
Control Mapping v2
Tags: think and controlPersonhours: 2
Task: Map out the new control scheme
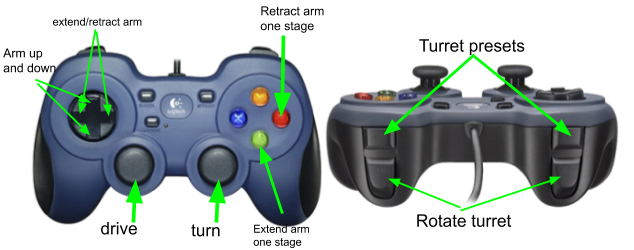

As we progressively make our robot more autonomous when it comes to repeated tasks, it's time to map these driver enhancements. Since we have so many degrees of freedom with TomBot we will experiment with using two controllers, where one is the main controller for operating the robots and the second handles simpler tasks such as setting the tower height and toggling the foundation hook.
Next Steps
We need to experiment with the two-driver system as well as implement a manual override mode and a precision mode where all the controls are slowed down.
Date | January 1, 2020