
A Lot to Intake
Tags: innovate and designPersonhours: 3
Task: Prepare the intake before the qualifier
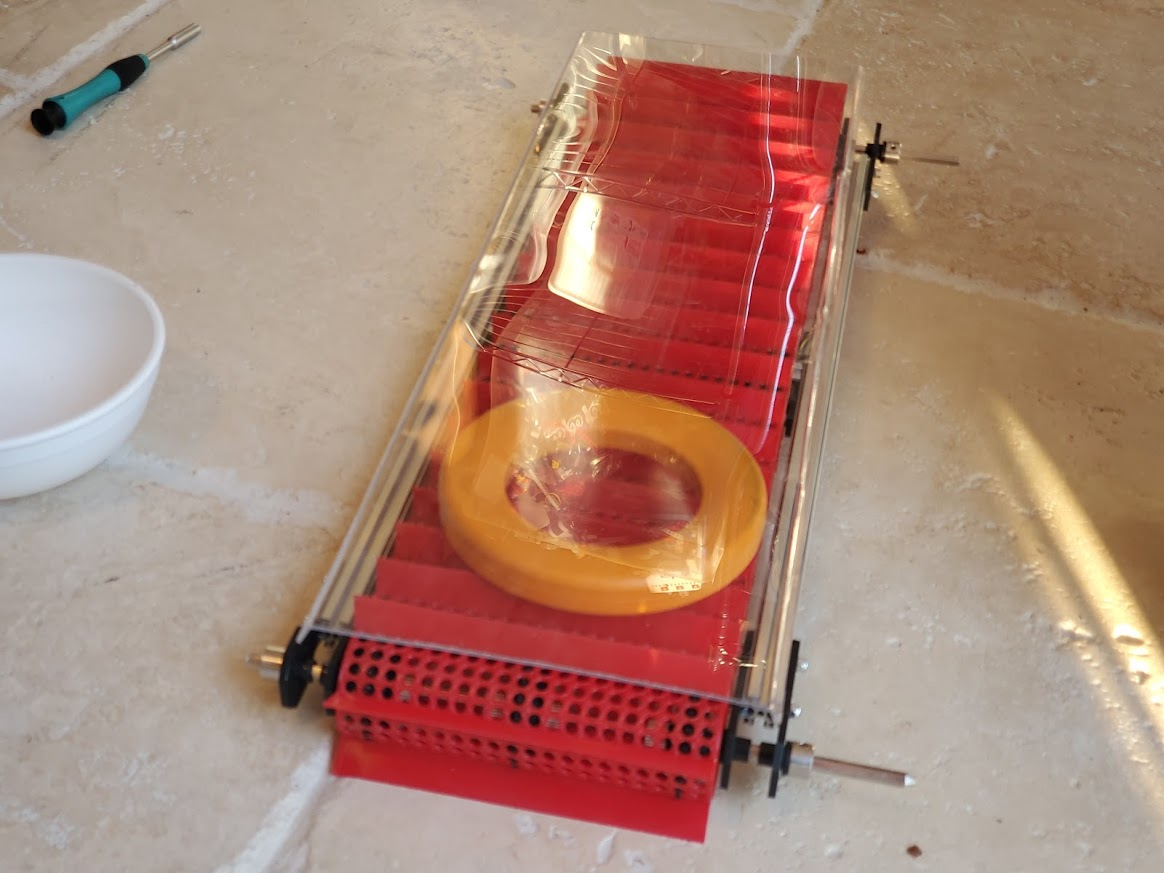
At today's meeting, Paul worked on the ringevator, with the guidance from Mr. V. The intake mechanism required a motor to be installed, which at first glance seems like light work. However, the intake is composed of two separate parts that move independently, connected by a hinge. The motor had to be attached to the static, robot part, however, the power had to be transferred to the belt, which just so happened to be on the dynamic part that swings around like a screen door in a hurricane, so mounting the motor on the swingy bit was out of the question. Paul took a page out of last years book, drawing inspiration from the elbow mechanism of Icarus and with some help from Mr. V, designed a mechanism that allowed the belt and hinge to rotate on the same axis, ensuring constant distance between the motor axis and the axis of rotation for the belt pulley. This allowed the motor to be mounted in a safe spot on the robot, away from the dangers of an FTC field, while simultaneously being able to drive the belt mechanism on the moving part of the robot. Future plans call for replacing the pulley drive bushings with custom fabricated ball bearings, and moving the motor further down the robot to lower the center of gravity.
Next Steps
The ringevator still needs to be mounted on the robot but this was enough progress to hopefully get us to a working intake before the qualifier.