
Scrimmage Before Worlds
Tags: control, innovate, journal, and thinkPersonhours: 28
Attending a Final Scrimmage Before Worlds
Today, we attended a scrimmage that team 8565, Technic Bots, graciously invited us to. The point of this scrimmage was to get some time seeing the changes which the other Worlds-advancing NTX teams had implemented, and to get some ideas of strategies and alliances. This was the first time we were able to get proper driver practice with the newly designed Transfer Plate and Nudge Stick.
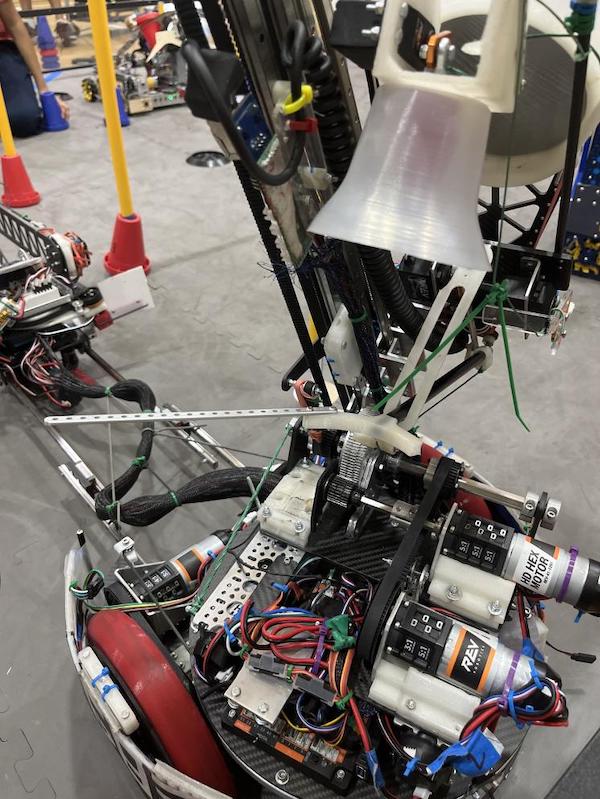
One of the main problems we experienced was our cable harnesses malfunctioning. The servos kept getting unplugged or the signals just weren't sending properly, which was a large issue. This meant that our Gripper Flipper assembly wouldn't flip into place, so the cones which the UnderArm was depositing onto the Transfer Plate would remain on the Transfer Plate and act as a hindrance. This also increased the chances of double cone handling, which is a major penalty. The Bulb Gripper was unable to get cones off the Transfer Plate because the servo which controlled the Gripper Flipper wasn't working. However, we learned that UnderArm to Transfer Plate mechanisms worked incredibly effectively and consistently.
We also learned an important lesson about calibration; without realizing there would be consequences, we started calibration of our robot with the robot in the starting position, against the walls of the playing field. During calibration, the Turret does a full 360, during which the nudge stick kept hitting the walls of the playing field, causing one end to completely snap off at the joint which connected the REV channel to the nylon.
The scrimmage also gave us a chance to work on auton. During our autonomous drive, we use a timer separate from the one on the driver station to make sure that we can complete or abort our auton safely before the driver station timer kills power to our robot. In our auton testing, we found that this time-management system was not properly iterating through the stages of our autonomous. To solve this, we reviewed and edited our code to work with our timer system and performed repeated trials of our autonomous system to ensure reliability. Once we fixed these bugs, we had the chance to begin working on improving the accuracy of our parking procedure. Our parking procedure hadn't been modified for our new cone-stack-dependent autonomous strategy, so we changed the code to account for it. We are now well on the way to a consistently performing autonomous mode.
Next Steps:
We will continue working on building and code, especially auton. We need to make sure that our Nudge Stick works in practice, and we need to make sure our drivers get time to get used to having a Nudge Stick to control. Overall, we need drive practice, and we need to make parking and getting cones from cone stack consistent in our autonomous period.