RIP FTC 2016
Task: Review the events that occurred at the FTC Regional Championship
Iron Reign had a fairly successful run at our regional tourament, much more so compared to last year. Despite reaching the semi-finals, we were unable to advance past the competition to super-regionals. We had many strengths of ours shown through the day, but also committed errors that inevitably caused our loss at the end. At the judges meeting, we did a decent job of eplaining our value as a team to the judges but committed a huge error in not showing demonstrations on our robot and videos over its functions. This made our presentation have less of an impact in that the points we were making had no empirical vale because there were no real world examples to what we were saying that the judges could see. We were pretty successful in the robot game, holding the first position in the rankings for the majority of the tournament. Going into our third match, a weird error caused our robot to not transfer power from the battery to the robot system and disqualified us from the game. In our last match the error persisted and didn't allow us to climb the mountain, which was our main source of points and we ended up outside of the top four teams. In the selection of alliance partners, we were wanted by the first and second place alliances for second pick but were picked up by the fourth place alliance first pick. Through our match with the first place alliance, we lost by a small margin and our other partner with our alliance captain were blown out in the second match, taking us out of the tournament.
Reflections
We had much more success in our regional tournament this year compared to last year, but our luck wasn't with us this year as a few small errors prevented us from moving on to super-regionals. We now look forward to the UIL tournament and will continue holding practices to prepare for that competition in the summer. Some errors we must look at are in ensuring the prevention of random errors in the robot for the game and tightening up our presentation to both convey our team value and provide real-world example to the judges to help connect the two aspects of the team. This will give us a much better chance to succeed in both the robot game, both scoring blocks and climbing the ramp, and help show the judges how are team works and has overall strength compared to other teams. Learning from our mistakes at regionals, we will grow and look to have great success at UIL.














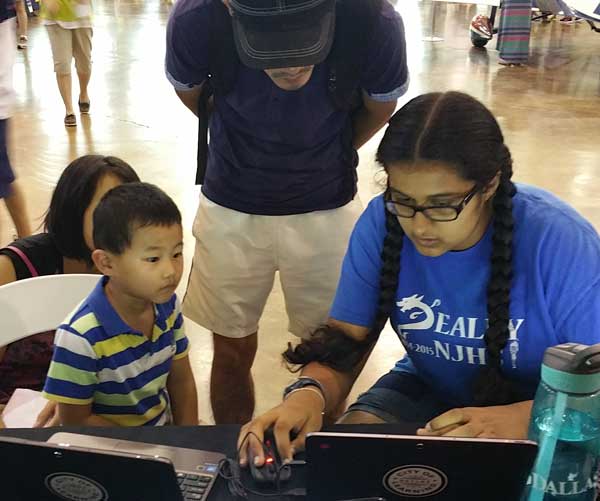 On board Max managed the bank of four 3D printers while Tycho and Austin taught kids to build virtual structures on our Minecraft server with the education version of the software.
On board Max managed the bank of four 3D printers while Tycho and Austin taught kids to build virtual structures on our Minecraft server with the education version of the software.





