
Snapdragon - The Sequel
Tags: innovate and designPersonhours: 4
Task: Improve the precision of the Snapdragon.
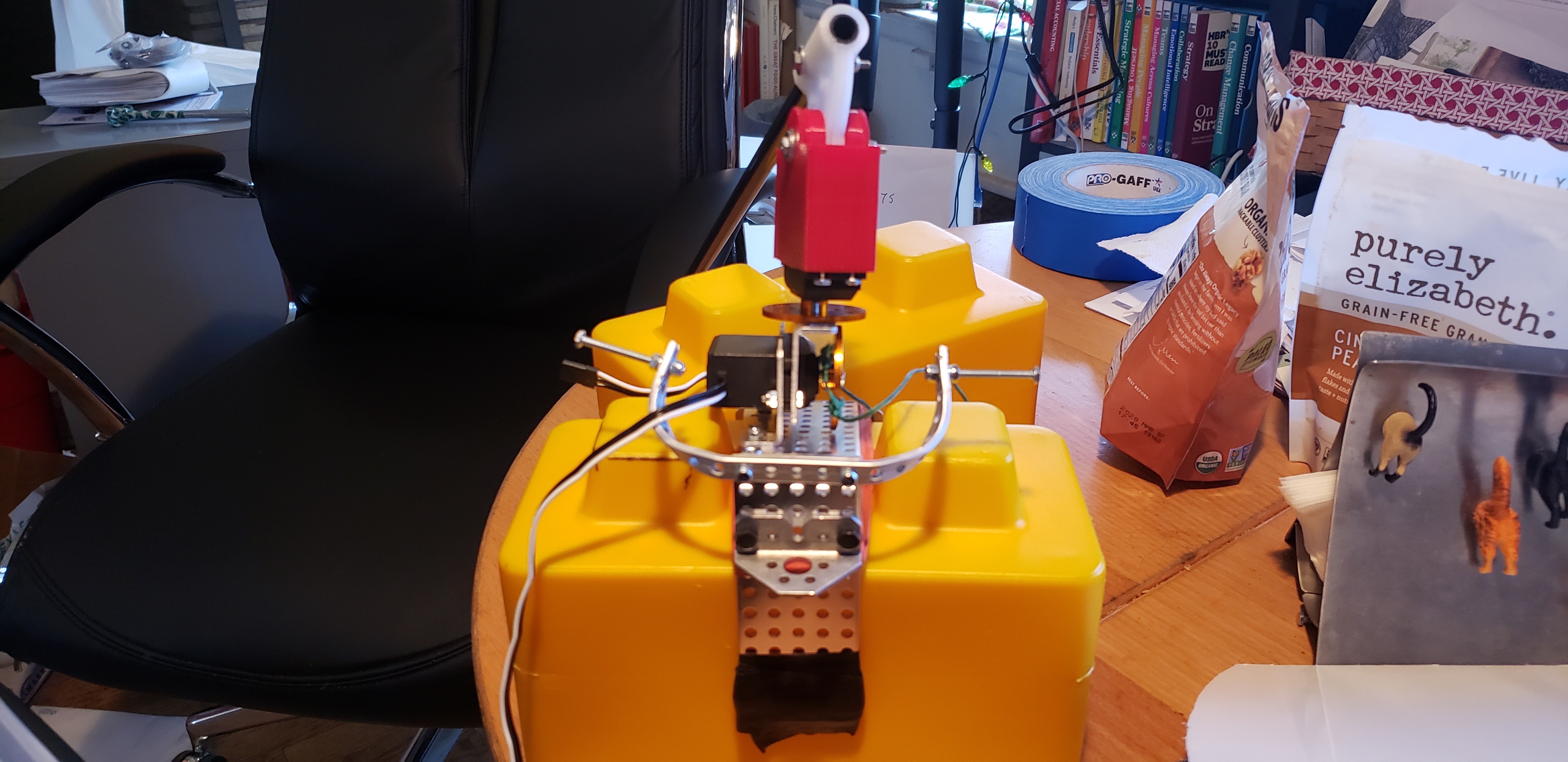
Last week, we prototyped a new gripper called the Snapdragon. Now it's time to give it more complexity. The Snapdragon is a passively-triggered gripper which closes down on a stone upon an impact-heavy contact with it. The main issue we're focused on solving is the impact which triggers the gripper - the gripper needs to be able to close only upon contact with the skystone and not with any other surface. To solve this problem, we added the servo horns, which make the snapdragon look like an actual dragon, for an increased comedic value. Before the servo horns, an abrupt stop by the metal plate of the gripper and the momentum of the "flap" below it were needed to grip a stone but this requires too precise placement of plates. With the addition of the servo horns, the servo horns physically trigger the drop so that the rubber bands holding the gripper in place can be tighter and have more grip.
