Over the past few weeks we have been working on getting V3 of our roller claw, now forever to be known as Speciminer, into working order. V2 of Speciminer worked well enough at intaking but could not eject or tell if we collected the correct sample color. Additionally, while V2 was sturdy enough, it likely would have failed in some capacity after just a few times of us using it for testing or practice....
Continued: Errors without Trials By Anuhya and Krish
Today, the debacle continued with V4 Sampler. While we were trying to finish up solving the problems that arose last time, we discovered that some of the solutions we'd come up with created a whole new set of problems.
New Problems:
New bridge for Sampler doesn't fit into sizing
Re-tensioning the intake belt shed light on old issues
Axon Broken Count - Infinity By Anuhya, Krish, Sol, Fernando, and Jai
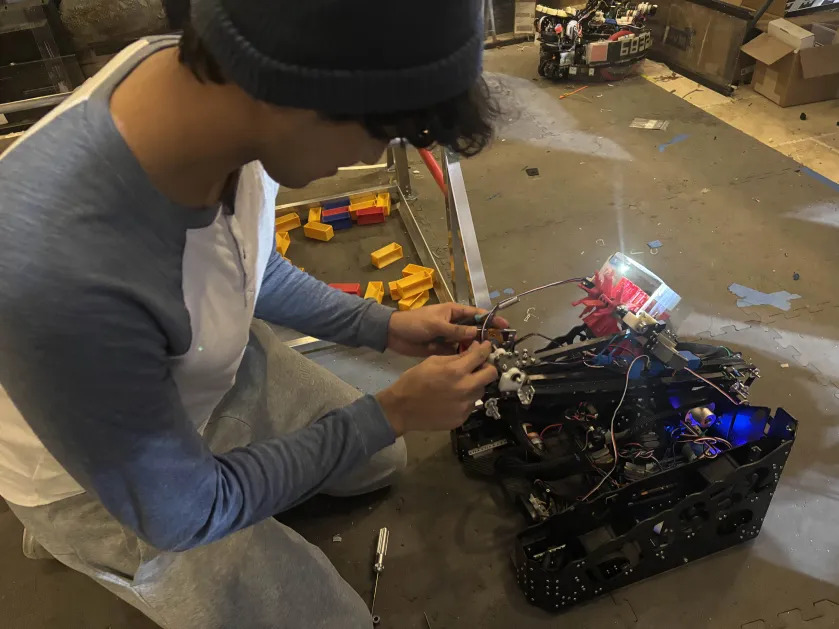
In Iron Reign's history, we've had many mishaps with our parts breaking, and the most notorious (and one of the most expensive) examples we've had are the numerous Axons we've broken. Krish, our main driver and one of our builders, holds the record with 5 (now 6!) broken servos, but today it was caught in 4K!
One of the difficulties in writing an autonomous program is the long development cycle. We have to unplug the robot controller, plug it into a computer, make a few changes to the code, recompile and download the code, and then retest our program. All this must be done over and over again, until the...
During Relic Recovery season, we had many problems with our autonomous due to slippage in the mecanum wheels and our need to align to the balancing stone, both of which created high error in our encoder feedback. To address this recurring issue, we searched for an alternative way to identify our position on the field. Upon researching online and discussing with other teams, we discovered an...
