
Meet Our Field Class
Tags: control, software, and journalPersonhours: 10
Task: Explain how we map the field and use it in our code
A huge focus this season has been navigation; each scoring sequence spans the whole field: from the wing or stacks to the backdrop, and it’s crucial to make this happen as fast as possible to ensure high-scoring games. To do this, the robot needs deep knowledge of all of the components that make up the field.
Enter: The Field
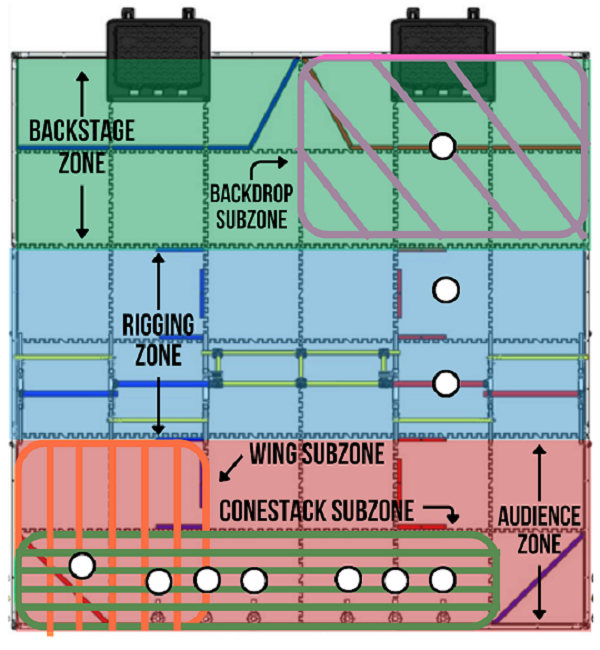
Our field class is a 2D coordinate grid that lines up with our RoadRunner navigation coordinates. It’s made up of two types of components: locations & routes. Locations include our Zones, Subzones, and POIs.
The field's red, blue, and green colors demarcate our overarching Zones. Zones are the highest level of abstraction in our Field class and serve as higher-level flags for changes in robot behavior. Which zone the robot is in determines everything from what each button on the robot does to whether or not it’ll try to switch into autonomous driving during Tele-Op.
The crosshatched sections are our Subzones. Subzones serve as more concrete triggers for robot behaviors. For example, during autonomous navigation, our intake system automatically activates in the Wing Subzone and our drivetrain’s turning is severely dampened in the backdrop Subzone.
The circles in the diagram are our POIs. POIs are single points on the field that serve mainly as navigation targets; our robot is told to go to these locations, and the navigation method “succeeds” when it’s within a radius of one of those POIs. A good example of this occurs in our autonomous endgame: the circle in front of the rigging serves as the first navigation target for hang and the robot suspends itself on the rigging at the lower circle.
A combination of Zones, Subzones, and POIs play into our automation of every game, and our field class is crucial to our goal of automating the whole game.