
Center Stage Robot in 2 Days(Ri2D) Overview
Tags: journal, innovate, design, think, and motivatePersonhours: 42
Task: Build, Code, Test, and Film our Center Stage Ri2D
This blog post will serve as a more in-depth analysis of Ri2D, including dives into specific subsystems and rationale.
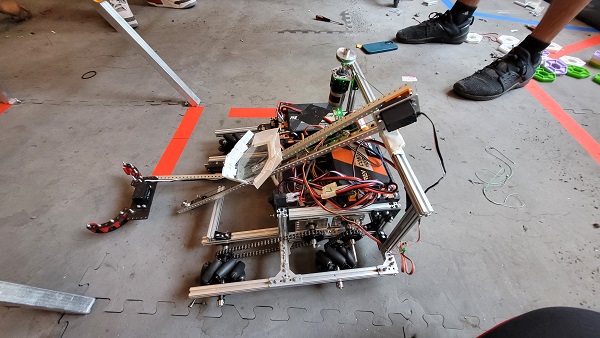
The Chassis
In order to save time, we repurposed a basic mecanum and REV rail chassis from our sister team, Iron Giant. It is a basic REV rail frame with mecanums driven by motors and chains, along with all the requisite electronics. We built all of our additions on top of this base; however, we did spend a sizable amount of time fixing the chains on the chassis. Mecanums were the clear-cut choice because of their simplicity to use, the lack of on-field barriers that could interfere with them, and their strafing capabilities(which we unfortunately did not get working due to balance issues). One of the critical issues with this chassis was its lack of weight balance. The Control/Expansion Hub and Battery were located on the front side, preventing our Ri2D from strafing and causing the opposite side to pop up when driving.
The Gripper
We found that a prototype of our old UnderArm gripper from TauBot(last year’s robot) fit the pixels relatively well, which allowed us to adapt it to this competition. It features a pincer grip articulated by a single servo between 2 carbon fiber plates. There are also custom Ninjaflex squinches on the pincers to allow for better gripping. Since we wanted to implement a transfer strategy, we gave the gripper limited mobility, allowing it to only pick up 1-2 pixels from the ground and then lift them for transfer.
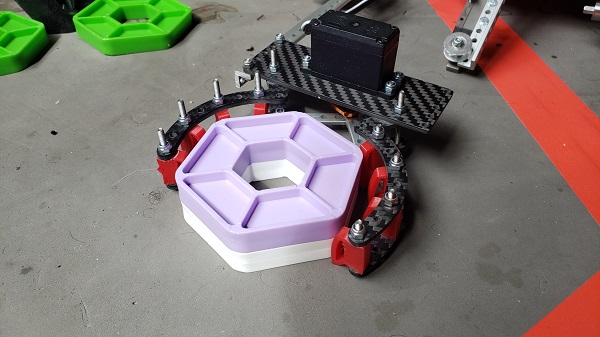
The Scoopagon/Transfer System
In order to limit the need for our robot to turn in order to pick up pixels and deposit them on the backdrop, we implemented a basic transfer system into our Ri2D. The primary mechanism that deposits the pixel is an arm with a pixel holder built out of tape and polycarbonate, which we call the “Scoopagon”(it scoops the pixel up and is shaped like a hexagon). The gripper flips up and drops the 1-2 pixels into the Scoopagon during the transfer. This allows us to reduce cycle time by reducing the amount of driving we have to complete; however, sometimes pixels can get stuck on the edges of the Scoopagan or get tangled with other parts of the robot.
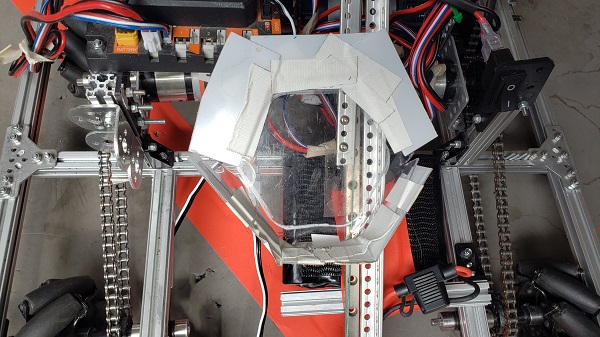
Scoring System
In order to score the pixels, our Ri2D uses the Scoopagon in combination with a rotatable arm and extendable linear slide. The Scoopagon is mounted on an arm that can be rotated by a servo, creating a “catapult-like” motion. The entire servo and arm assembly is then placed on a linear slide that can extend out to allow us to place pixels higher on the backdrop and from farther away. One potential issue with our implementation is that the arm may accidentally propel pixels, which is not allowed by the rules, so the arm must be close enough to ensure the pixels are placed onto the backboard.
![]()
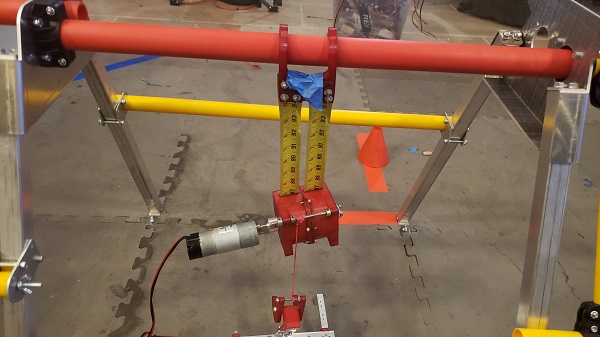
Expansion Ideas and Limitations
Because of time constraints and the extended field assembly time, we could not attempt the drone and hanging aspects of the game. However, we found a hanging mechanism used by previous year’s robots(pictured below) that relies on tape measures. Due to the massive amount of weight imbalance, we were unable to attach it to our robot, but we hope to be able to test it out on future robots. As for limitations, the robot itself was very tough to drive due to the weight imbalance and general lack of driver practice, and the linear slide was poorly built and ended up being quite unreliable.
Overall, though, Ri2D served as a valuable learning opportunity for us, and we will be using everything we have learned over the past 2 days as we move forward into the season.