
Finger Gripper Version 3 CAD
Tags: design and innovatePersonhours: 3
Task: Design a more comapct and efficient gripper design
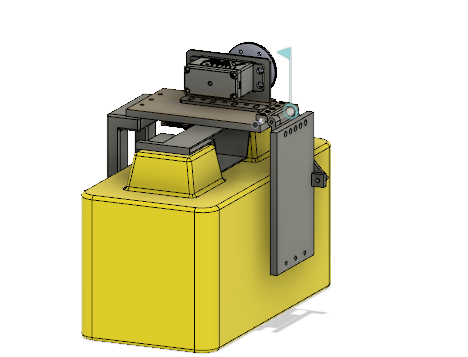
This version of the finger gripper is going to be mostly custom made to make it as simple and as compact as possible. This is just the CAD model of the actual design and we plan to update a little more before we can actually make the physical change on the actual gripper. The design remains the same but the gripper now has a new addition, a capstone deployer. The idea is to have the capstone preloaded on the gripper and have a mini servo drop it on the last stone we are placing. The design of this capstone is in another blog post, but the idea is to make it as small as possible to not make the gripper much larger.
Next Steps
We need to make this design perfect before printing, once that is done we can do so and begin its implementation on the robot.