Intro
Iron Reign has existed, in one form or another, for the past
eight years. We have competed in FLL, Google Lunar X Prize Challenge, and now,
FTC.
While our team originated at WB Travis Vanguard and Academy,
we are now hosted by the School of Science and Engineering at Townview, in
DISD. Despite our school being 66% economically disadvantaged and being Title
1, our school consistently ranks in the top 10 nationwide. As well, our school
has numerous other award winning extracurricular, including CX Debate,
Math/Science UIL, and more.
A History of Iron Reign
Iron Reign has been a team for eight years. We initially
started as an FLL team, plateauing in regionals every year we competed. We also
did Google’s Lunar X Prize program every Summer,
achieving finalist status in 2011 and 2012. Upon moving to high school, we
started doing FTC, as FRC was too cost-prohibitive to be parent-run.
We have been an FTC team for 6 years, advancing further and
further each year. Last year, we got to the South Super Regionals, qualifying
by winning the North Texas Inspire Award. In Georgia, we were the first alternative for Worlds if another team dropped out due
to cost.
Also in FTC, we compete in the Texas UIL State
Championships. For those unfamiliar with UIL, it is the main organizational
committee for all public school academic and athletic events. Through UIL, we
helped compete in the first test program for the UIL Robotics program and since
then have competed in every subsequent tournament.
Outreach
Iron Reign spends a large amount of time on outreach. This
year alone, we have put in 500 man-hours and created 2800 individual
connections to people in our community. Our goal of this outreach is to reach
disadvantaged children who would not normally have the opportunity to participate
in STEM programs in order to spark their interest in STEM for future learning.
Some of our major outreach events include presenting at the National Science
Teachers’ Association Convention in Florida, hoping to inspire people in other
regions to adopt our methods of outreach. We volunteered at a Microsoft youth
convention to spread STEM awareness, as well as volunteering throughout our
school district.
We also volunteer for FIRST. We have hosted a scrimmage for
our entire school district, DISD (one of the largest school districts in the
country), and are hosting a qualifier for the North Texas region in December.
We also instruct parents and educators on how to start a FIRST team when
volunteering, as Iron Reign itself was started by parents at WB Travis.
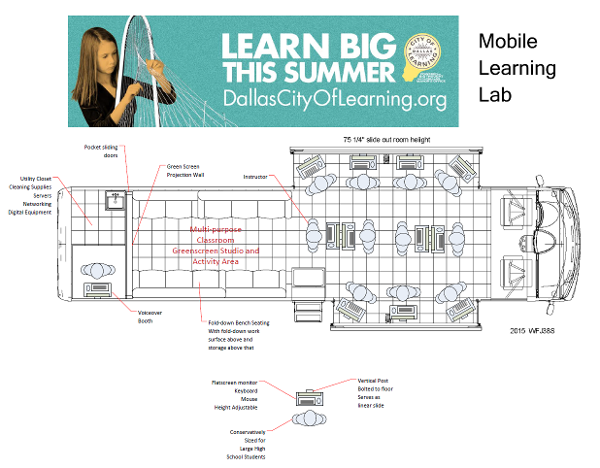
Our outreach stands out from other teams through our mode of
presentation. Last year, we renovated a 90’s Seaview Skyline RV, took out the
“home” components, and turned it into a mobile tech lab to read underprivileged
demographics within our community. Our RV currently holds 4 3D Printers, 30+
computers, 3 widescreen TVs, and 1 microwave. Our current curriculum consists
of teaching kids 3D modelling in the back of the RV, using Google Sketchup, as
it is free and available to any family with a computer. We usually help them
design keychains, as they are memorable, but don’t take excessive time to print
on our printers. In the front, we teach kids how to use EV3 robots and teach
them how to use the EV3 programming language to compete in a sumo-bot competition.
We also give advice to parents and educators on how to start FIRST teams. To
fill and staff the RV, we have received grants from Best Buy to purchase the 3D
printers and laptops, grants from non-profits such as BigThought and Dallas
City of Learning to fund the building and upkeep of the RV, and staffing from
BigThought and AmeriCorps, as well as our own team. The AmeriCorps staffing is
especially notable, as it is a US Federal Government program to support civil
service within communities.
