
TomBot CAD
Tags: design and thinkPersonhours: 3
Task: Design a concept for a circular chassis
A challenge we face this year is running into other robots. Last year, it was possible to easily get around other robots; however, this year it will be difficult to get around other robots, as there will be a lot more cross traffic in the building zone.
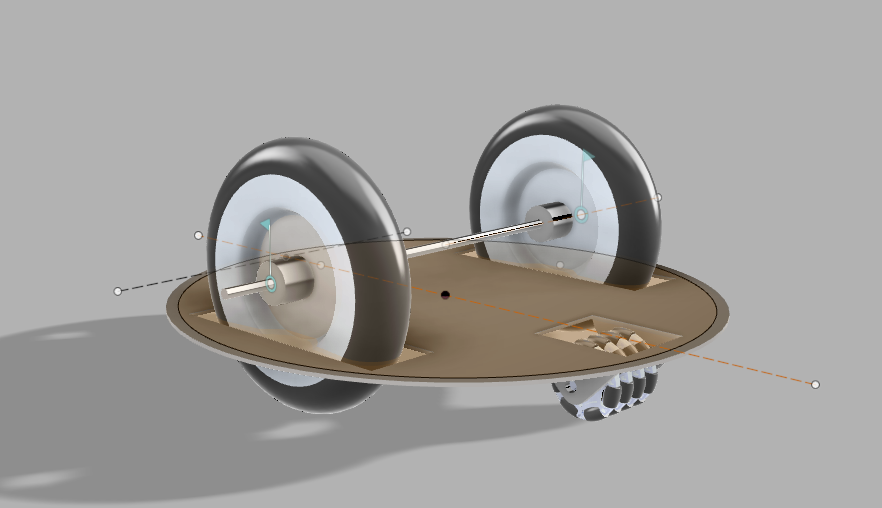
Our solution to this is designing a circular chassis. This will allow us to brush other robots without getting caught. With this, we would be able to move quicker and accurately. We will construct a 17.5in circular chassis. It will be driven by 2 8-in wheels (ironton 8in. Solid Rubber Spoked Poly Wheel) with 2 sets of 4-60mm omni-directional wheels on the front and back of the robot for stabilization.
Next Steps
Our next steps are to begin construction of the circular chassis, which has now been named TomBot, after our coach's cat - Tom the Cat. We will begin construction of TomBot by creating a circular template, which will be 17.5in in diameter. We will then trace that shape onto a polycarbonate sheet and cut it out.