
Repairing ‘Reach’
Tags: innovatePersonhours: 5
Task: Fix issues found by Drive Practice in the robot
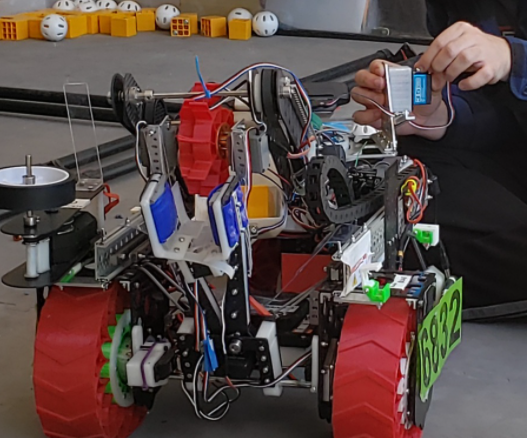
To better prepare for UIL, we have started using Driver Practice to find issues that would’ve impacted the robot performance at the competition. Within the first 15 minutes of driving the robot, the servo that sustains the crane experienced thermal overload and could no longer hold up the axel by which the crane was able to move vertically.
This required the deconstruction of the component to be able to access and replace the Steel Servo that had issue with the weight of the crane. This led to further experimentation with different aspects of the crane, such as the servo horn to test whether the axel would fully insert into the horn and reworking the distance sensor on the bucket so that it would function properly and automatically drop any held element onto the top of the shipping hub, though dropping elements into the shared shipping hub still needs some improvement. Unfortunately, even after changing out the Servo, the weight of the crane would still cause thermal overload, leading us to determine that it was unable to be fully fixed without reworking the crane in its entirety.
Next Steps
Continue with Drive Practice and rigorous testing of the robot attachments to see what needs improvement or complete reworking before UIL