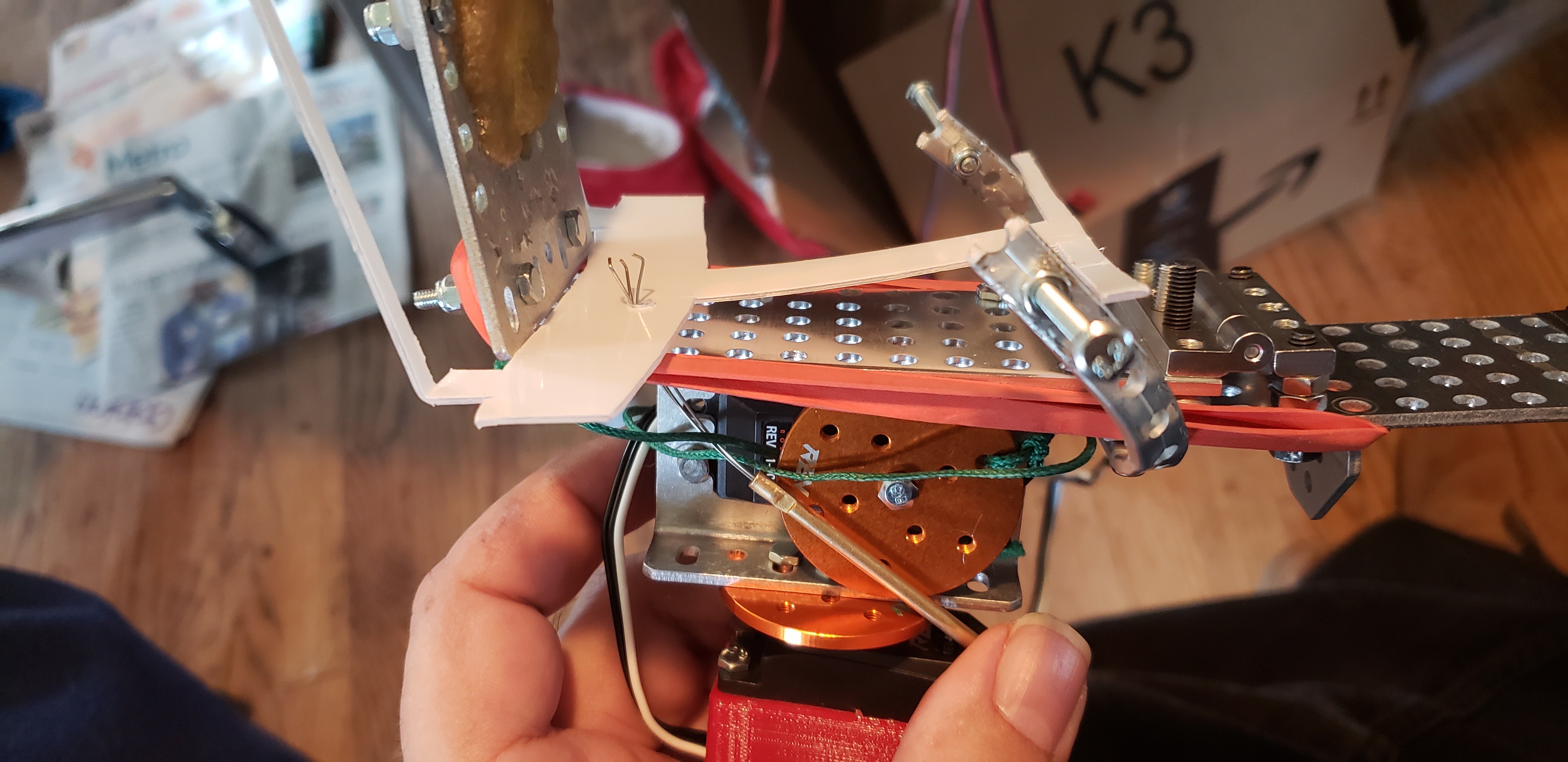
In addition to the servo horns, we will also be using a capstone dropper. The capstone dropper is mounted between the two servo horns, and has three small wired which will go through a hole at the base of the capstone. The dropper will be pre-loaded with the capstone and be released during the endgame. The capstone dropper has not yet been tested but we will get to that once we have controls to release the capstone.
Next Steps
We need to test the Snapdragon's new version extensively so that our drivers can get a feel for it. Next, since this is a passive gripper model, it would need more grip, so we also need to conduct materials testing on more materials to determine which material has the best grip and can be mounted on the gripper.