
Control And Vision DPRG Presentation
Tags: control and connectPersonhours: 6
Task: Present Control And Vision To DPRG And Gather Feedback

This saturday, we had the privilege to present our team's Control and Vision algorithms this year to the Dallas Personal Robotics Group. During this event, we described the layout of our robot's control scheme, as well as our OpenCV vision pipeline, in order to gather suggestions for improvement. This opportunity allowed us to improve our pipeline based on the feedback from more than a dozen individuals experienced in the designing, building, and programming of robots. We were able to demo our robot on a playing field, showcasing the mechanics of its design as well as semi-autonomous articulations to help improve driver performance.
Here are is the slideshow we presented to DPRG:

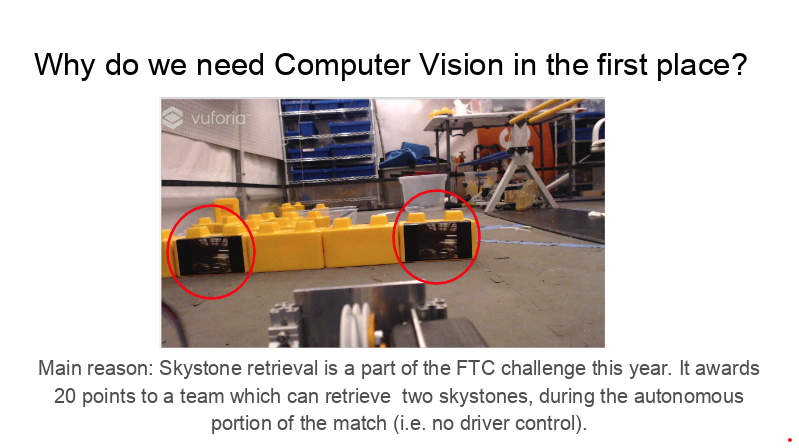
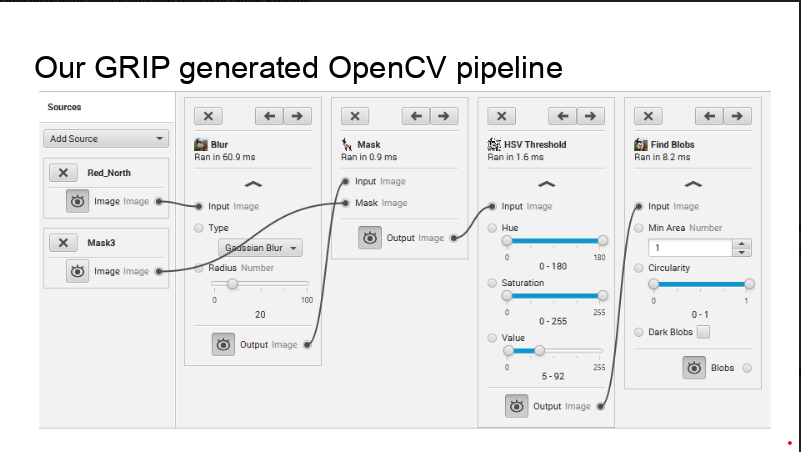
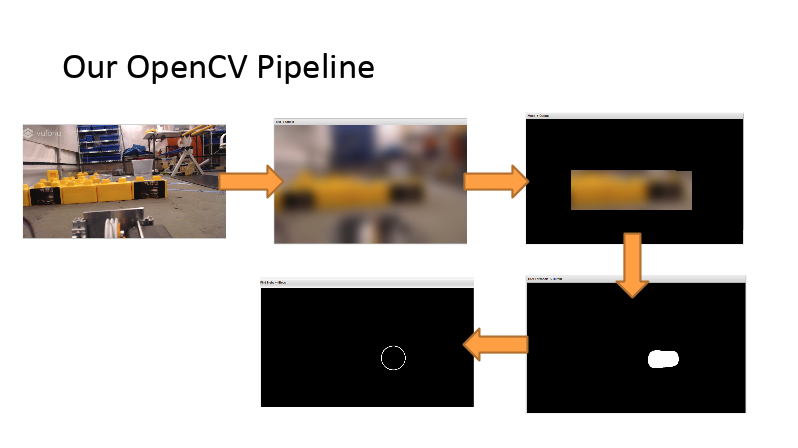
For this year's game, we chose a four step vision pipeline to detect skystones, which comprised of a blur, followed by a mask, then an HSV threshold, and finally a blob detector to locate the centroid of the black skystone. Although this pipeline worked fairly well for us, differences in lighting and the environment we are competing in may result in varying degrees of inaccuracy. To combat this, the DPRG suggested we used some kind of flash or LED in order to keep lighting of the stones consistent throughout different settings. However, this may result in specular reflections showing up on the black skystone, which will interfere with our vision pipeline. Another suggestion thrown was to detect the yellow contours in the image, and crop according to the minimum and maximum x and y values of the contour, allowing us to focus on only the three stones on the field and discard colors in the background. This suggestion is particularly useful, since any tilt of the webcam, slight deviation in the calibration sequence, or skystones lying outside the boundaries of the mask will not affect the detection of skystones.
Next Steps
The most significant input that DPRG gave us during the presentation was the cropping of skystones based on the size of the yellow contour present in the input image, allowing us to detect the black skystone even if it lies outside the mask. To implement this, we would have to test an HSV threshold to detect yellow contours in the image using GRIP, filtering those yellow contours appropriately, and cropping the input image based on the coordinates of a bounding box placed around the contour. Although this addition is not absolutely necessary it is still a useful add on to our pipeline, and will make performance more reliable.