
Archimedes Screw Intake
Tags: innovatePersonhours: 9
Task: Begin creating intake systems on CAD to test their potential
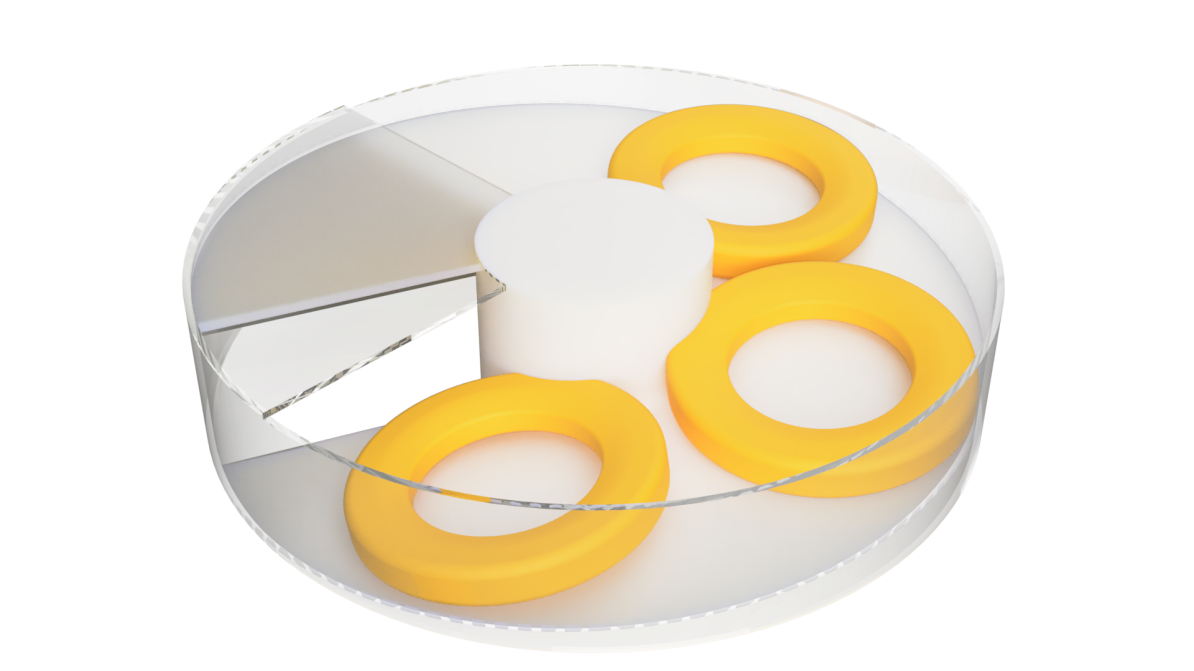
The Archimedes Screw Intake, as the name goes, was based on an Archimedes screw. A screw shaped surface would draw the rings from the fields and transfer it directly to the launcher as the screw rotates. Similar to the Archimedes screw water pump, it makes use of positive displacement and would rely entirely on the screw's movement for the rings to travel upward towards the launcher.
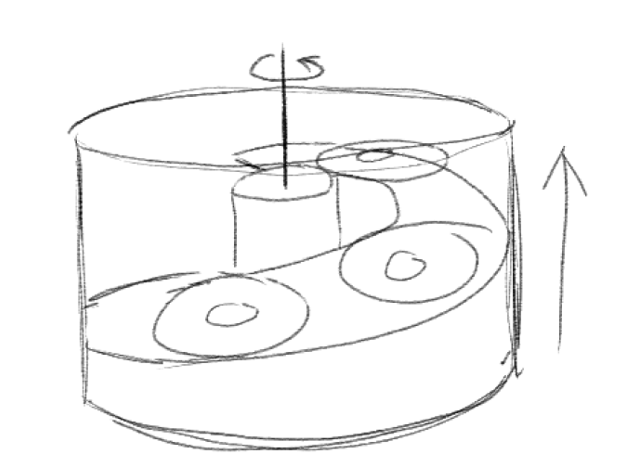
While this is an intruiging system, our biggest concerns with it are size and timing. This system would take up most of the volume of the robot. Also, since the screw would have to rotate entirely for one ring to be taken upwards, this is likely not the most efficient system and even the mere drawing of the rings into the system is likely to be more time-consuming. It would also be very difficult to make. So, this intake ends here in the concept stage.
Next Steps
Our next steps are to begin brainstorming ideas for other, more efficient intake systems. We may still come back to the Archimedes system but as of now, it is of lower priority. Rest in Peace Archimedes.