
Materials Test Planning
Tags: think and designPersonhours: 3
Task: Create a system to test our materials to better understand their grip potential

Here at Iron Reign, we're used to using off-the-shelf materials for our robot. For this season, these include silicon oven-mitts and ice-cube trays, since we find these grip skystones pretty well. However, we need to do a thorough investigation of these materials before we can determine their efficacy on the robot.
Specifically, we plan to implement these parts on the underside of our gripper, to improve its friction when in contact with a stone. Our current gripper uses parts of ninjaflex gears but these aren't the most effective in picking up stones quickly. This is a bit of a concern since this year's game is so speed-based. As such, the time has come for us to replace the material on our gripper. However, before we can decide which material would have the best grip, we need to test them to determine their on-robot properties. To do this, we will implement a slip test as shown below.
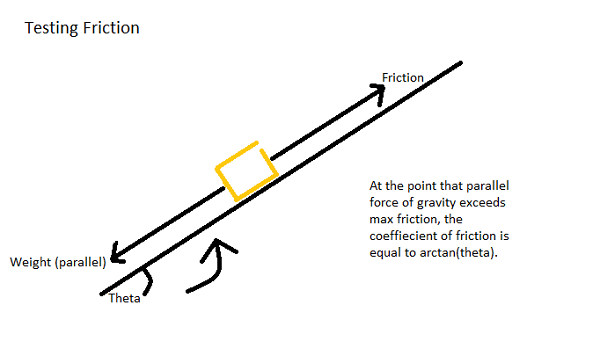
The main thing that we want to test is the amount of energy they have while rotating and then the amount of energy they lose upon collision. We plan to test this through the coefficient of friction of the mitts. Simply put, we will place the skystone on top of the of the silicon oven-mitts/ice-cube trays and will tape down the material being tested on a flat surface. Then, we will lift the surface and using simple inverse trigonometric properties, we will calculate theta, the angle at which the stone begins to slip from the material. The bigger the angle, the higher the friction coefficient of the material, which equates to it having better grip.
Next Steps
With our testing planned out, we will next begin documenting the angle at which the skystone slips from each type of material. The calculations from the actual testing, including the equation we used, will be inputted into a separate post.