
Meeting Log 2/17
Tags: control, journal, and thinkPersonhours: 32
Work on build, code, and presentation in preparation for Regionals next week.
With the Regional competition coming up quite soon, we needed to get to work finishing up the build for TauBotV2, optimizing the code with new inverse kinematics for the double-jointed UnderArm, finishing up some subsystem blog posts, and practicing and preparing our presentation.
Presentation:
With a heavily below-par performance than the Tournament presentation where we skipped the entire Connect and Motivate section, we needed to stress practicing the performance this go around. We condensed the information into quick lines for each slide, but also expanded the overall amount of content to allow us flexibility.
After that, we got in valuable presentation practice to ensure that we don’t run over the 5-minute mark and miss out on sharing valuable information to the judges. At around a medium-ish pace, we finished the entire presentation in about 4:15. Pretty good, but that does mean that a few more slides of content could be added to maximize the time.
Build:
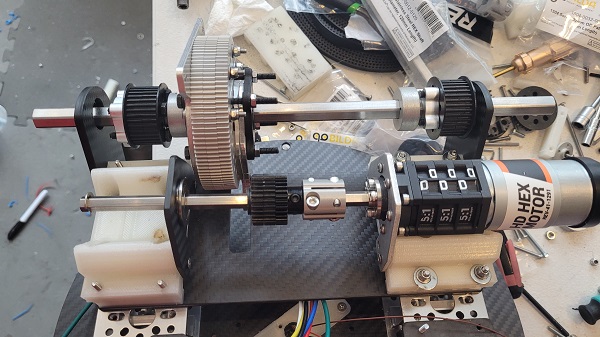
The new shoulder, turret, and linear slides need to be fully assembled and attached to TauBot2. We made the decision to move the entire shoulder assembly up a centimeter because of size restrictions and requirements, which meant we needed to reprint most of the motor mounts for the extension and rotation motors. We also finished assembling together all the linear slides and their carriages.
Code:
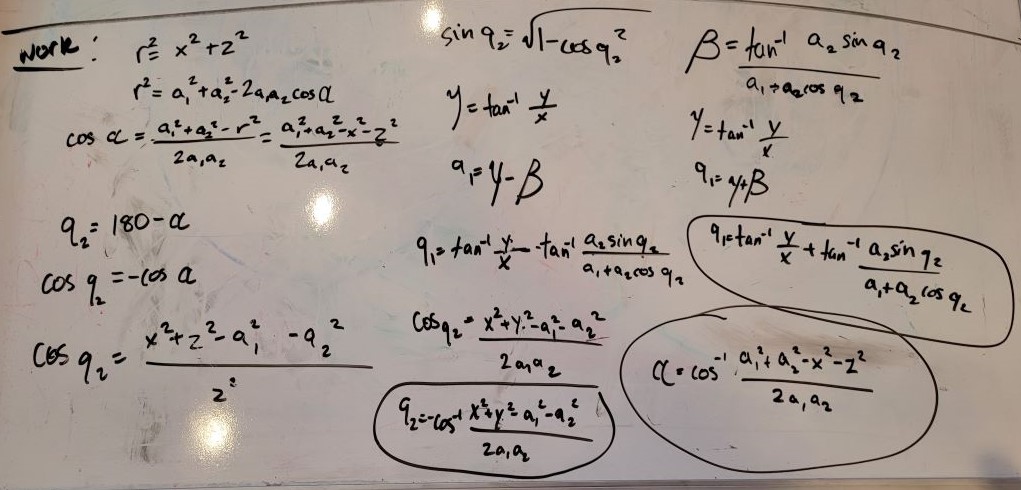
This is where most of the progress for today was made. Because of the double-jointed nature of the UnderArm crane, we needed new inverse kinematics equations in order to derive the proper angles for both sets of servos. From a given (x,y) point and the constants a1 and a2, which each refer to the length of each section of the crane respectively, we should be able to calculate the requisite servo angles. Through both right triangle trig and the law of cosines, we could find angle ɑ, the angle for the servos mounted by the turret, and angle β, the angle for the servos mounted between the two sections. This should allow us to move the crane to any position we desire simply with a set of coordinates.
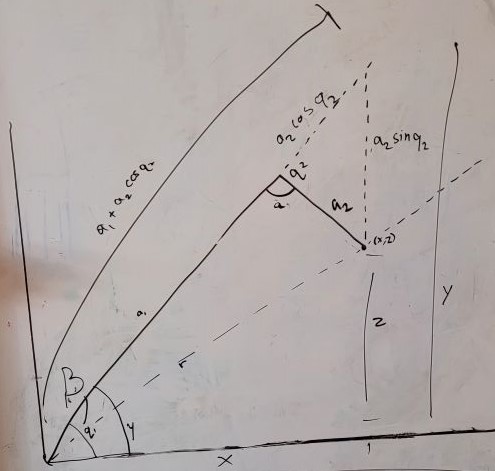
We plugged both equations into Desmos to find the acceptable movement distances for the entire crane and added these calculations to the codebase, although we were not able to test them tonight. This is sort of a brief overview, but there will be a more detailed blog post covering the inverse kinematics of the UnderArm soon.
Next Steps:
With Regionals next week, we need to finish the full build of TauBot2 and begin coding the UnderArm so our two “intakes” can work together effectively in union. The UnderArm is still heavily untested, and there is a chance it fails miserably, so we need to start working on ironing out its issues and getting the entire robot to a functional state where it can cycle and score a few cones as intended. Our portfolio still needs to be converted into landscape and additional content added to fill up the vast amounts of empty space that remain. We also need to start working on possibly designing a custom binder out of carbon fiber to house the entire portfolio. With only a week left, we need to start acting now in order to finish everything before Regionals. The presentation is also a little bit low on content and slides, especially for pit interviews and Q&A, so we will be transferring more of the portfolio content to the presentation. To be competitive at Regionals for an award and advancement, we will need to tier documentation, which means sorting out any potential issues and lots of effort and practice. Overall, we made lots of progress, but there is still a lot of work left to be done.