
3-Fingered Gripper
Tags: design and innovatePersonhours: 6
Task: 3D Model and build an 8th gripper design
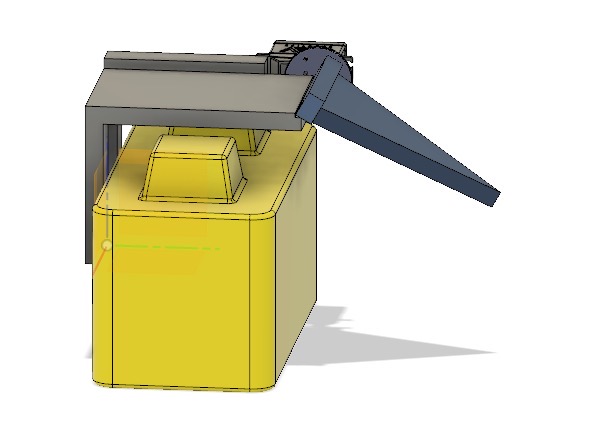
As our 8th gripper design we are trying out a compact design known as the 3-fingered gripper. This was 3-D modeled before being built as a proof of concept. The back of the gripper has two bars to orient the stone before being grabbed. One bar contacts the stone and the other does too as TomBot continues to approach it. The actual grip comes from a plate that can open and close via a servo. Once the design was modeled it proved to seem reliable, especially because of the two bars orienting the stone.
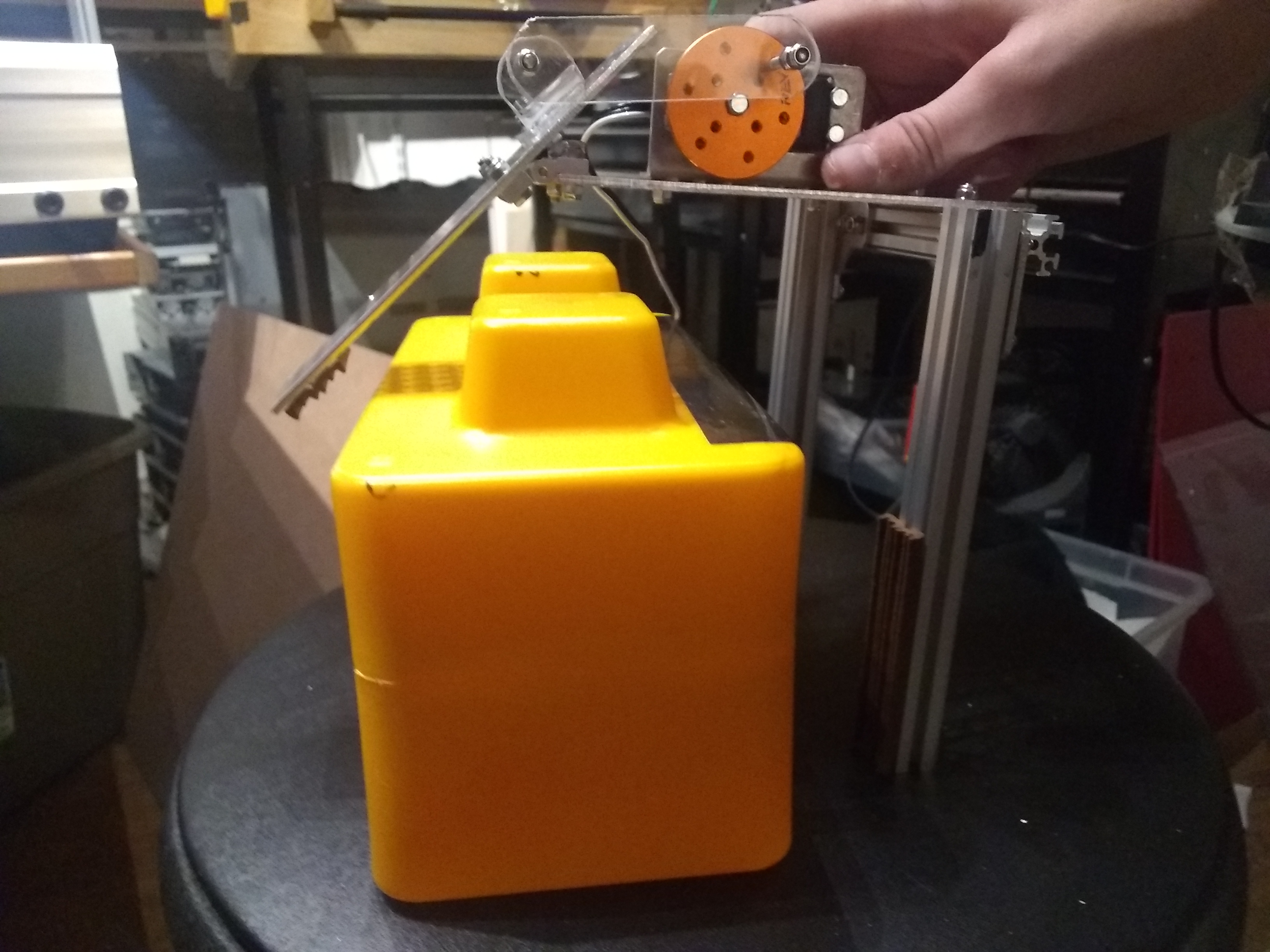
Now for the fun part, actually contructing the gripper. REV extrusions were used for bars at the back since their width is ideal for the job. From here we used GoBilda parts such the plates and a hinge for the rest of the design. Optimizations were made for the attachment of the GoBilda plates since they aren't the exact length needed, and once another plate was attached to the first via a hinge we added a servo. This servo opens and closes the gripper(of course), to do so a polycarbonate bar was used to connect the servo and the hinged plate. Finally, we added grip material to the back bars and the gripping plate. By using a servo tester we were able to test its functionality. Tests proved that grabbing the stone is really easy, but the grip could use work.
Next Steps
Compared to the other gripper designs this one seems to work best so we will optimize it some more add it onto TomBot.