Autonomous Updates, Multiglyph Part 2 By Abhi, Karina, and Tycho
Task: Develop multiglyph for far Stone
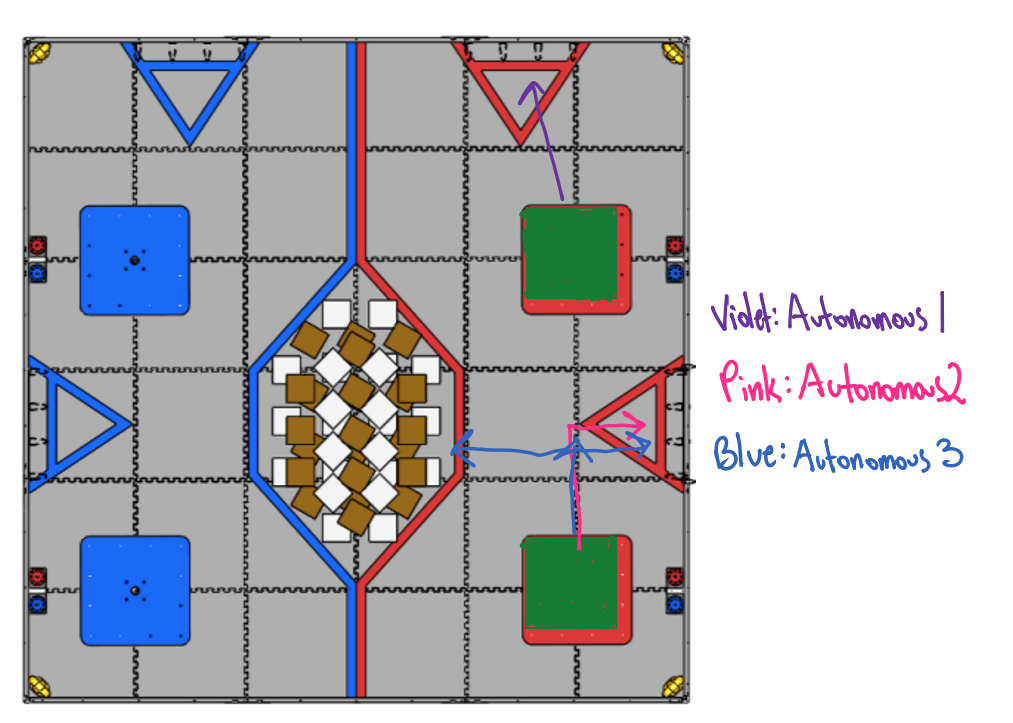
We had a functional autonomous for the balacing stone close to the audience. However, chances are that our alliance partner would want that same stone since they could get more glyphs during autonomous. This meant that we needed a multiglyph autonomous for the far balancing stone. We went on an adventure to make this happen.
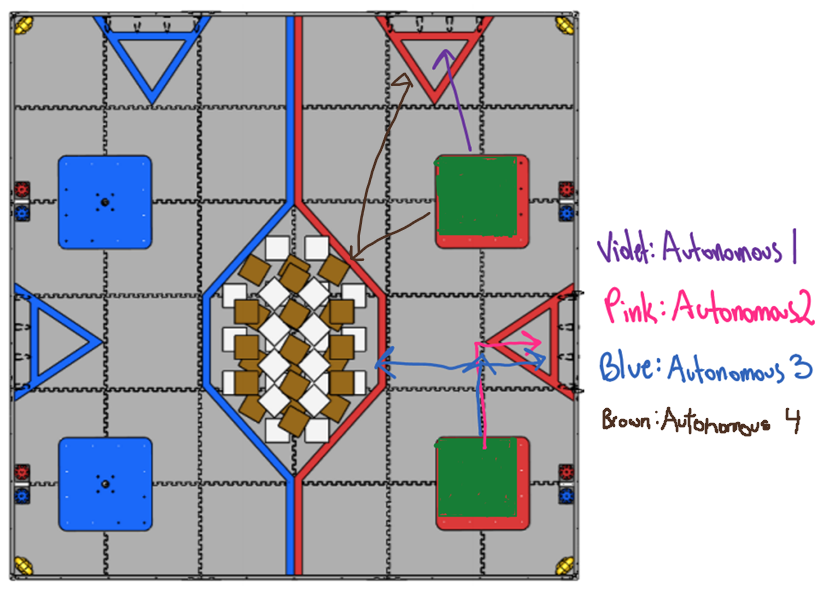
At super regionals, we saw all the good teams having multi glyph autonomi. In fact, Viperbots Hydra, the winning alliance captain, had a 3 glyph autonomous. I believed Iron Reign could get some of this 100 point autonomous action so I sat down to create a 2 glyph autonomous. We now have 3 autonomi, one of which is multiglyph.
