
Overview of the past 3 weeks
Tags: journal, think, innovate, control, and designPersonhours: 294
Task: Recount the developments made to the robot in the past 3 weeks

The past three weeks have been incredibly eventful, as we try to beat the clock and finish TaBbot: V2. We had a lot of work to do in build and code, since we were putting together an entirely new robot, coding it, and getting it competition-ready for the D&U league tournament on 01/28/2023.
Build:
We were making many changes to the design of our robot between TauBot: V1 and TauBot: V2. We had a lot of build and assembly to do, including putting the rest of the UnderArm together, adding it to the robot, CNCing many of the carbon fiber and aluminum components and assembling the new tires. Our 3D printer and CNC were running constantly over the span of the past 3 weeks. We also had to make sure the current iteration of the robot was working properly, so we could perform well at our final league meet and cement our league ranking going into the tournament.
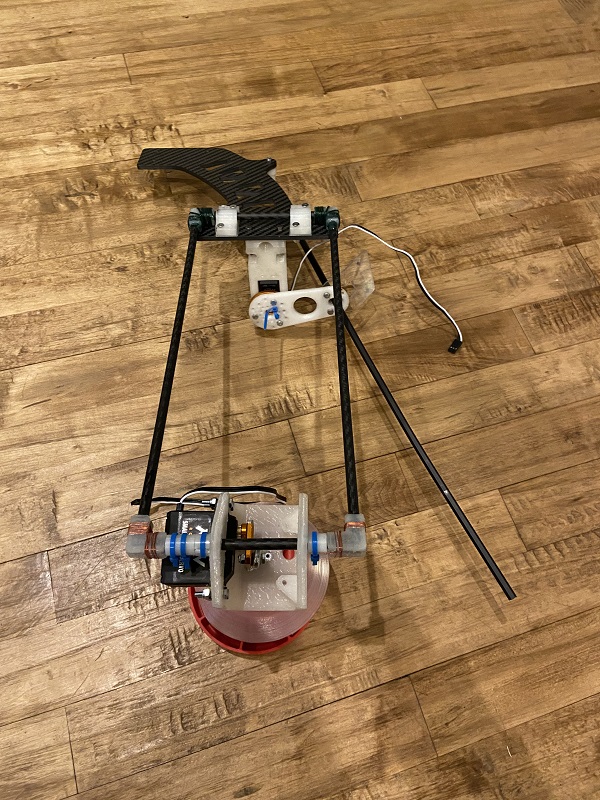
Leo focused on assembling the UnderArm and attaching it to the robot. The UnderArm was fully designed, CAMed and milled prior to the tournament, but we didn’t get the chance to add it to the robot or test the code. We were still having a problem with the robot tipping over when the Crane was fully extended, so we decided to attach the omni wheels and “chariot” for the UnderArm to the robot, to counterbalance the Crane when it was fully extended. We experimented with it, and this almost completely eradicated our tipping problem. However, while testing it separately from the robot, we got an idea for how the UnderArm would work with the Crane, and how we should begin synchronizing it.

Because the majority of the new iteration of Taubot is entirely custom parts, designing the robot was all we had the chance to do prior to the tournament. However, we managed to get the basic chassis milled with carbon fiber and a sheet of very thin polycarbonate. We also began assembling parts of the new Shoulder and Turret assembly, but decided to not rush it and use the old assembly with the new chassis of Taubot: V2.

Before the tournament though, we incorporated the new UnderArm assembly, carbon fiber chassis, and newly-printed TPU wheels with the Shoulder, Turret, and Crane from TauBot in preparation for the upcoming tournament.
Code:
On the code side of things, we mainly worked on fine tuning the code for the scoring patterns and feedforward PID. Most new things which we will be adding to our code will be done after we have completely attached the UnderArm to the main body of Taubot: V2, because that is when synchronization will occur.
Vance updated auton so it would calculate how many points were feasible and go for the highest scoring option after 25 seconds. He also sped up auton, so it wouldn’t take as long to get a cone and score it. The preloaded cone was scored consistently, but grabbing new cones from the conestacks and scoring them was still unreliable.
When he wasn’t making auton more stable and reliable and working through the scoring patterns, Vance was working on coding the parts of UnderArm which would be independent of the rest of the robot. He added a simulation so it would be possible to test UnderArm off the robot, and changed UnderArm servo calibration. Limits were also added to UnderArm so it wouldn’t continuously loop through itself.
Next Steps:
We need to perform well at the Tournament to ensure our advancement. If all goes well there, the next steps would be a Post-Mortem and the continued development of TauBot2 and the portfolio in preparation for either a Semi-Regional or Regionals.