Code Progess for November
Tags: software and journalPersonhours: 0
April Tags
Crane Memory System
One unique feature of this robot is the crane's memory system. The crane remembers its position where it picks up a cone and where it drops the cone. This memory allows the crane to take over positioning the gripper for picking up a cone and dropping it off. The driver now only has to finetune the pickup and drop position and initiate the pickup and drop sequence.
Grid Drive
One helpful feature that would make the robot more reliable is grid drive. Since the field this year has all the objects placed in a grid, the robot can navigate between the pylons relatively easily however we found that drivers could not be as precise driving than the robot’s odometry and as such we developed a system where the driver tells the robot where they want the robot to go and the robot creates and follows a path to get to its target location. This system decreases transit time significantly and makes driving more precise. This system can also be used with the crane to pick up cones from a specific location and drop them at a certain pylon of the driver's choosing.
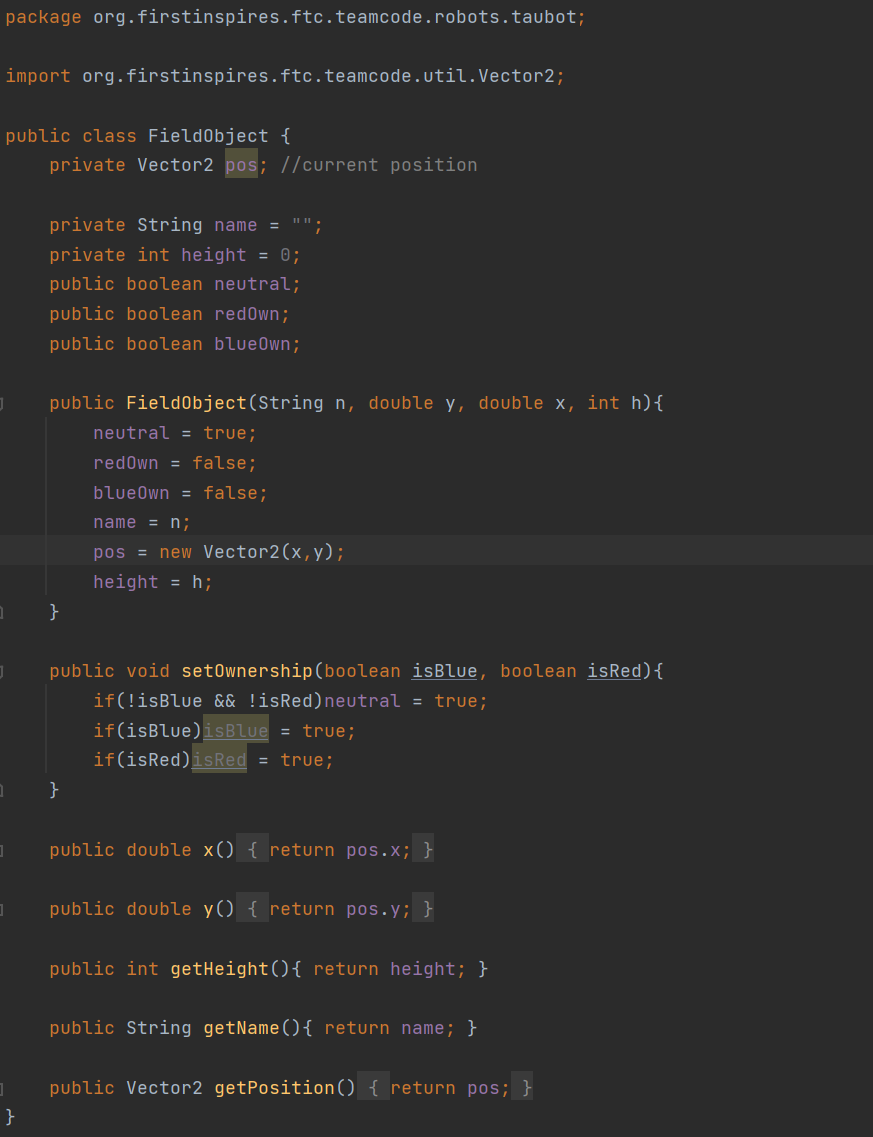
Field Class