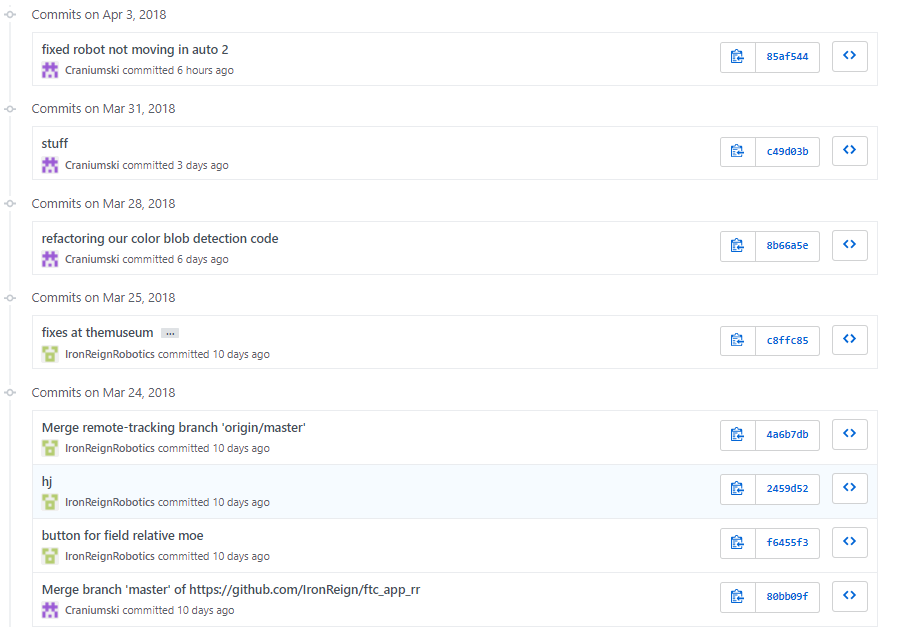
As explained in a previous post, we were having many issues with git commits and fixing our errors in it. After a lot of the merging conflicts, we had to fix all the commits without exactly knowing what was being changed in the code. Part of the reason this was so hard was our lack of good naming conventions. Though we always try to make a title and good...
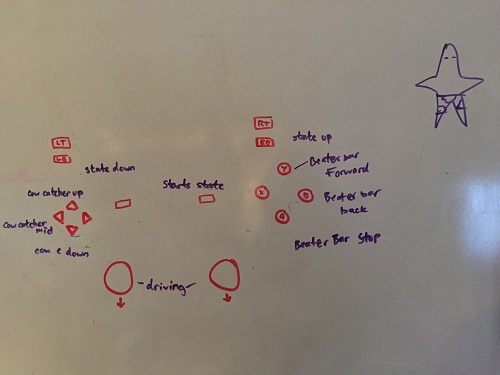
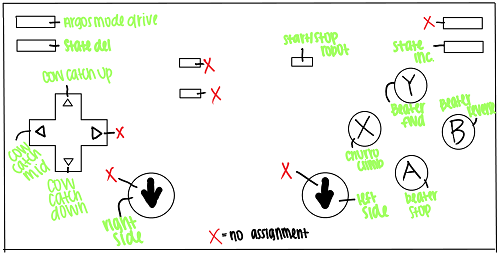
At this point, we are training the next generation of the drivers on our team, and since we have so many buttons with so many different functions it can often become difficult for the new drivers to determine which button does what, so Karina and I created a map of the controller. By doing this, we not only assist others in determining what button they need to press to do...
Task: Implement a drive system depending on field perspective
We are always looking for ways to make it easier to drive. One way to do that is to modify our code such that no matter where the front of the robot is, moving the joystick in a certain direction will move the entire robot in that direction. This allows our drivers to only think about the field and align with the cryptobox easier. I...
