
Roller Claw Update
Tags: journal, innovate, think, and designPersonhours: 10
Task: Improve our Roller Claw Concept
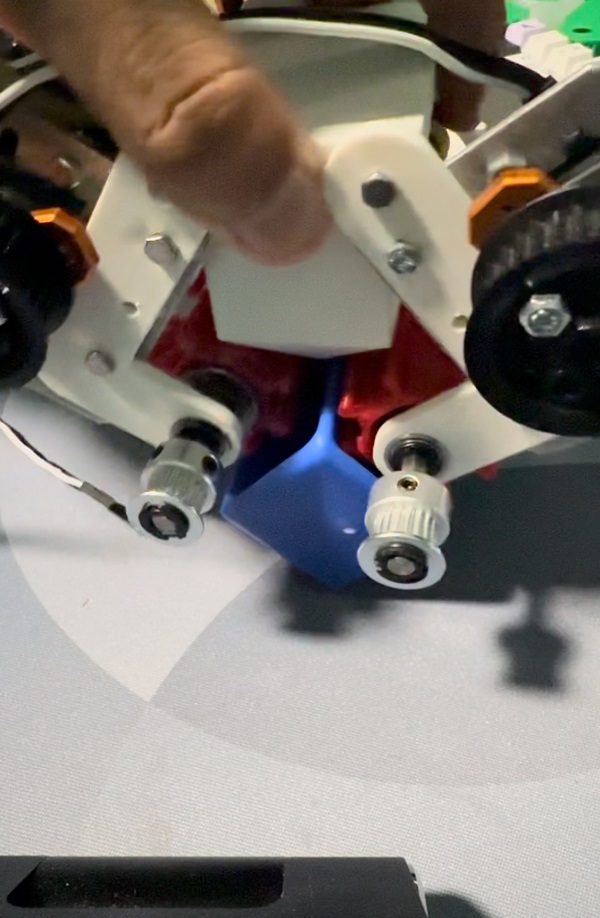
We’ve made progress on the 2nd version (V2) of the roller claw that is more structurally sound and has an improved intake. To improve the structural stability we added a second standoff between the plates of the claw halves to stop them from twisting while intaking. Additionally, we added a large pyramidal structure in the center of the claw in order to help align samples during intake. This structure also doubles as a physical stop for the claw halves so they can’t move past their intended minimum limits, an issue we observed during testing of the prototype.
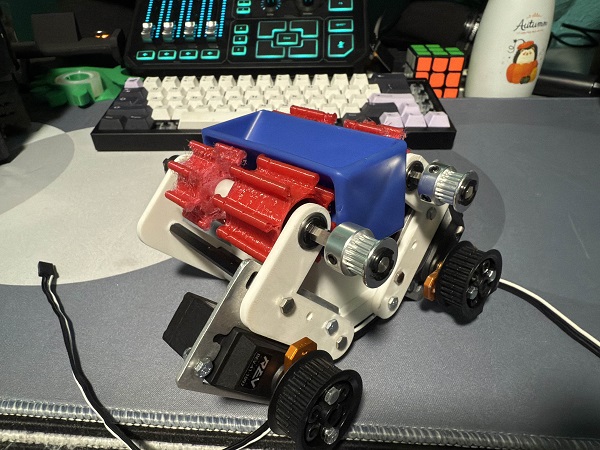
We decided to test a variety of springs, moving away from surgical tubing, and ultimately landed on a 1.1cm x 3.8cm x 1.2cm extension spring. This spring produces enough tension to properly clasp onto samples and specimens alike even when encountering “turbulence”. Despite it still losing tension overtime, like surgical tubing, it cannot untie itself and will take a longer time to lose enough tension for the impacts to be noticeable. A con of having this increased tension is that the claw does require more precision during intake and more force than the previous version due to the spring’s higher tension, something that is an unnecessary burden. While we are confident this will be our final form of tension, we may test out different spring strengths or other forms of tension. Another change we made was to increase the number of rollers, from 2 to four. While some of the rollers were iffy, the increased number of them made intake more efficient. After further testing, we came to the realization that the stiffness, material, and current roller profile worked well for what we wanted. We also decided that stiffer rollers are not needed; however, testing rollers with more walls and/or higher infill percentage is not out of the question as it could produce improved results.
For the next version we will focus heavily on the coding aspect. We plan on adding a color sensor to locate preferred color samples. Additionally, we want to embed a color sensor into the tip of the aligner to detect whether we have collected the preferred sample or not. We will also finalize the servo mounting system to start powering the rollers. Despite this version requiring more precision due to the spring, by adding rotational movement to the rollers the intake will require less precision. We also want to begin printing parts out of nylon to test durability and tolerances. We believe this change in material will cause some revision on the design due to the difference between nylon and PLA.