
Rack and Pinion Gripper
Tags: innovate, design, and thinkPersonhours: 6
Task: Build a gripper system for the 2019-2020 Skystone Challenge
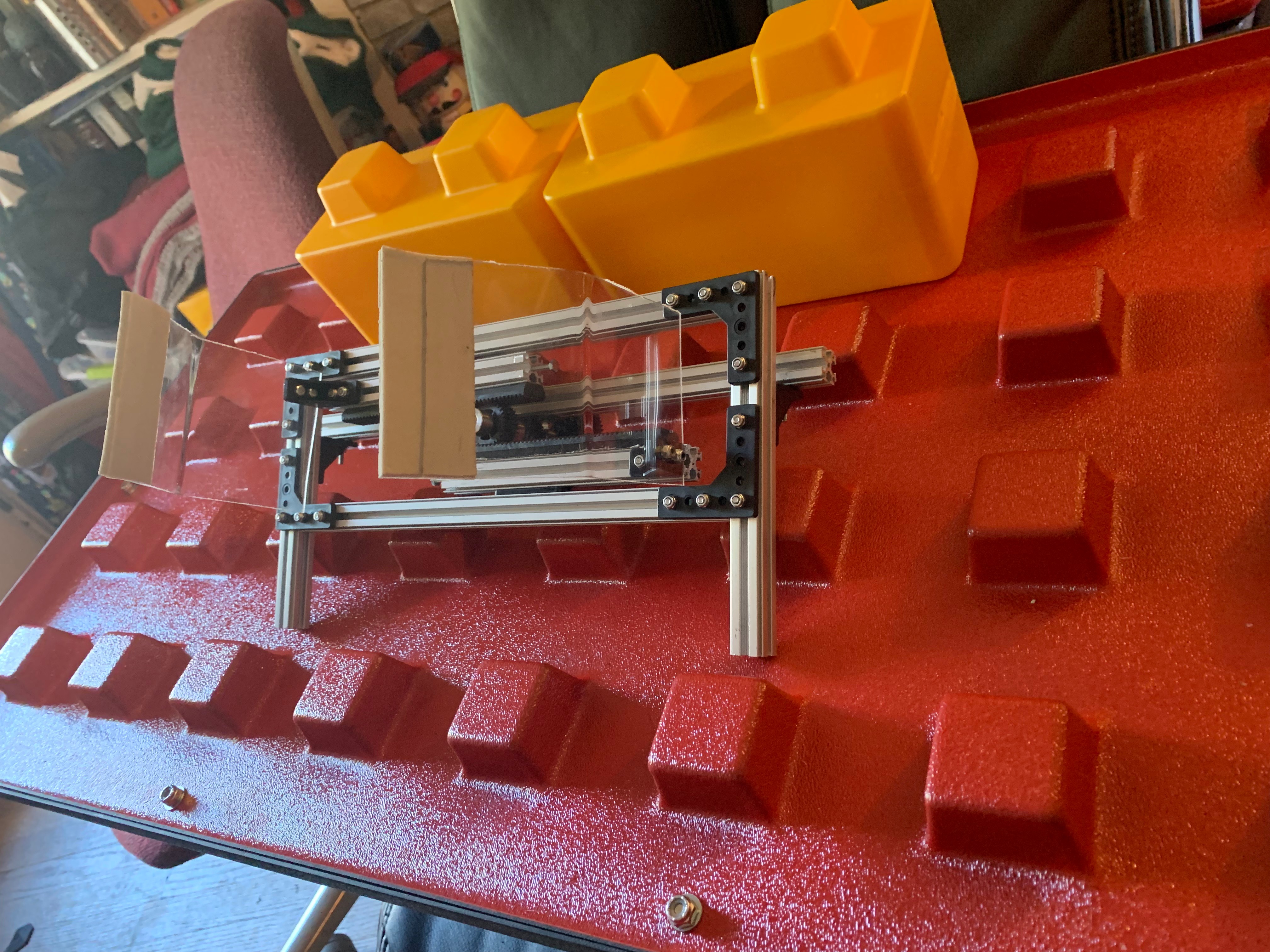
The rack-and-pinion gripper system is one of the 4 gripper systems we built this weekend for our Robot in 2 Days project. Since we’ve never used a rack-and-pinion system before, we realized that it would be a creative idea to start off the new season. Going for simplicity, we made a box such that we could fit 2 racks going in opposite directions, having the pinion in the middle. We constructed the racks with standard rev rails attached to the box with a rev standard linear slide piece and attached tetrix rack gears on the opposite side with double sided tape. Then the pinon was a rev standard gear attached to a rail on the back. The plan was such that when the pinion was turned the two grippers will move outwards and inwards to grasp the stones.
After that, the actual grippers went through 2 iterations. The first was a straight, flat bladed polycarb sheet attached to the rack. We tried this, but it turned out that did not provide enough friction. The second iteration was a slight variation, where we bent the arms and added rubber foam to the end. This saw some success.
Next Steps
Overall, the system was very solid and worked reliably, and could be used in conjunction with a gimbal to make a well performing arm, but that didn't save it. For our weekend build, the rack-and-pinion is too incompatible with our chassis to be implemented in time - but as FrankenDroid (our new robot!) is not the final iteration of our competition robot, the rack-and-pinion gripper system will act as a prototype for any changes we choose to make to our gripper system as the season progresses.