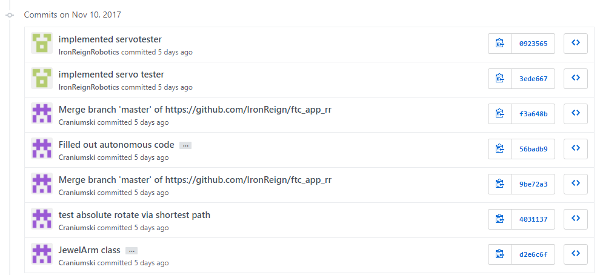
So, we can't include all the code changes we made today, but all of it involved cleaning up our code, removing extra functions we didn't use, refactoring, adding comments, and making it more readable for the tournament. We had almost 80k deletions and 80k additions. This marks a turning point in the readablity of our code so that less experienced team members can read it....
These commits allow better QoL for our drivers, allow our robot to function more smoothly both in autonomous and during TeleOp, allows us to score the jewels, and lets us test servos.
We attempted to create an autonomous for our first scrimmage. It aimed to make the robot to drive forward and drive into the safe zone. However, we forgot to align the robot and it failed at the scrimmage.
Instead of talking about the code like usual, the code's main functions are well documented so that any person can understand its functions without a prior knowledge of...
We’ve been using machine vision for a couple of years now and have a plan to use it in Relic Rescue for a number of things. I mostly haven’t gotten to it because college application deadlines have a higher priority for me this year. But since we already have experience with color blob tracking in OpenCV and Vuforia tracking, I hope this won’t be too difficult. We have 5 different things we want to try:
REV Robot Reveal By Tycho, Austin, Charlotte, Omar, Evan, and Janavi
Argos V2 - a REV Robot Reveal
This video was pulled from Argos visits to: The NSTA STEM Expo in Kissimmee FL, in the path of eclipse totality in Tennessee, and in North Texas at The Dallas Makerspace, The Southwest Center Mall, Southside on Lamar and the Frontiers of Flight Museum. We hope you find it interesting:
Task: Test and improve the PID system and balance code
We're currently testing code to give Argos a balancing system so that we can demo it. This is also a test for the PID in the new REV robotics expansion hubs, which we plan on switching to for this season if reliable. Example code is below.
Last year, we had some experience with OpenCV to press the beacons, and this year we decided to do the same. We use OpenCV to find the color we are looking for on the beacon in conjunction with Vuforia. First, it detects the search pattern in the view with vuforia, then isolates that area and finds the side of the beacon with the correct color. Our code is...
We use Vuforia and Open CV vision to autonomously drive our robot to the beacon and then click the button corresponding to our team's colour. We started this by getting the robot the recognize the image below the beacon and keep it within its line of vision. Vuforia is used by the phone's camera to inspect it's surroundings, and to locate target images. When images are located, Vuforia...
Inspire Award By Tycho, Jayesh, Lin, Omar, Max, Darshan, Evan, Ethan, Janavi, and Charlotte
1st Place at North Texas Regional Championship
Iron Reign members left to right are Ethan Helfman (Build, Communications), Janavi Chada (Programming, Communications), Tycho Virani (Programming Lead, Main Driver), Jayesh Sharma (Business Lead, Build, Communications), Darshan Patel (Build), Lin Rogers (Communications Lead, Logistics, Business) and Charlotte Leakey (Programming, Logistics), with Evan Daane (from BTW, Build, Photography) in repose. Not shown: Max Virani (Design Lead, Programming), Omar...
A year and a half ago while the new Android-based platform was still in pre-launch, we were the first team to share a machine vision testbed on the FTC Forums. That color-blog tracker was implemented with OpenCV on Android, but with a different low-level control system and robotics framework. Then we integrated OpenCV into our implementation of ftc_app, which was in turn based on the great...
This shows a test of our encoder issues. It might have been a month ago that we noticed a strange behavior in our autonomous code when the robot was moving forward at low speed. It would curve to the right when we were telling it to go straight. We probably would have noticed the problem...
Today, I combined the autonomous and teleop so that we can demo both more easily. As well, during testing, we now can switch between them seamlessly so that our testing is power. The most important part of this code is that we can configure the autonomous before we launch - telling the robot how many balls we have, how many to shoot, what side the robot is on, and...
Autonomous is one of the things that we tend to be weak on every year, and this year, we really want to get to super-regionals. So, to start off this year's autonomous, we first mapped out a potential path for the robot on the field. We then followed up with programming, using our previous methods like driveForward and driveCrab. So now, we have a basic autonomous program in which we can...