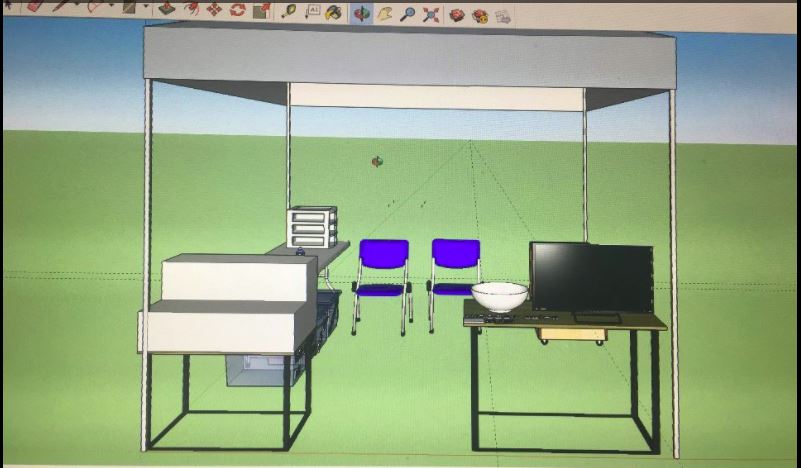
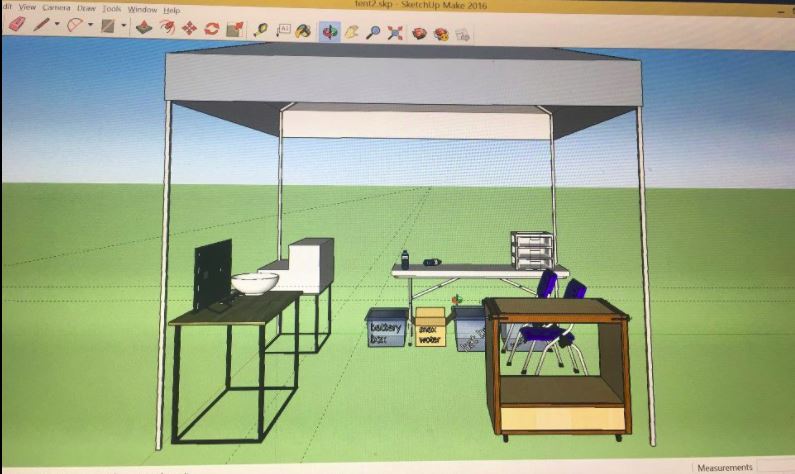
When not in outreach service, we can transform our RV into
tournament mode. We have taken numerous long-distance road trips aboard our RV,
with locations such as Austin, Arkansas, and Florida. We substitute the laptops
for bandsaws and drill presses, use the flat screens
to program, and bring our higher-quality personal 3D printer. At tournaments,
we encourage other teams to board our RV, not only to encourage them to start
their own similar programs, but also to help them with mechanical and building
issues.
Business and Funding
Normally, Iron Reign does not get major funding. However,
this year, we have seen our funding, sponsorships, and grants increase
exponentially. Currently, those include:
·
BigThought - RV materials, staffing, and upkeep
·
Dallas City of Learning (DCOL) – RV materials
and upkeep
·
Best Buy – 4x3D Printers, Laptops for RV
·
AmeriCorps – RV staffing
·
DISD STEM - $3000 of REV parts and 2 full
practice fields
·
Dallas Makerspace – Access to machining tools
·
DPRG – Robot assistance
·
FIRST – Tournament fees
·
Texas Workforce Commission – Grant
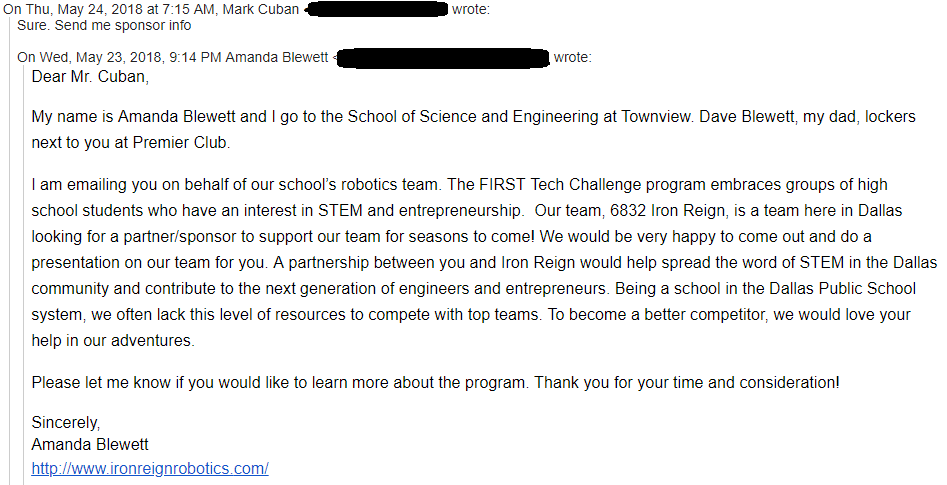
We are always seeking out new sources of funding. In the past, we have applied for prior grants
by sending letters to STEM-curious companies in the Dallas area. For example,
we have previously applied for a $4000 Orix grant, a STEM foundation dedicated
to spreading STEM to the underserved. Also, recently, we received an additional
grant from Best Buy for our distinguished service to the underprivileged within
the Dallas area.
