
RingSlinger 9000 Summary
Tags: design and innovatePersonhours: 1
Task: Summarize the key components of Ring Launcher 9000
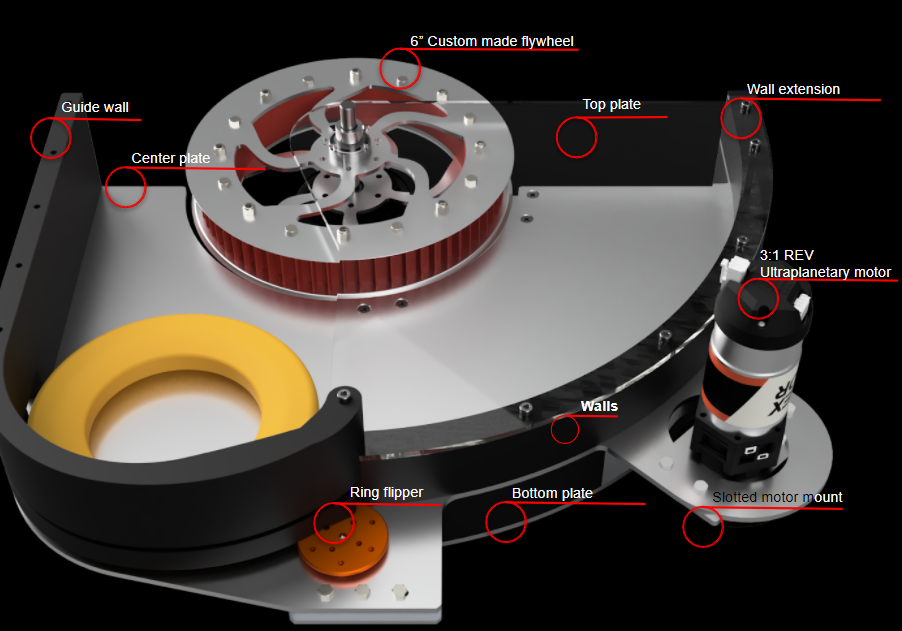
A ring launcher is more than just a flywheel; it needs a barrel to give the ring a path to move through. A 90 degree barrel is the best fit for ROBOT as the intake will take up the other half of the robot. The plan is to later on add an indexer to transport rings from the intake to the barrel in a way that can be controlled, that is, allowing the driver to manually choose when to let rings into the barrel.
The barrel design looks simple, but there are lots of hidden things making it work as intended. For one, the motor driving the flywheel is attached via a slotted motor mount. The mount is then placed directly on the center plate through an extension to the center plate. Additionally, there is a plate below the one that the ring travels on top of. This plate is used to keep the shaft in place, it follows a similar shape to the others to preserve strength, as it is half of what keeps the flywheel in place. The bottom plate also supplies support to the center plate, this is due to the fact that the center place is not attached to the flywheel, instead it has 3mm of clearance in case of any vibration the flywheel may have. Finally, at the exiting end of the barrel, the side wall extends linearly to ensure the ring doesn’t spin off its intended path.
Over to the other side of the barrel is the ring feeder. A huge nylon wall guides the rings into the ring flipper. The ring flipper is composed of a a servo with a custom made flipper to push rings into the flywheel.
Next Steps:
With everything milled out and 3-D printed, the next step is to take this to programing as the idea is to have the ring laucher be almost completely automated.