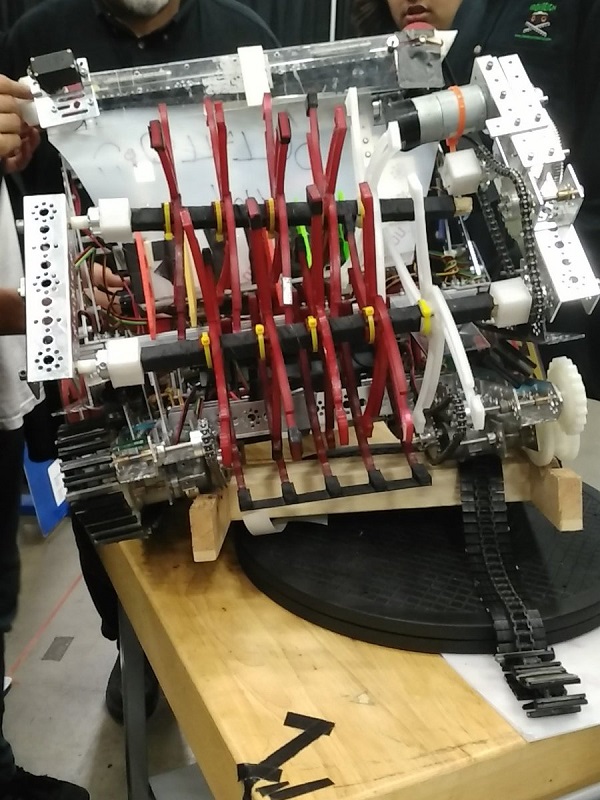

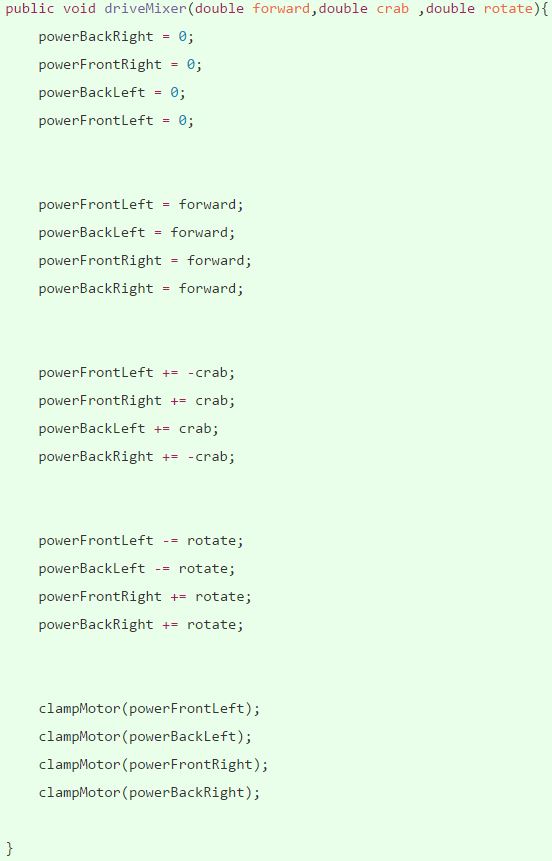
 The cool thing about these wheels is that they enable you to strafe side to side, instead of turning. However, they do require different coding than our normal wheels.
The cool thing about these wheels is that they enable you to strafe side to side, instead of turning. However, they do require different coding than our normal wheels.
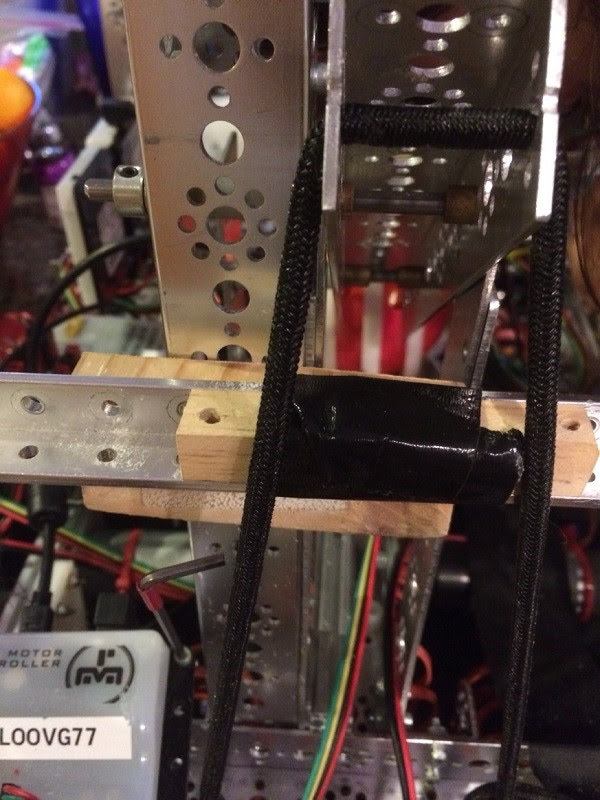
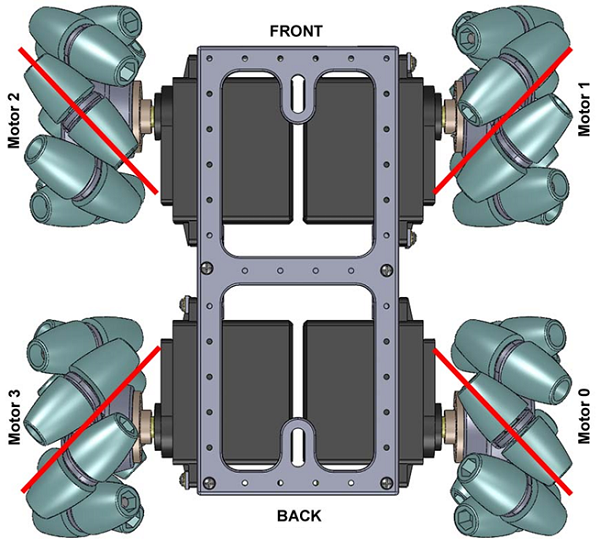 This is important, because if these wheels are not pointing in the proper direction, then the rollers will begin to fight against each other, causing strange driving patterns that aren't very useful. We