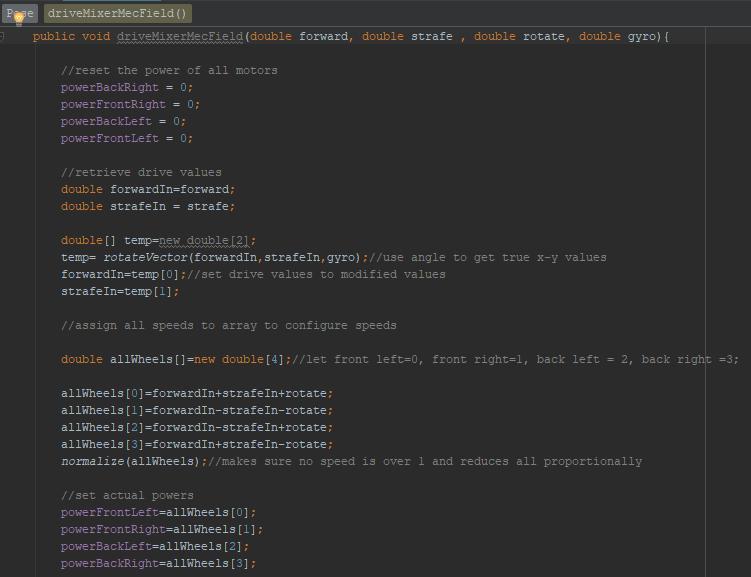
Today, I wrote the whole code for controlling our mecanum wheels. It is entirely fron scratch, and works perfectly right off the bat. This code allows us to strafe, move backwards and forwards, and rotate, in one method.
Reflections
We still have a lot of coding to do, as we're currently working on a particle-launching system. As well, we need to consider autonomous soon.
Programming our New Robot By Tycho, Lin, Ethan, and Jayesh
Task: Program our new mecanum wheel driving platform
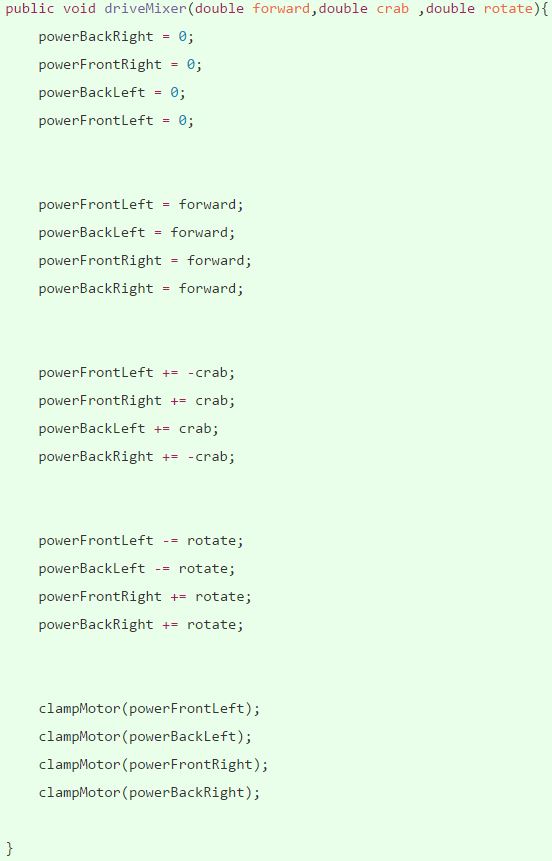
Now that our new robot has been built with a mecanum wheel platform, we can start write our drive code and figure out how to make our robot preform three basic motions: forwards and backwards, side-to-side and to rotate. We decided that, in order to get the best understanding of our robot,...