In previous years, we have lacked the ability to get
significant transportation fondant to tournaments. However, through our
partnership with DISD, we have solved that problem. And when DISD is unable to
provide transportation due to short notice, we can provide our own
transportation due to our building of the RV.
Reference Business Letter from Last Season
“Dear Orix,
Iron Reign Robotics, a
robotics team of 7 years, is competing in the 2016/17 First Tech Challenge
Velocity Vortex game. We are based out of the School of Science and Engineering
(SEM) in Dallas which is a title one school.
The population of the
public school is racially diverse and 68 percent of the students are on
free-or-reduced lunch. In spite of our economic challenges, SEM is regularly
considered the school that offers students the most growth in the entire
district (highest effectiveness index) and is regularly in the top 10 in many
national rankings. But as the second robotics team to be formed at this Dallas
ISD Magnet, we are underfunded by the district and need to reach out to
organizations that are investing in the long-term future of our community.
Each year we deepen
our advanced robotics skills, improve our ability to organize around common
team goals, and learn how to better communicate with technical professionals so
that we will prepared make an impact as we continue through college and
eventually join the workforce. Last year our team made it to the Regional
Championship during the FTC season and then proceeded on to the UIL State
Robotics Championship in Austin during the summer. This year, with your
support, we are striving to make it to the 12-state super regional in Georgia
and go from there to the World-wide competition in Houston.
Yet we spend a
significant amount of our efforts investing in younger students outside the
team. We work very hard to let young students in North Texas know about the
opportunities in STEM education. We mentor students in elementary and middle
schools. We regularly participate in a series of STEM outreach events to help
younger students think of themselves as future scientists, engineers and
technical professionals. This includes presenting at events like the Dallas
Mayor’s Back to School Fair, Earth Day Texas, and Moon day at the Frontiers of
Flight Museum just to name a few. Last year (2015/16) our outreach involvement
amounted to 400 team person-hours in service to 2,200 people. We are unaware of
any other FTC team in our region that does as much outreach as we do.
This year we’ve
stepped those numbers up to over 500 person-hours serving over 2,000 people so
far just this summer. This was because we took on a project to renovate an RV
to create a mobile learning laboratory for the Dallas City of Learning. Not
only did we turn the interior into a mobile technical classroom with 3D printers,
but many team members volunteered to teach robotics and 3D modelling and
printing on board while volunteering for AmeriCorps with Big Thought this
summer. The team was featured as a “Class Act” on TV channel CW33 because of
this effort.
Unfortunately, time is
money and the time it takes us to contribute to each of these events costs us
dollars we don’t have. We all love teaching young children who are interested
in robotics and technology and we hope what they receive is beyond value. But
we also need to raise our competitive game and new parts cost money. When jerry
rigging and reusing parts unsuited for the job, we waste time that could be
used to make more progress and continue the advancement of our robot. As we
continuously refine our design, new parts are needed and some need to be
replaced as we strive for an efficient and reliable entry. The other piece of
the financial puzzle is transportation costs. This year we plan to take part in
multiple competitions including out-of-state competitions in order to deepen
our competitive potential and improve our chances of advancing to the next
level. Competition expenses beyond the standard local track are some of the
hardest expenses to fund.
