
Applying Forward/Inverse Kinematics to Score with PPE
Tags: control, software, and journalPersonhours: 10
Task: Explain how we use kinematics to manipulate PixeLeviosa (our Outtake)
This year’s challenge led Iron Reign down a complex process of developing an efficient means of scoring, which involved the interaction between the intake and outtake. Currently, we are in the process of implementing Forward and Inverse Kinematics to find and alter the orientation of our outtake, known as PixeLeviosa.
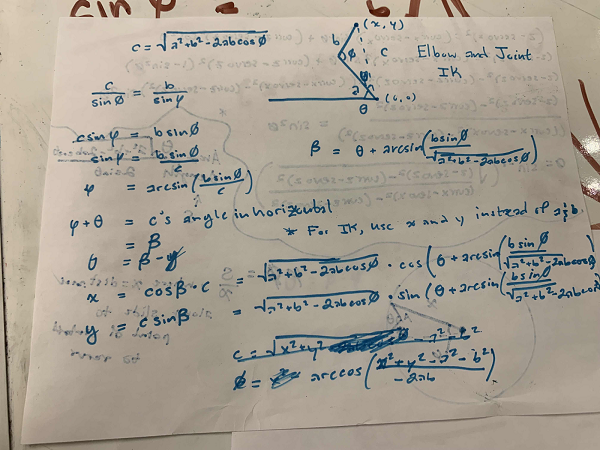
Forward and Inverse kinematics both revolve around the part of a robot’s subsystem, known as the end-effector, which is essentially what the robot uses to score or achieve certain tasks (that being PPE’s scoopagon). The simple difference between forward and inverse kinematics is that forward is the method of find the end-effector’s position given the angles of each respective joint and using geometric principles to find its position from there, whereas inverse kinematics has you finding the angles of each joint given the position of the end-effector. Typically, one will use the methods and formulas derived from forward kinematics to then apply them for inverse kinematics.
For PPE, we use inverse kinematics to set PixeLeviosa’s orientation given a point in relation to the backdrop such that the outtake maneuvers itself for effective scoring and reducing cycle times. We hope to have this fully fleshed out by State!