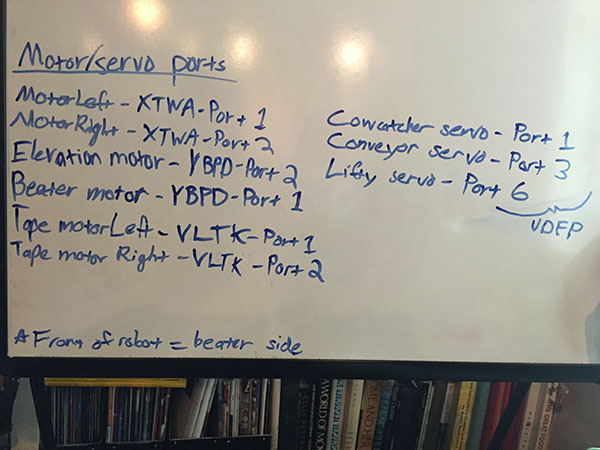
Task: Create a list of motors/servos and what ports they're connected to
Very often, when we disconnect a motor or servo (maybe on accident), we forget what port we got it from. This even happened to us today when we unplugged the servo that lifts the trough. Because of this hassle, we decided to write out a list of all the motors and servos on our robot and what...
A Presentation for the Ages By Ethan, Jayesh, Max, Tycho, Lin, Omar, Evan, Alisa
Task: Work on our presentation to the judges
Our main weakness in previous years had been our presentation. This year, we plan to change that. When our team was solely FLL, we practiced our presentations beforehand, so, we're applying that to this year. We've done 2-3 presentations so far and it seems it really helps us. As well, we're making a powerpoint presentation to assist us, giving us information we might forget and providing a visual...
Functions of our controller By Alisa, Ethan, Trace
Task: Listing out the functions of our game controller
In order to find a button for our argos mode drive, we made a rough draft of our game controller listing the functions of each button. For example, the 'X' button is for the churo climb, the 'A' button is for our beater to stop, etc. We had about 5 unused buttons so in the end, we decided on using the top left button for argos mode drive. Now that...
Task: Implement color blob detection on the robot for detecting beacons
Even though this was very long overdue, we now have a way to turn towards a certain color similar to what Argos does. What we're basically doing is calculating the angle that the robot is off-center of the blob it's tracking, and letting it correct for the error and straighten up with our PID code that's already in place. Right now, it doesn't actually move backwards and forwards, only turn on its axis,...
Scrimmage at Greenhill By Darshan, Alisa, Omar, Lin, Max, Tycho, Evan
Task: Practice with other teams and see
This past Friday, the team tried to get the robot working in a small scrimmage with seven or so other teams. At the scrimmage, we managed to get our cow-catcher working, even though we nearly burned out our servo. During the process of finding the right positioning and testing it while driving we managed to tear up quite a few rubber inserts on our treads. Even though the scrim was scheduled to...
Today we continued working on the code involved for the first ten seconds of motion in the tournament known as autonomous. In this period we hope to reach the other side of the field towards the Res-Q beacon to dump our figures from the beginning and then trying to go as high as we can up the mountain. We coded this using our IronDem and the Pose classes to calculate the range and angle of our current...
Task: To try out the robot in a competition setting
Last weekend Darshan and I tried to drive the robot in a small scrimmage with eight other teams. Even though we hit a few bumps along the competition we were able see how the robot drove and handled. We also saw what we could do easily and what was hard for us. Among the bumps was an incident involving a tread falling off the track because we hit...
Meeting other Teams at the Scrimmage By Lin, Omar, Darshan, Jayesh, Tycho, Max, Evan
Task: Get a feel for where we are and the progress of other teams
Whether or not we were allowed to compete, we felt that it would be worthwhile to go to the scrimmage, if only to see how we compared to other teams. Climbing the mountain is the hardest mechanical design challenge so far, and we were able to see their solutions.
Reflections
Many teams had treads like ours, with different arrangements of idlers, while...
Starting up our Autonomous Code by Jayesh, Tycho, Max
Task: Get started on autonomous coding
We spent some of the time at the scrimmage today starting up our autonomous code in android studio. The main basis of our coding was put around climbing the ramp, which is our main function of our robot without the rest of the hardware in place. The main point of the code was put around PID and Pose, as PID helped give us our position on the field and Pose helped in giving our heading.
