
Gripper Testing
Tags: design and innovatePersonhours: 8
Task: Test block gripper
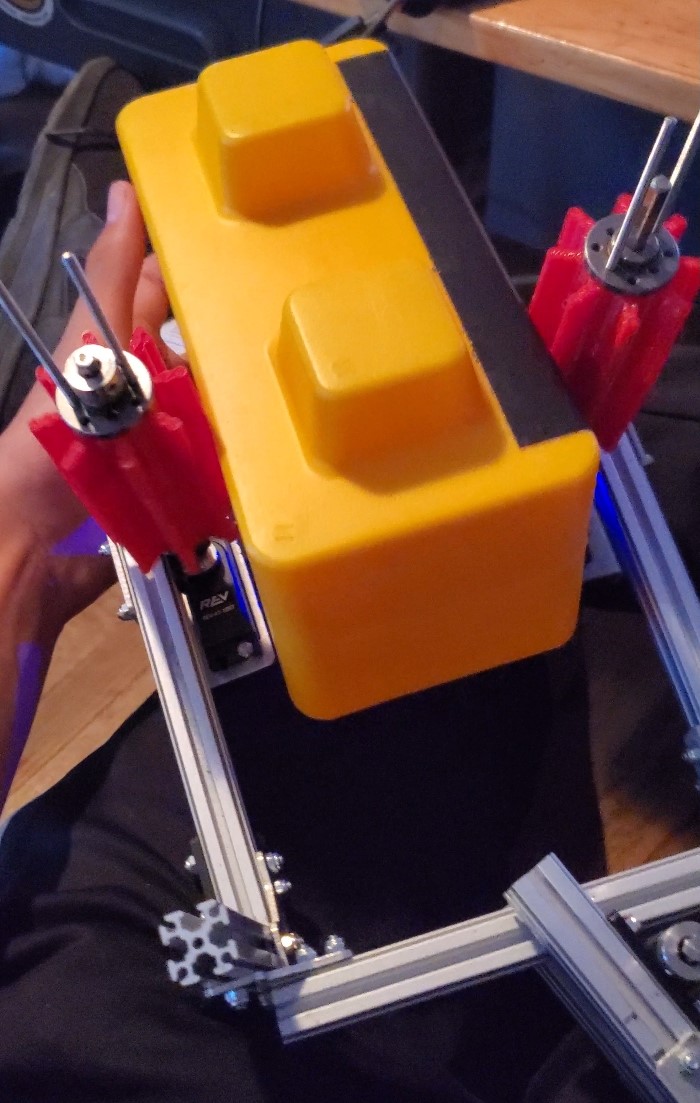
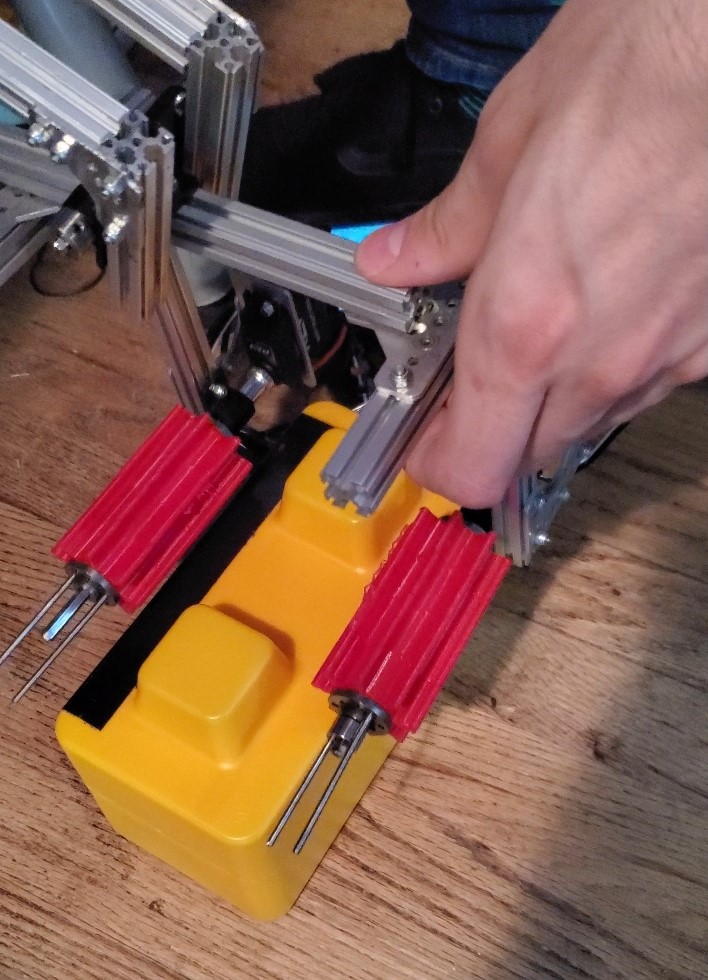
Here is us testing the gripper we designed to pick up the blocks in this years SkyStone challenge. This gripper combines the Pivoting Accelerated User-Friendly Locker, P.A.U.L, one of our earlier gripper designs, and Aaron's Super Cool Gripper, a design from our Robot in 2 Days Challenge. It has a backplate similar to that of P.A.U.L's but instead of polycarb flaps, it utilizes the smaller Ninjaflex gears (a smaller version of the gears on Aaron's Super Cool Gripper) that Justin modeled so it is essentially a combination of our best design ideas so far. It doesn't have a name yet so it will be called P.A.U.L Version 2. It was mostly effective in picking up the blocks, however we need more structural rigidity to ensure that the blocks don't rotate while being picked up.
Next Steps
Next steps include reinforcing the gripper frame, and mounting it to our prototyping robot. We also need to cut off the excess rev rail, to reduce weight and make it a little less bulky.