learned this the hard way, because when reconstructing the wheel mounts, the positions of two wheels on robot were flipped, causing the robot to drive in circles when we tried to drive sideways.
This is important, because if these wheels are not pointing in the proper direction, then the rollers will begin to fight against each other, causing strange driving patterns that aren't very useful. We learned this the hard way, because when reconstructing the wheel mounts, the positions of two wheels on robot were flipped, causing the robot to drive in circles when we tried to drive sideways.
 However, moving side to side is not really intuitive compared to the others. In order to move side to side, the wheels on either side have to move opposite of each other. For example, if I wanted to, from a top-down perspective, drive to the right, the wheels on the left side of the robot would have to drive away from each other, while the wheels on the right side of the robot would have to drive towards each other. The rollers start spinning away from the center and to the right on the left side of the robot, or towards the center and to the right for the right side of the robot. The forwards and backwards components of the wheels and the rollers cancel each other out, and the robot moves to the right.
However, moving side to side is not really intuitive compared to the others. In order to move side to side, the wheels on either side have to move opposite of each other. For example, if I wanted to, from a top-down perspective, drive to the right, the wheels on the left side of the robot would have to drive away from each other, while the wheels on the right side of the robot would have to drive towards each other. The rollers start spinning away from the center and to the right on the left side of the robot, or towards the center and to the right for the right side of the robot. The forwards and backwards components of the wheels and the rollers cancel each other out, and the robot moves to the right.

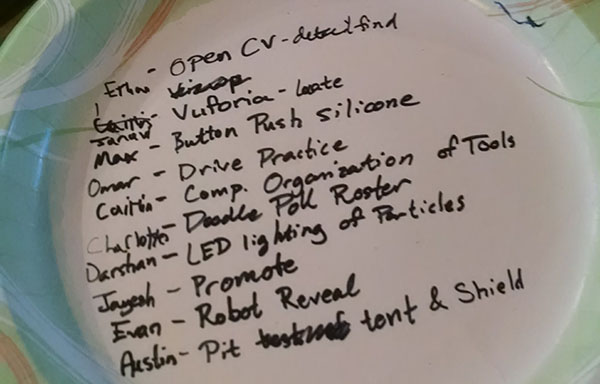
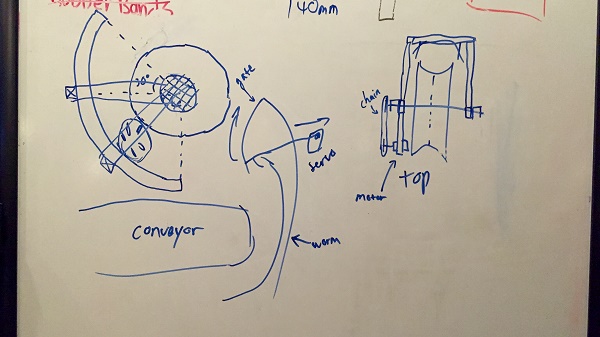