Task: Create a rough draft of the code for the Pose class
Starting just a few weeks into the competition year, we thought up ideas for a system of classes to allow the robot to navigate to a location on the field on its own, including the Pose class, which we would use to keep tabs on where the robot was on the field at any particular time. With this, it would be possible to...
Coding for Autonomous Pilot Program By Tycho and Dylan
Task: Program Pilot Code
Our task was to begin programming for our first version of the Pilot class of the robot using other classes for our angle, position, and controller that we created. The controller class known as PID controller used part of the controller set given to us from the repository but was recalibrated to be in terms of time and independent of all else. This we need to integrate in our pilot class which we will use to tie all programs...
Before Scrimmage basic tests By Lin, Tycho, Omar, Max, Darshan
Task: make sure the robot can run
There's a scrimmage next Saturday that we may or may not be going to based on Dallasisd technicalities with our team. Our goals for today were to get a basic autonomous going to dump climbers and maybe some mountain climbing tests. However, the controller apps needed to be updated and we got a lot of errors when connecting.
Reflections
If the controller gives an error mentioning "USB UART" apparently the only fix is to...
Labor Day Meeting By Lin, Jayesh, Darshan, Alisa, Omar, Max, Tycho
Task: Learn about OpModes
Today, we reviewed opmodes in the FTC API and how to register new opmodes. We also learned about the differences between regular, linear and synchronous (from SwerveRobotics) opmodes.
Task: Review Blogs/Journal
Our Blog == our Journal. What we also did today was quickly review how to create blog entries so we can do that more frequently this year. We also tried to catch up on our lengthy backlog of journal articles. We were very busy...
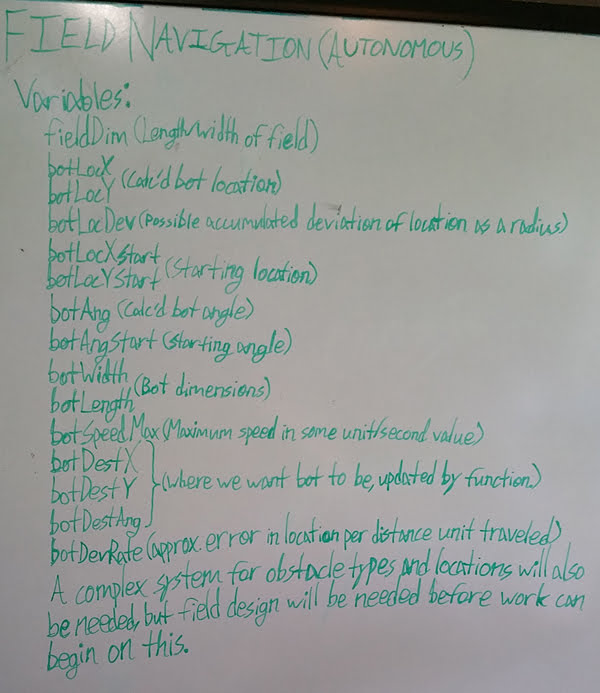
Task: Determine necessities of this year's field navigation code
Today was our very first meet of the year, and as such, not too much got done other than planning and experimentation. For the greater part of the meeting, I worked on concepts for an overhauled field navigation system (Mostly for autonomous, but possibly for tele-op as well). This would include the robot knowing where it is on the field when it starts, the field's and its own dimensions, the locations...
Overview of new hardware and software By Max,Tycho,Lin,Alisa,Ethan,Trace
Task: Getting a first glimpse at the new motors and controllers with Imperial robotics
We continued our meeting at the Dallas Makerspace after the GitHub tutorial. We unpackaged the new motors and motor controllers for the first time and took out the phones to scan the hardware configuration. We added Anderson Power poles to some of the motors. Lin taught Alisa and Ethan how to crimp wires and attach the power poles.
Reflections
Scanning the hardware configuration was very troublesome...
PID is useful in many ways, such as setting an arm to a certain position, going straight based on a gyro or following a line. There are three parts to a PID control program : Proportional, Integral and Derivative.
Proportional: How much error is there? The proportional part of PID is useful because it tells you how far away you are from your target value, so you know how fast you should go to correct it.