We are asking for
$4,000 to help us continue our journey into robotics and we hope that Orix can
become a major supporter of our team while we continue to invest in the futures
of many more students in North Texas. We would love a chance to visit with you,
show you our robot in its current form, and discover together how much our
mission and your focus areas have in common. Please let us know how to schedule
that time. Until then, you can access much more information about Iron Reign on
our team blog: http://www.ironreignrobotics.com/
Warmest
Regards,
Iron
Reign “
Looking Back, Moving Forward
In the past, sustainability has not been a major concern of
Iron Reign’s. We’ve essentially had the same team for seven years. This year,
our eighth, we’ve finally lost members through graduation. As a result, we’ve
had to substantially reconsider our approach to recruitment and how to manage
our changing team.
We already have another team in our school, team 3734
Imperial Robotics. 3734 is an entirely
different team, with different sponsors, members, robots, journal, outreach,
and codebase. That being said, we recruit the more accomplished members of
that team. The teams’ relationship is most similar to the difference between a
Junior Varsity team and a Varsity team.
We tend to recruit based on robotics experience, but having
robotics experience alone is not a guarantee of joining our team. Iron Reign
has a specific culture, and we tend to recruit people whose personalities fit
our culture. We also do not accept people who only want to join robotics as a
resume booster. While robotics is indeed a resume booster, and we allow every
member to claim co-captain on their college applications, members of Iron Reign
ought to join out of their genuine passion for robotics, not because of it
getting them ahead in the rat race of college applications.
Since this year was the first year in which we lost a
substantial number of our teammates, we had to learn how to effectively
transfer knowledge. First, we were losing our master of 3D modelling, Max, so
we had two members, Abhi and Charlotte, learn under his wing throughout last
season. Because of that effort, they have now designed a variety of parts on
our robot. For the blog and engineering journal, Ethan learned under Lin’s
tutelage how to use Jekyll, Shopify, and manage the blog. This year, we face
difficulties, as we will lose our lead programmer, Tycho, for next season. To
combat that, our members Abhi and Janavi, are learning the intricacies of our codebase that we’ve kept since we first started using
Java.
Game Strategy
This year, we were faced with a conundrum. The central
question was this – “Should we focus on scoring the cryptoboxes, relic, or
jewel?”. We settled on the order of Cryptobox >
Relic > Jewel.
Our game strategy was based off of the fact that we could
build a robot which could score one block initially, and easily score a column,
giving us 40+ points right off the bat. As well, the cryptobox process is
simplistic enough that we could get to the balance stone to gain even more
points in the endgame, without doing any point-risky challenges such as the
Relic.
When we finish the cryptobox designs and autonomous, our
next goal is the Jewel. The Jewel challenge is simplistic enough that it could
be done in 1-2 meetings without interfering with any other design processes.
Our current planned design process is first to create an arm with a color
sensor attached like most teams, but eventually we plan to remove that color
sensor and identify the Jewel only by OpenCV.
Finally, our last area of focus is scoring the Relic. Scoring
the Relic involves a high degree of difficulty, and the risk grows when you
consider that you have to score the Relic upright in order to gain the most
points. As well, building an arm that can score the Relic while still staying
within the 18x18x18 size limits increases the design difficulty of the robot.
Building
This year, Iron Reign has drastically changed how it builds
its parts. In previous years, we have relied on primary Tetrix parts, utilizing
AndyMark parts for the drivetrain and other moving areas. However, we happened
to gain access to a motherlode of REV parts, which drastically changes our
designs from previous years.
The biggest change enabling innovation is our newfound use
of REV rails within our robot. REV rails allow for basically unlimited mount
points for parts so that we are afforded maximum flexibility in our designs,
comparable to the flexibility of 3D printing.
As well, for this year’s robot chassis, we have decided to
take the use of REV parts even further, and use the REV Power Distribution
Module and both Expansion Hubs. The reason for this change is twofold. First,
we experienced significant connection and static issues last year with our
robot, partially due to excess static buildup from our mecanum wheels. So far,
we have not experienced any of those issues using REV modules, even though we
are using the same base chassis. Second, the REV hubs allow us to add more
features on to our robot, such as LED strips and extra servos,
that allow us to signal our team as well as create more innovative
components of our robot.
We also utilize a variety of 3D printed parts on our robot.
While we use less 3D printed parts than previous years, that
is due to the particular challenges of this year. Our parts are modelled in PTC
Creo, and we have recently switched over from Creo V.3 to Creo V.4 so that we
can use the more advanced features included in the new program. Our personal 3D
printer can handle a variety of materials, and we have used nylon, ABS,
Filoflex, and Ninjaflex in prior designs to fit various needs. In our current robot,
we have settled on using nylon. Nylon has four qualities that make it more
advantageous than other materials. First, nylon is less brittle and prone to
breaking than materials such as ABS. Second, nylon achieves comparatively high
print quality on our robot as compared to Filoflex and Ninjaflex. Third, nylon
has enough give so that it doesn’t break, but is strong enough to withstand the
forces felt in everyday use of our robot. Finally, nylon can be dyed so that we
can give our parts a distinguishing color, a quality that we have taken
advantage of in prior seasons.