 (herecomedatbowl.jpg)
(herecomedatbowl.jpg)





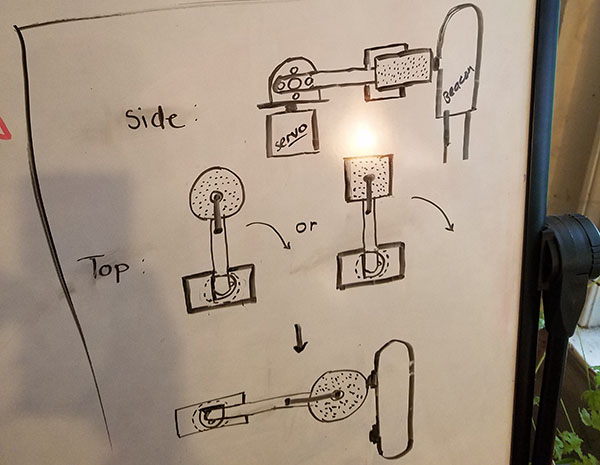



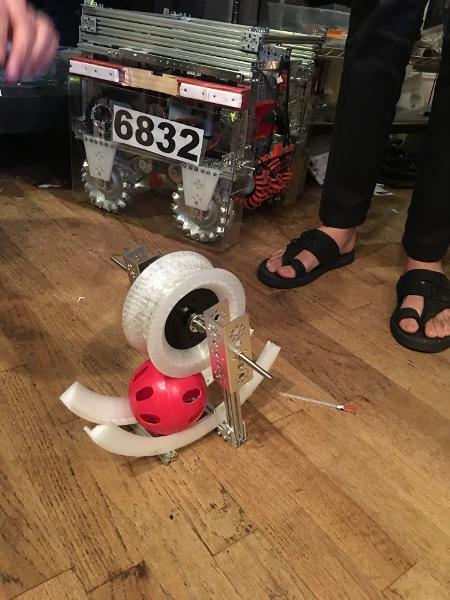
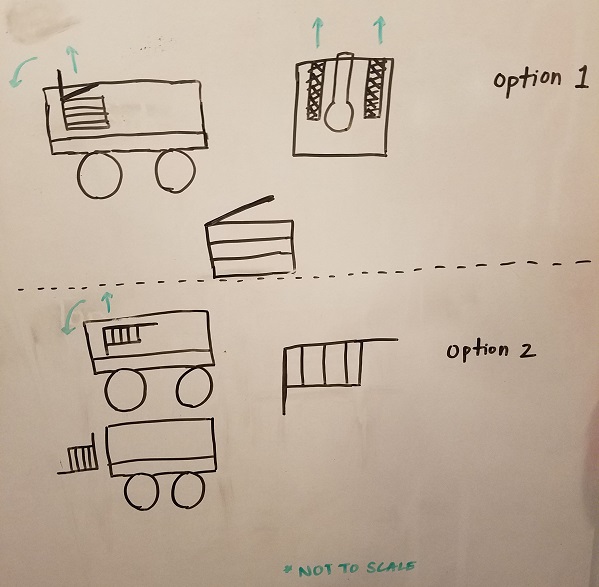 (We went with a mix of both)
(We went with a mix of both)

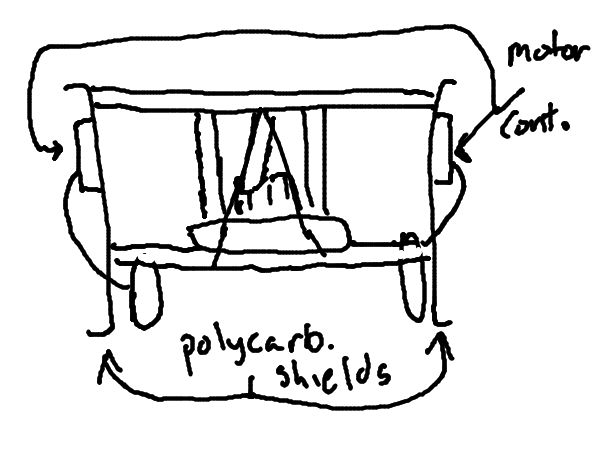





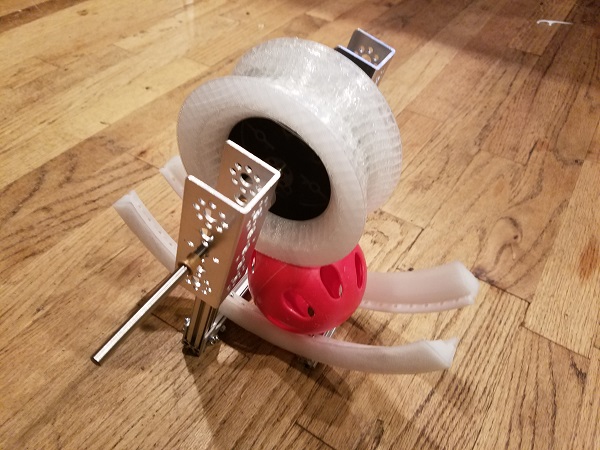

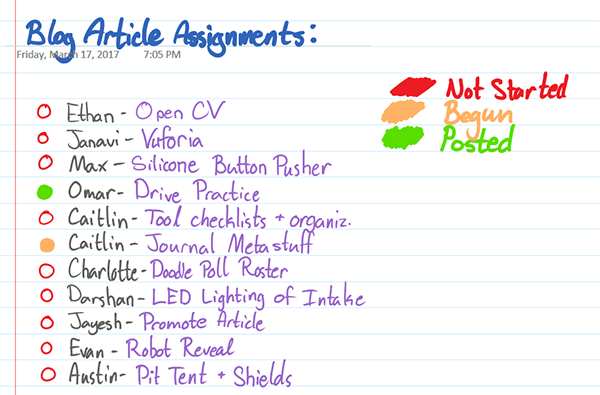
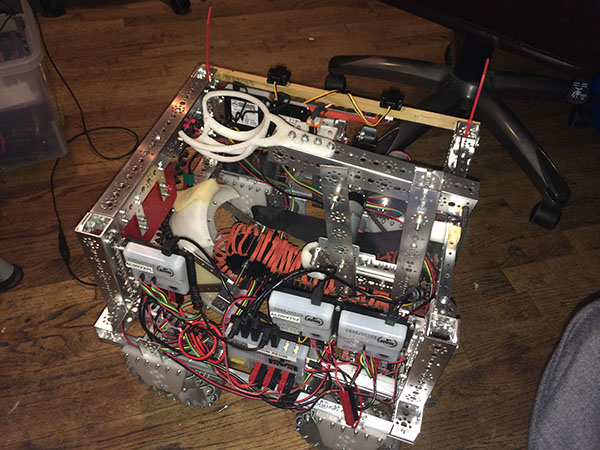
 (there's a picture of it here kbye)
(there's a picture of it here kbye)
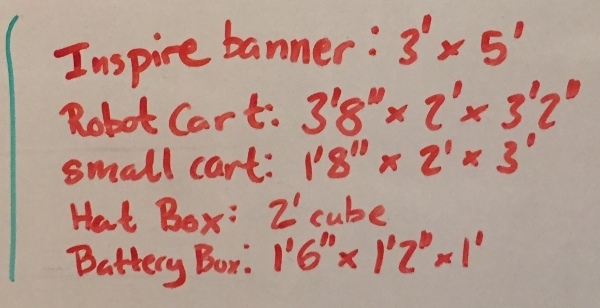
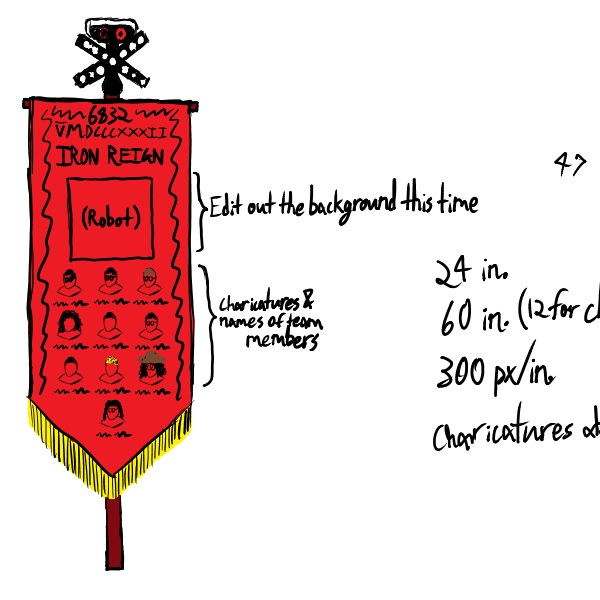
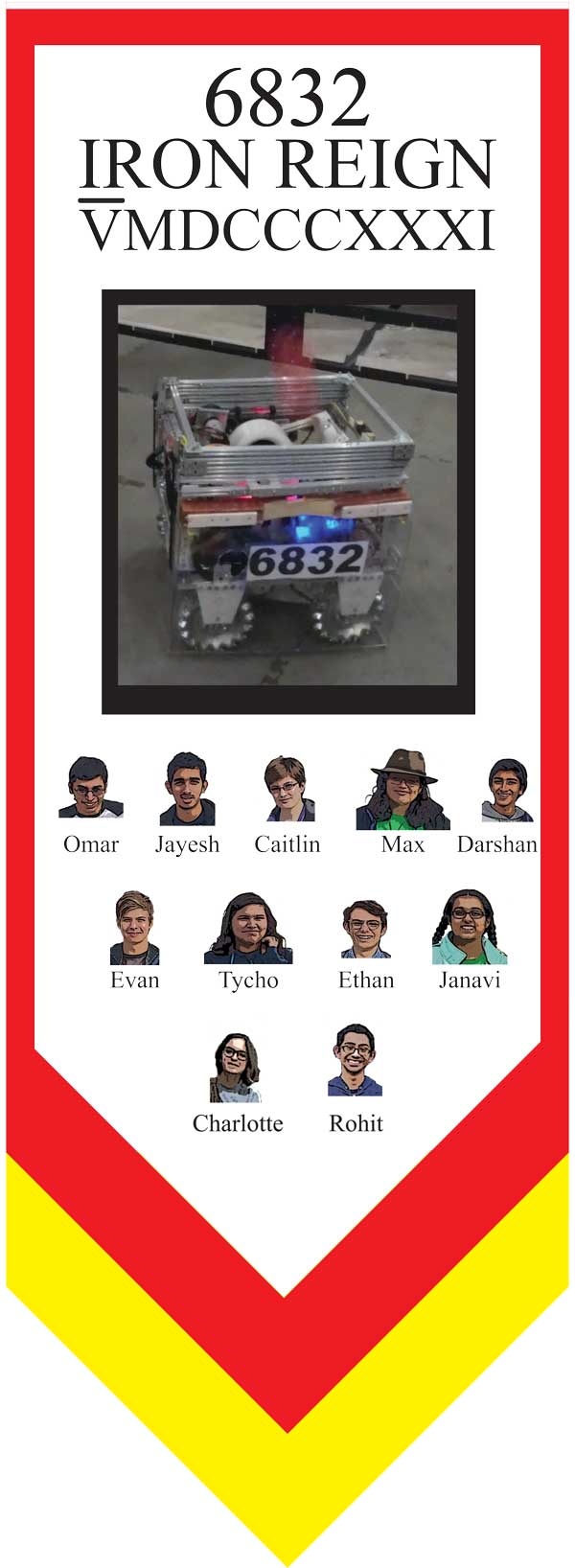 (aw dayum that's a bootyful banner if i do say so myself)
(aw dayum that's a bootyful banner if i do say so myself)