
League Meet #2 Post Mortem
Tags: control and innovatePersonhours: 50
Task: review the progression of matches in our latest League Meet

Team 6832, Iron Reign, and our sister teams, Iron Core and Iron Giant had our second league meet earlier today. Overall, it was a very good learning experience and we got to see the functional robots of many of the teams in our league in action. After observing many unique robots, we learned a lot about the differences in strategies between us and other teams and how we could use our differing strategies to work together in a cohesive alliance.
Play by Play
Match 1: Win
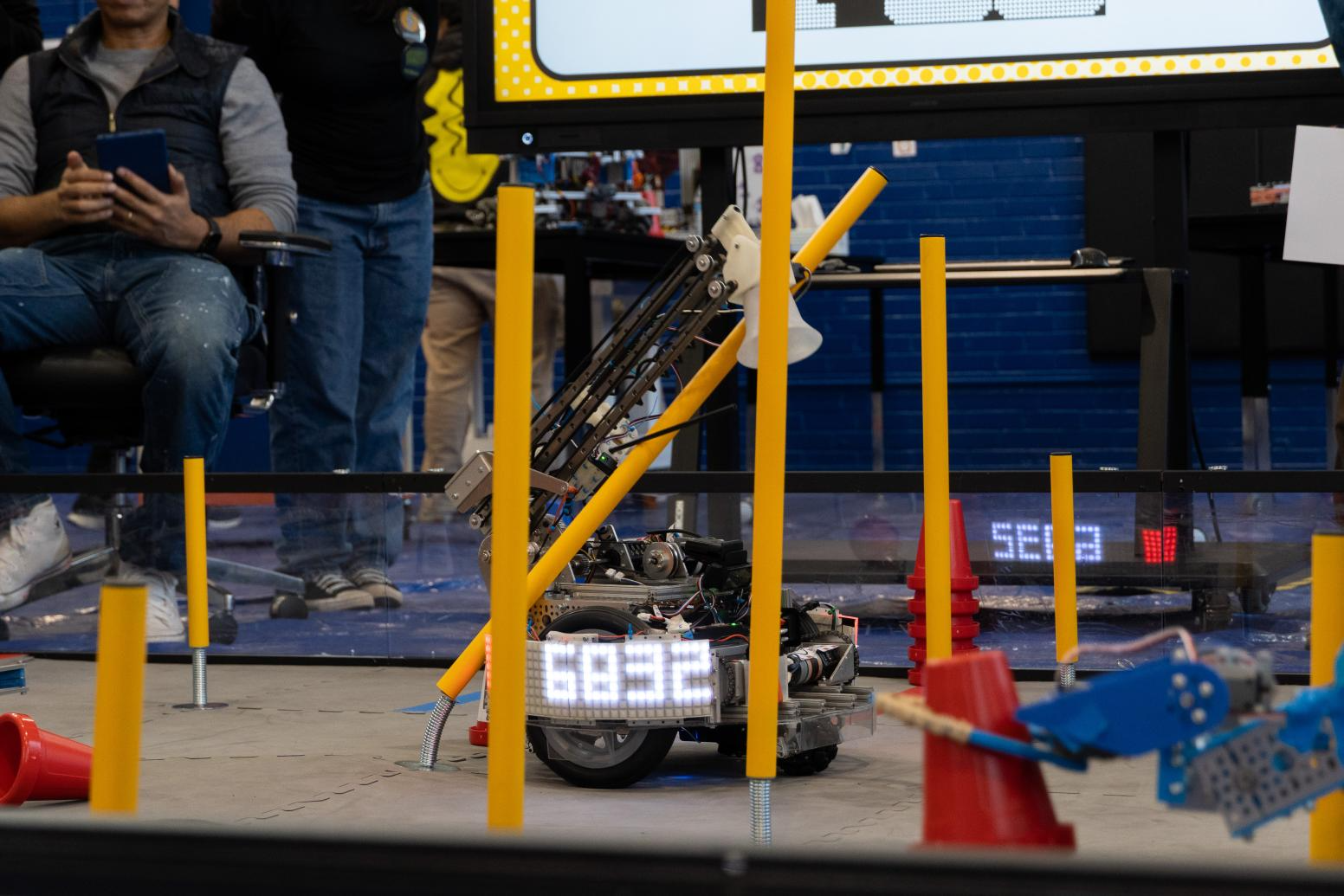
We got a total of 45 points, but we got a 20 point penalty for our human player placing a cone in the substation at the same time the robots were in the substation. In the autonomous section, Taubot's arm wrapped around the pole, which got stuck in the wires. We were unable to get a cone or parking. During driver control, we got 3 cones, and we got 1 cone with the beacon during the end game. Our robot scored 28 points by itself.
Analysis: During autonomous, our robot was overshooting while trying to place the cone, so it would get stuck around the pole.
Match 2: Win
We got a total of 88 points, but we got a 10 point penalty for our human player, once again. In the autonomous section, we were unable to get the cone, but the overshooting issue was resolved and we got the points for parking. During driver control, we got 4 cones, and we got 1 cone with the beacon during the end game. Our robot scored 53 points by itself.
Analysis: Our autonomous section needed to be tuned, and our drivers need more drive practice so the arm can be more reliable.
Match 3: Win
We got a total of 68 points, with no penalties. Our human player was incredible at telling the other team to not put their robot in the substation as she was placing cones. In the autonomous section, we scored a cone and got parking. This was the most we were capable of in autonomous. In driver control, we got 3 cones and we got another cone with the beacon in the end game. Our robot scored 53 points.
Analysis: We could have gotten more points during driver control if our gripper mount wasn't so loose and didn't need to be constantly tightened, and we needed more drive practice for more precision/reliability.
Match 4: Win
We got a total of 78 points, with no penalties. In the autonomous section, we scored a cone and got parking, once again. In driver control, we got 5 cones, and we got another cone with the beacon in the end game. We scored 63 points with our robot, which is the highest score we got individually the whole tournament.
Analysis: This match was the limit of both our autonomous and driver control, which means we need to push the limits and make the robot more efficient so more points are possible.
Match 5: Loss
We got a total score of 67 points, with no penalties. In the autonomous section, our robot couldn't score the cone, but we got parking. In driver control, we got 3 cones, but we didn't manage to get a cone with the beacon during the end game. We got a total score of 35 points with our robot.
Analysis: We need more driver practice and precision, because adjusting the arm slightly when it's fully extended is incredibly inaccurate as it has very high momentum. We also need to practice different strategies, specifically defense, and not get distracted from our strategy by the strategy of the opposing team. Our autonomous section also needed to be more reliable.
Post Mortem
Strengths:
- Not having to move the placement of the robot to score
- Flexibility - we can score across the field and change where we pick up our elements without interfering with our alliance's strategy or robot
- Human player - very good at telling teams not to move into box when she's placing things
- Communicating with alliance partners
Weaknesses:
- Robot is bad at making circuits due to design of the robot
- The big arm is too shaky to score quickly because of the weight
- Cycle time is too long
Opportunities:
- Doing some defensive play
- Scoring on multiple poles
- Adding a fourth extension stage by decreasing the weight of the already present rods
- Increasing the motor count to 5 on top of the turntable to support shoulder joint with more torque for the 4th stage of the arm
Threats:
- Letting the strategy of our alliance team interfere with our strategy
- Getting distracted by the opponent's strategy, limiting how well we can perform
- The cables of the robot getting tangled around itself or poles