
Finger Gripper Version 4 CAD
Tags: design and innovatePersonhours: 6
Task: CAD a slightly different capstone version to improve upon v3's issues
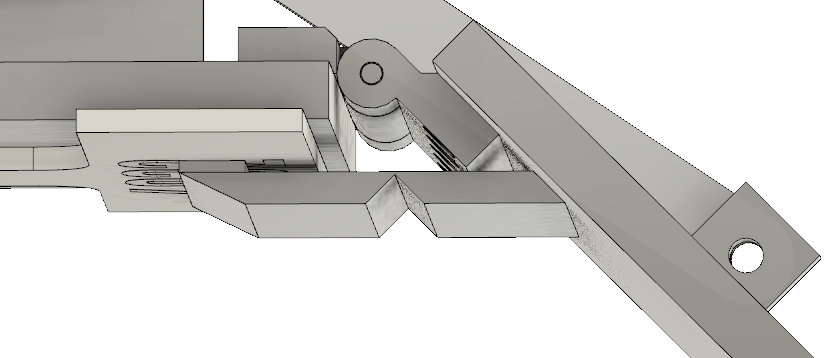
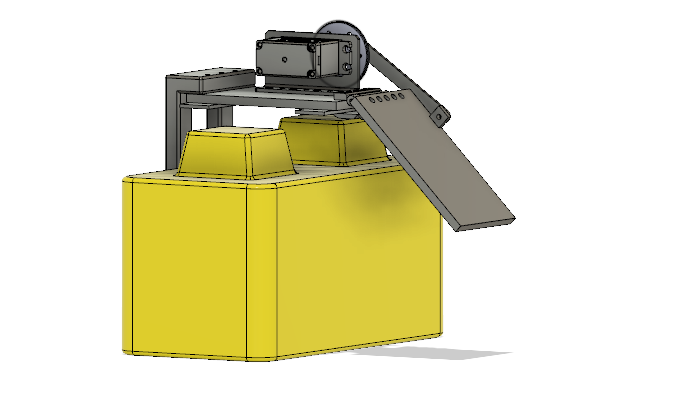
On this minor update to our flat gripper design a dropper for the latest capstone was added. Our capstone design (which can be seen here: E-65 ) is minimalistic to allow it to be placed on the gripper and only deployed until the last stone in the match is placed to cap it. The basic idea for this capstone dropper is to have a bar which has the number 6832 on it to match the 6832 indent on the capstone. This dropper will keep the capstone in place until the gripper is opened to beyond 45 degrees. To allow the gripper to actually close, a triangle was cut off the dropper as seen in the image above. Here is the final design:
Next Steps
Once the design is finalized(there may be a 5th version if a change is needed) this will be 3D printed and will replace the current gripper on the robot.