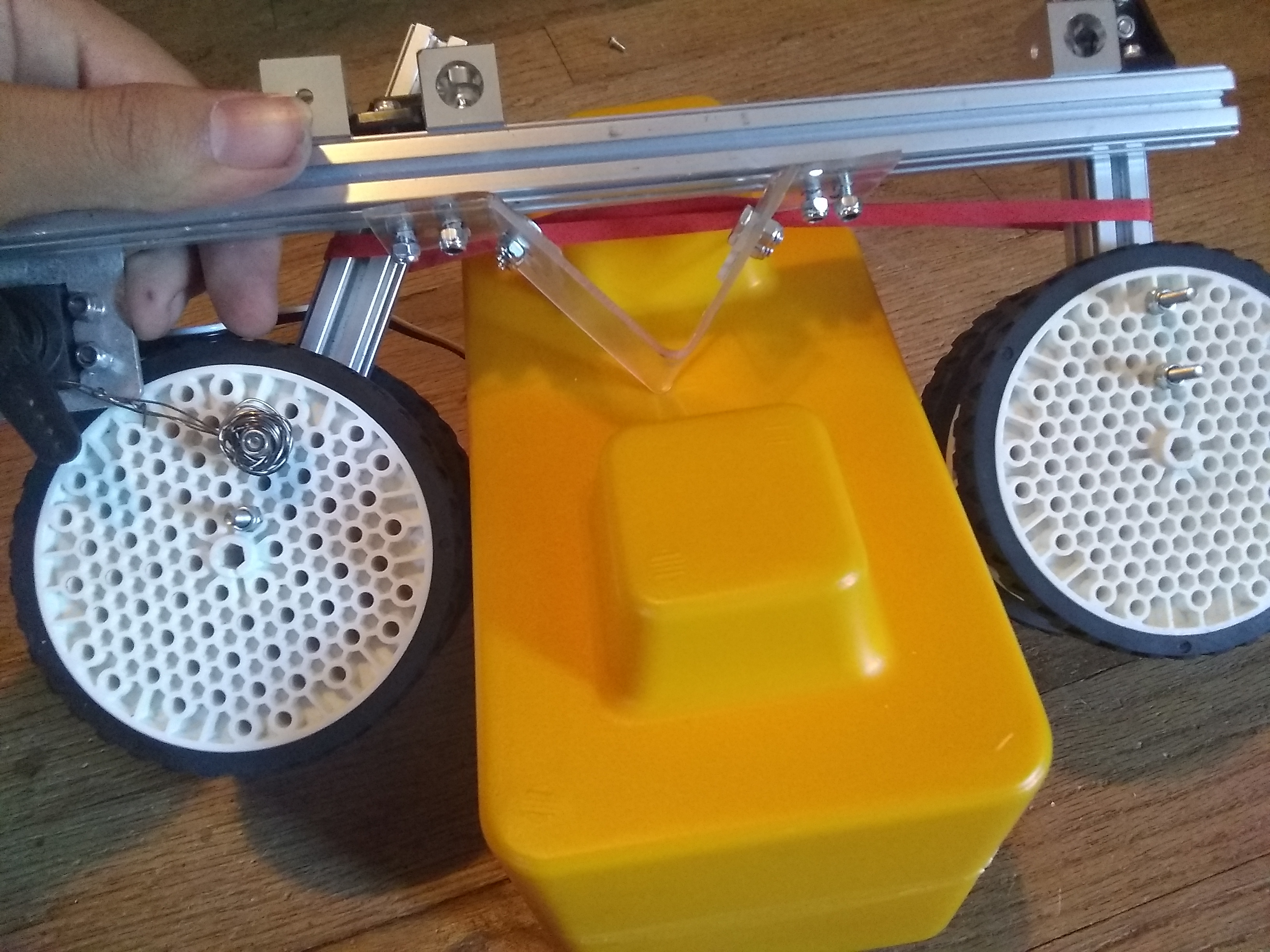
This design involves two wheels attached to extrusions, one is idle and can't pivot while the other can be rotated in place by a servo. Once its grip was tested we saw that the wheels spinning was a problem. To fix this, the wheels where attached directly onto the extrusions this time and to enhance their grip, a rubber band was added to default the wheels' position as closed. A servo was added to the end of the main extrusion with a servo horn and polycarb beam to rotate the non-idle wheel back to release the stone in its grip. Finally, since drivers aren't perfect, a stabilizer made out of polycarb was placed in the middle of the gripper so it will always move towards the middle of the stones, in between the stubs. At first this was off by 90 degrees, but this was fixed shortly after.
Next Steps
We will have to implement this onto the Ri2D bot and run tests to compare this gripper against our others.