
Code Update Blog
Tags: outreach and motivatePersonhours: 30
We've been making significant strides with code developments this season with vision-based localization using Limelight and April Tags, fundamental movement controls for driving and maneuvering, and game mechanisms like our flywheel launcher.
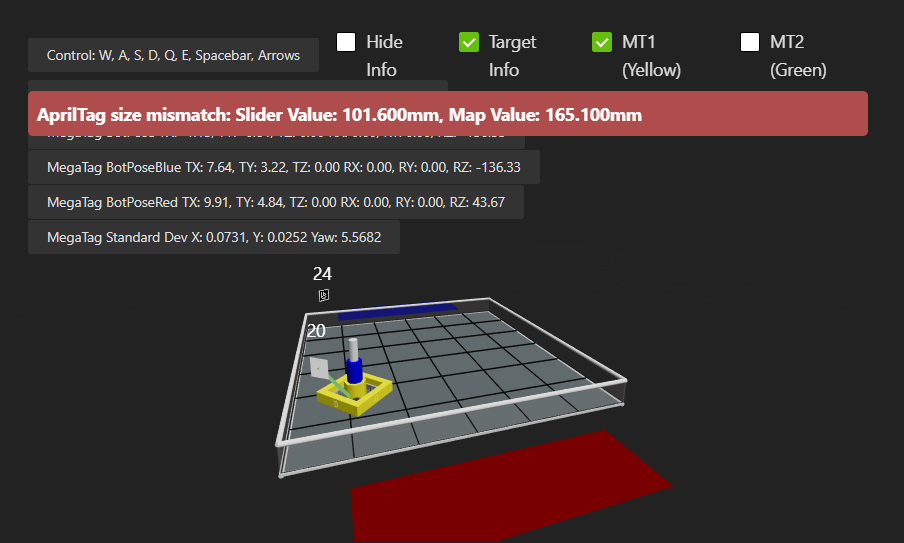
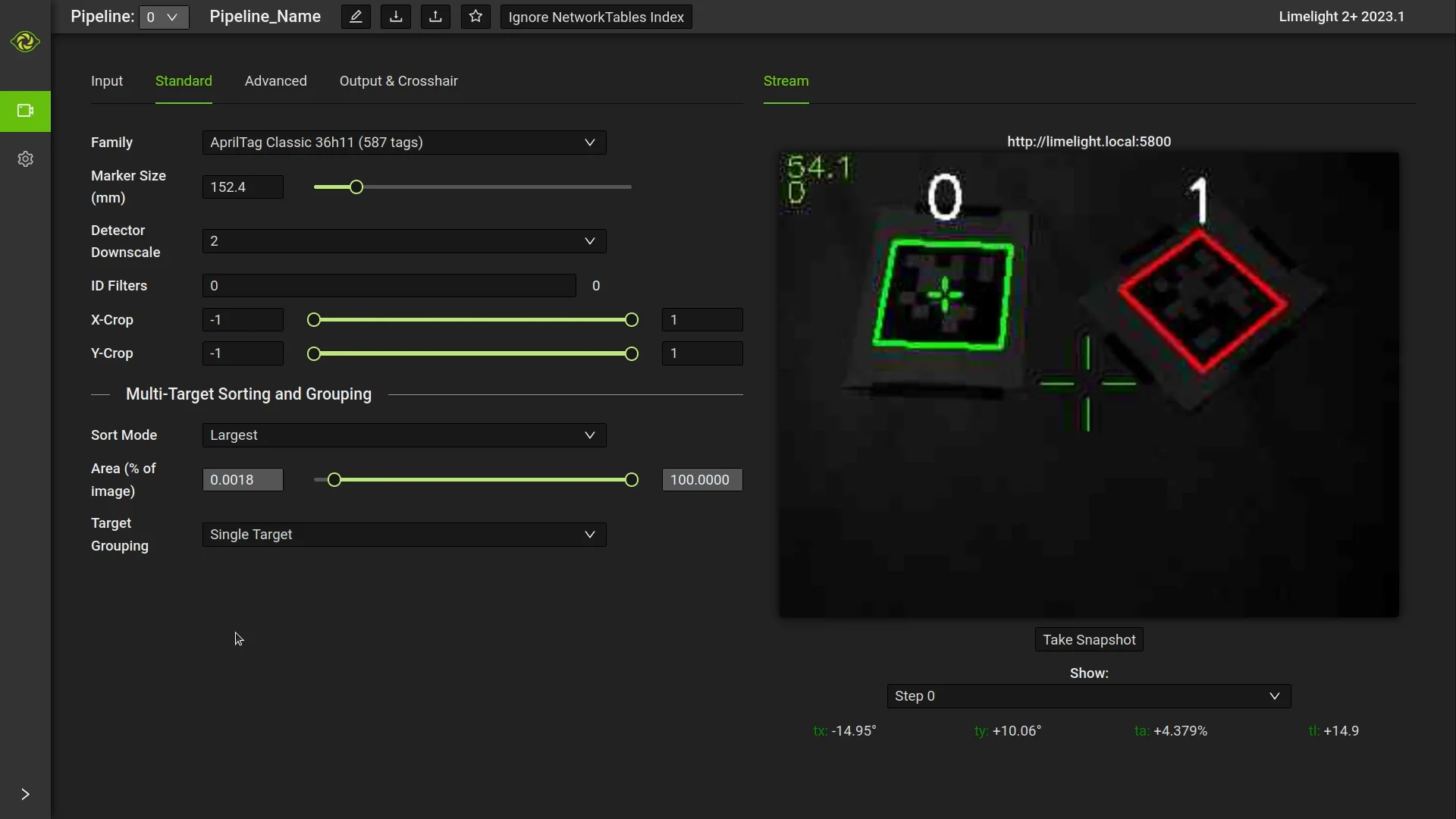
One of our biggest wins has been successfully utilizing the Limelight camera with April Tags to determine our robot's location on the field. We downloaded the field map and integrated it into the Limelight web interface, which has been instrumental in getting accurate positioning data. The camera is now reliably recognizing April Tags, giving us the foundation we need for autonomous navigation. We mounted the Limelight in a tilted position to mimic what the final configuration will look like, which helps us avoid surprises later in the build process.
We've also developed and tested the basic movement code for our robot, implementing the fundamental controls for driving, strafing, and turning. Using the x and y vectors combined with rotation and strafing, we applied the Pythagorean theorem to create smooth, coordinated motion that gives us complete maneuverability. Beyond movement, we've made code to launch the ball as well. The current implementation is straightforward, pressing the A button on the controller powers the motor, and it gives us a solid starting point for more sophisticated launching mechanisms down the line.
While we're proud of our progress, we know there's still work to be done. Our Roadrunner autonomous path following the library needs calibration to achieve the precision we're aiming for, and we've identified some issues with our swerve drive code that need addressing to ensure optimal performance. We also want to make the Limelight recognize specific patterns beyond April Tags and relay that information to the robot for smarter decision-making.