
Code Progress this Season
Tags: think and journalPersonhours: 150
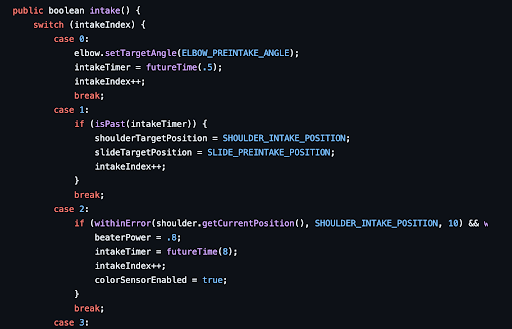 The beginning of our Intake articulation
The beginning of our Intake articulation
There have been several strides on the code end this season including coding Auton and shifting to using a Limelight camera. Autonomous wise, we had a good start in the beginning of the season, since it was very reliable during meet one. In our first meet we were able to score a preloaded sample to the low basket consistently. Since then, we have started coding Auton so the robot can score the additional three samples near the net zone. One challenge we are facing with this is intake of the sample most closest to the field wall. We want the robot to prefer rotational moves over translational movement to reduce error, but due to the shape of the beater bar, finding the correct angle without moving the robot has proven to be difficult. Future goals for Auton include finishing up the code for the 3 samples as well as starting on specimen placement when our second linear slide gets attached.
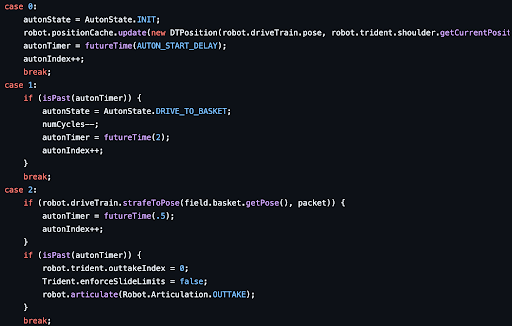 The start of our autonomous state machine
The start of our autonomous state machine
This season, we have been testing out the Limelight camera in relation to relocalization–allowing the robot to see where we are on the field during matches. This will make the robot's movements more consistent, as we’ll have the ability to recheck and correct our position every scoring cycle. We’re also working on automating intake as much as possible. The end goal is that with a click of a button, the beater bar will intake either neutral or alliance-specific samples (ignoring the opposing alliance’s color) and then autonomously return to a safe driving position, primed for our driver to drive to the basket for a similarly automated outtake. We also noticed that our hardware is much more capable extension-wise than the sizing limits so we have been experimenting with different types of software limiters to create an artificial bounding box around the robot, similar to the box used in sizing, that restricts the movement of the robot beyond that sizing box. Lastly, we’ve also been working on persisting robot state information from autonomous to teleop. Key pieces of information that we’re focused on right now are the robot’s location, how far the linear slide is out/where the shoulder joint is, and in what position of outtake or intake the robot ended in.
From the beginning of the season till now, the code team has been working on several different aspects to pursue the ultimate end goal of fully autonomous match play. There is a lot of work left, but there has been a lot of progress and testing that has been done.