An example of these 3D printed parts are our wheel guards.
In testing, our mecanum drive train tended to cut up the cryptoboxes when we
drove up against them. As a result, we designed various wheel guards and tested
them. We also made mockups with various materials such as cardboard, to
minimize design time and waste parts. We settled on a U-shaped design to
prevent damage to the boxes and other field elements, while not sacrificing
mobility. Then, to guarantee nothing went wrong, we iterated through various
heights of the U-shape so that they would not cut into the mats or bump into
other robots
Programming
Iron Reign has generated a substantial codebase over the
years. Initially, Iron Reign programmed in RobotC. However, when robot phones
started becoming the main form of control, we transferred our
codebase into Java. We use the Android Studio IDE to code our robot.
Our most notable programming achievement has been the
integration of machine vision and augmented reality libraries into our code.
Currently, we use Vuforia in conjunction with OpenCV to identify and score
field elements in autonomous, as well as assist in scoring elements during
TeleOp. Both Vuforia and OpenCV are industrial-level technologies that we have
integrated into our codebase. Vuforia in particular is
currently owned by PTC, one of the sponsors of FIRST.
Another notable programming achievement is our Pose class.
We use the class to determine our robot’s current position on the field using
trigonometric functions. While this class currently need updating for the new
season, it can still be used for any small-scale operations on the field.
Design Process
Iron Reign uses two design processes in conjunction with
each other to create efficient and reliable parts. First, we use the Kaizen
design process, also used in industrial corporations such as Toyota. The
philosophy behind Kaizen is the idea of continual improvement, that there is
always some modification to each system on our robot that will make it more
efficient or more reliable. As well, design competitions are a focal point of
Iron Reign’s design process. In these design competitions, team members choose
their favored designs that all complete some field challenge, and build them
individually. Upon completion of each mechanism, the designs are tested against
each other, considering weight, maneuverability, reliability, and efficiency.
An example of these design processes working in conjunction
is the process of designing our cryptobox intake system. Evan had the idea to
build an arm-style grabber seen on many current competition robots. His design,
however, included shorter arms for space’s sake and a more compact lift system
than normal. Austin decided to build a unique conveyor-belt system which used
friction to hold blocks in space and move them vertically. Through the
competition, we determined that Evan’s design was more efficient and took up
less space than Austin, so we settle on his design, adding in a linear slide for
lifting at the end of the process. Then, Kaizen comes in. Through firsthand
experience in scrimmages, we learned that the grabber system isn’t as reliable
as we thought when first testing. So, we have designed a new grabber system
that moves like the arms did previously, but also rotate with soft spikes
attached to hold blocks with friction better without damaging them.
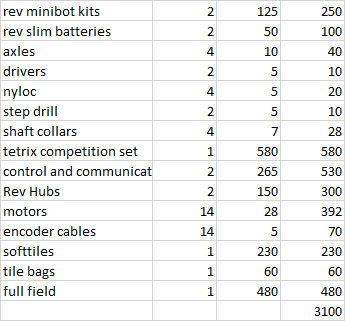
Budget
Bought:
|
REV Minibot Kit
|
2
|
125
|
250
|
|
REV Slim Batteries
|
2
|
50
|
100
|
|
Axles
|
4
|
10
|
40
|
|
Drivers
|
2
|
5
|
10
|
|
Nyloc Parts
|
4
|
5
|
20
|
|
Step Drill
|
2
|
5
|
10
|
|
Shaft Collars
|
4
|
7
|
28
|
|
Tetrix Competition Set
|
1
|
580
|
580
|
|
Control and Communication
|
2
|
265
|
530
|
|
REV Hubs
|
4
|
150
|
600
|
|
Motors
|
14
|
28
|
392
|
|
Encoder Cables
|
14
|
5
|
70
|
|
Soft Tiles
|
28
|
5
|
140
|
|
Tile Bags
|
2
|
60
|
120
|
|
Full Field
|
2
|
480
|
960
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Total
|
|
|
3850
|
Wishlist: