Post Kickoff Meeting September 08, 2018
By Karina, Charlotte, Ethan, Evan, Kenna, and Abhi
Meeting Log September 08, 2018

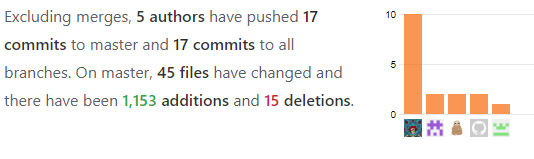
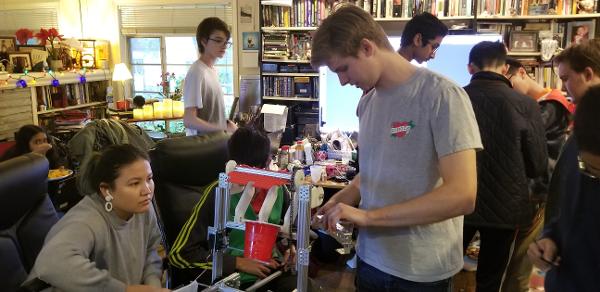
Today Iron Reign attended the FTC 2018-2019 season kickoff at Williams High School. After the event, we gathered back at our coach's house to talk about how we might approach this season's challenge. We welcomed prospect team members as well. They joined us in reviewing the reveal video and the games manuals.
Today's Meet Objectives
We wanted to have an understanding of the game design so that we could start going over robot designs. To do this we:
- Watched the reveal video
- Skimmed through game manual 1 and the preview of game manual 2
Until we receive the field elements, we will have to plan and strategize using the resources listed above.
Because we also had new possible team members over, we set expectations for this year. Actively recording our progress and blogging for the engineering journal was heavily stressed. We recognize the importance of having a good engineering journal and how it can help us advance. Our coach's house, the place where we have our meetings, is also cleaner than it has been in a long time after an intense cleaning session. Having an organized space maximizes efficiency, especially with the a larger team. Therefore, we expect for all team members to clean up after themselves and maintain the organization.
Before we could discuss robot build ideas, we talked strategy. Parking in the crater and the landing zones will undoubtedly be easy to do. Since we know that designing a way for our robot to be able to lift itself onto the lander will be a more interesting challenge and will score us the most points, we will prioritize working on prototypes mechanisms for this task. Finding a way to gently lower down form the lander may be difficult. We will have to consider ways to not damage the robot, wiring, etc. We also agreed that it would make the most sense to have one mechanism that latches onto the hook on the lander, grabs gold and silver elements from the crater, and places these elements into the columns.
Other topics we talked about include drive trains, problems with trying to create a mechanism that grab both the silver balls and gold blocks, as well as how we would be able to grab them out of the crater without going over the edge of the crater and getting stuck.
Also, in previous seasons, we have had strong autonomous game, and so we decided to make the tasks in autonomous another top priority. We had our coders start discussing the field path for autonomous. Unfortunately, we will not be able to launch our team marker into the team depot.
After the end of last season, a storm passed through and turned over shelves, trashing the robo-dojo. Some of our team members cleaned up the tent this afternoon. While it may not seem very important at the moment, this will be very helpful later in the season once we get our field elements for this year's challenge and want to set the field up. While cleaning, they also uncovered old, rusted metal tools and and pieces, which we will now be able to repair and save for future use.
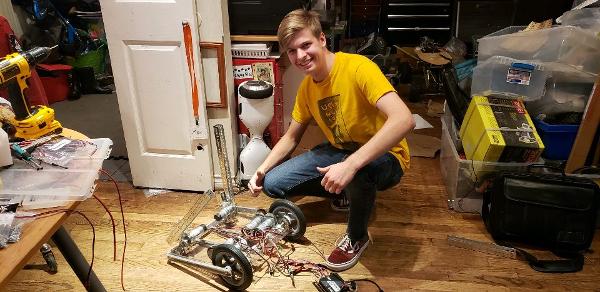
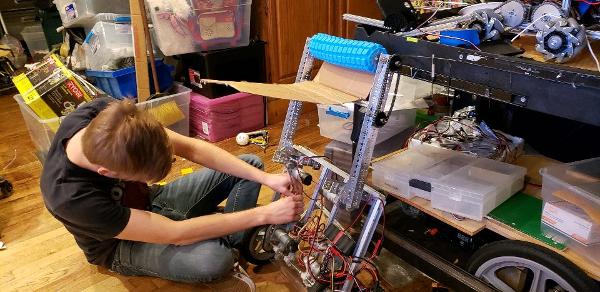
Besides helping with cleaning the tent, the new members showed a lot of interest in the game as well. They were eager to start building, and actually started creating prototype mechanisms for picking up the silver and gold elements.
Today's Work Log
| Team Members | Task | Start Time | Duration |
| Karina | Working on blog | 2:00 | 4 hrs |
| Abhi | Autonomous planning | 2:00 | 4 hrs |
| Evan | Robot brainstorming | 2:00 | 4 hrs |
| Charlotte | Robot brainstorming | 2:00 | 4 hrs |
| Ethan | Working on blog | 2:00 | 4 hrs |
| Kenna | Cleaning tent | 2:00 | 4 hrs |


























 Then we realized a more pressing issue. Since torque is equal to force * arm length (T=FR), and the force on our robot is only the force due to gravity (F=mg), we had a torque on the lift equal to T=mgR. Then, as the lift was mounted at the very end, the torque on the arm was at its absolute maximum. And, while we're confident in our building ability, we're not that confident. So, we realized that we'd have to move the lift closer to the middle to minimize torque.
Then we realized a more pressing issue. Since torque is equal to force * arm length (T=FR), and the force on our robot is only the force due to gravity (F=mg), we had a torque on the lift equal to T=mgR. Then, as the lift was mounted at the very end, the torque on the arm was at its absolute maximum. And, while we're confident in our building ability, we're not that confident. So, we realized that we'd have to move the lift closer to the middle to minimize torque.










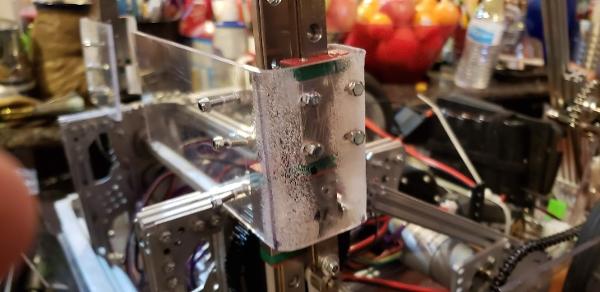















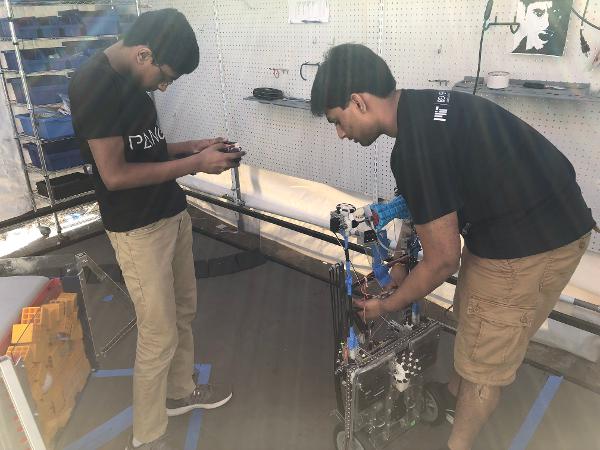
 Karina, Justin, and Jose practiced driving the robot. We discovered that the robot latches extremely well with the new hook and that the autonomous delatch works. We also tested the articulation, or poses, of our robot. The only issue that popped up was when the robot moves into deposit mode, it tips toward the side with linear slides, but Karina discovered that if she drives the robot forward at the same time, she can ram the robot into the correct position. Karina got to 4-5 cycles per match with the new updates. This practice was a way to test the strength of our robt - we've had our robot break under stressful situations previously - and this time nothing broke. The biggest issue was that a servo wire on our intake came unplugged, but even with that, our robot still worked.
Karina, Justin, and Jose practiced driving the robot. We discovered that the robot latches extremely well with the new hook and that the autonomous delatch works. We also tested the articulation, or poses, of our robot. The only issue that popped up was when the robot moves into deposit mode, it tips toward the side with linear slides, but Karina discovered that if she drives the robot forward at the same time, she can ram the robot into the correct position. Karina got to 4-5 cycles per match with the new updates. This practice was a way to test the strength of our robt - we've had our robot break under stressful situations previously - and this time nothing broke. The biggest issue was that a servo wire on our intake came unplugged, but even with that, our robot still worked.
 We finished the light-up LED hat.
We finished the light-up LED hat.
 Arjun continued writing the Control Award submission, adding in the new articulations and poses of the driver enhancements. Janavi created state diagrams for the code to add to the submission.
Arjun continued writing the Control Award submission, adding in the new articulations and poses of the driver enhancements. Janavi created state diagrams for the code to add to the submission.