Semi Regionals SWOT Analysis By Fernando, Nalin, Pavit, Anda, Elm, and David
At Semi Regionals, we earned the 2nd place Inspire Award and were the 6th and final team from the tournament to advance to regionals. Soon after the tournament, the team conducted an in-depth analysis of every match we played in as well as judging and overall observations. All of the key points we discussed are boiled down in the SWOT analysis below.
After LM2, the SCORPIUS code was fully revamped to improve structure and performance. However, due to limited time before LM3, we weren’t able to fine-tune our auton and driver controls, so we couldn’t use our code to its full potential.
One of the main challenges during LM3 was that the third ball consistently undershot. To address this, we developed an equation to calculate the necessary launch speed from different field positions...
U^2 League Tournamnet SWOT By Fernando, Nalin, Pavit, Anda, Elm, David, Alyssa, and Nirjha
Following the U^2 Tournament, we conducted a comprehensive SWOT analysis to evaluate progress and identify our next steps. With us barely advancing to Semi-Regionals, this analysis reveals both significant improvements and persistent challenges that will shape our strategy heading into competition.
Strengths
9 Artifact Auto: Refining our autonomous routine from scoring six artifacts to scoring nine artifacts was crucial for our team's...
League Meet 3 SWOT Analysis By Elm, Anda, David, Fernando, Pavit, Nirjha, and Nalin
Following League Meet Three, we conducted our comprehensive SWOT analysis to evaluate progress from Meet Two and identify our next steps forward. This analysis reveals both significant improvements and persistent challenges that will shape our strategy heading into the league tournament.
Strengths:
Enhanced Intake Efficiency: The addition of the right wing has greatly improved our intake performance. Artifacts now enter the...
League Meet 3 By Elm, Nirjha, Anda, Fernando, David, Pavit, and Nalin
Today we competed in our 3rd and final league meet of the season. While we ended the day with a 2-4 record, the matches revealed critical technical issues that need immediate attention before the league tournament.
Match 1: 30-54
Partnering with our sister team 3734 against 31792 & 28144, we faced immediate technical challenges. Our robot failed to start...
After our first league meet, we identified the shooting system as a major bottleneck. Watching match footage revealed how much time we lost with the manual, single-ball operation. Our drivers were constantly managing button presses while trying to navigate and position the robot, creating unnecessary pressure during critical scoring moments. We decided to overhaul the system to make it faster and more autonomous.
The new sequence activates the flywheel and uses...
V2 of our launcher has proven to be significantly better than v1. The main difference between the two being the switch over to using Rimfire (v3 of our flywheel) on v2 of the launcher. Make sure to check out our blogpost on Rimfire in order to learn more about what we changed in regards to that. Initially, we started off by using the exact same launcher structure as v1,...
League Meet 2 SWOT Analysis By Elm, Anda, David, Fernando, Alyssa, Pavit, Nirjha, and Nalin
Following League Meet Two, we conducted a comprehensive SWOT (Strengths, Weaknesses, Opportunities, Threats) analysis to guide our strategic planning. This analysis combines performance data and technical observations to help create a roadmap for improvement.
Strengths:
Autonomous Performance: Our autonomous routine has become a significant advantage. Consistently scoring 2-3 artifacts before leaving the shooting zone gives us a strong foundation in...
League Meet 2 By Elm, Anda, Fernando, Pavit, and Nalin
After a challenging first league meet, we returned with renewed focus and determination. Our second competition showed marked improvement with a 4-2 record, demonstrating that the lessons learned from Meet One were paying off.
Match 1: 95-24
Partnering with 23778 against blue alliance 30461 and 23913, we started strong. Our autonomous routine executed smoothly, scoring two purples and a green in the opening seconds before leaving...
League Meet 1 By Elm, Anda, David, Fernando, Alyssa, Pavit, Nirjha, and Nalin
Our first league meet of the season proved to be an intense learning experience for our team. Competing in five matches, we walked away with a 1-4 record, but more importantly, we gained crucial insights that will shape our improvements moving forward.
Match 1: 38-5
We secured our only win of the day, though it came with a 30-point penalty awarded to...
Our first iteration of the shooting system was designed around driver-controlled, single-ball operation. Each time the driver wanted to fire a ball, they had to press the shooting button to initiate the sequence. This approach gave us precise control over when balls were fired, but it placed significant demands on the driver during matches.
When the button was pressed, the flywheel motor would spin up to launch speed. Once ready, the...
Learning to Use the CNC Machine By Pavit, Anda, and Fernando
Over the past few meetings, we taught one of our team members how to use the CNC machine. Here is his experience with it and some of the challenges he encountered:
Learning to use our CNC machine wasn’t exactly a smooth process. In fact, it started with some confusion, the fear of damaging thousands of dollars' worth of equipment, and a whole lot of...
We’ve made some crucial updates to our flywheel design, resulting in a much-needed boost in power. This iteration, named Rimfire, builds upon lessons learned from our previous versions and focuses on improving rigidity, airflow, and traction to create a more efficient and powerful launcher.
One of the biggest overhauls was to the disks of the flywheel themselves. The T-tires were made larger and more substantial, which required a...
This is v1 of our actual launcher. With this iteration we’ve moved away from the large testing rig and over to a smaller and more standard launcher design/formfactor. Since we are still in the testing phase we’re continuing the use of MDF due to it being cheap and easy to manufacture with. For large parts that are highly subject to change we’re using PLA. Testing from our v0 launcher,...
Since designing, building, and testing the first iteration of our flywheel, we’ve made some minor but important changes to the design. These changes resulted in the flywheel being capable of launching with enough power. While the results are satisfactory, we will continue to improve and experiment on this design as well as possibly test different flywheel concepts entirely.
The major difference between v1 and v2 are the flaps that...
Desmos Flywheel Projectile Calculator By David, Nalin, Fernando, and Anda
When building a flywheel launcher, understanding the physics is essential. Our Desmos-based trajectory simulator helps us model and test different launch scenarios using kinematic equations.
At the core of the simulator is the projectile motion equation: y = x·tan(θ) - (g·x²)/(2(v·cos(θ))²). This combines horizontal and vertical motion into one formula. The x·tan(θ) term represents the initial upward direction of the launch, the second term accounts...
There have been several strides on the code end this season including coding Auton and shifting to using a Limelight camera. Autonomous wise, we had a good start in the beginning of the season, since it was very reliable during meet one. In our first meet we were able to score a preloaded sample to the low basket consistently. Since then, we have started coding Auton so the robot can score...
League Meet 2 Post-Mortem By Ren, Aarav, Nalin, Fernando, Jai, Krish, Sol, Georgia, Anuhya, and Elias
Task: Analyze our League Meet 2 Performance
After every competition, the team sits down and runs a SWOT(Strengths, Weaknesses, Opportunities, Threats) analysis on the robot and its performance. Here is a breakdown of everything we learned using the SWOT technique after League Meet 2.
Strengths:
In our conversation, everyone could agree our key strength was the structure of our linear slide. Earlier...
How To: Making a Printable Template from a Sketch in Fusion 360 By Anuhya
After some trial and error, this is the most convenient way I've found to convert .dxf files to easily printable files with a level of control over how it prints. It requires the use of Inkscape, which is a free-to-download, free-to-use vector-based software.
Design a sketch with the measurements you want. The measurements should be to scale...
Task: Create a reliable intake system for the Submersible
We developed an intake system using a 3D printed beater bar out of ninjaflex. The beater bar is used to pull the sample onto the platform. We used clear 1 mm polycarb to form the walls of intake. The walls curve slightly allowing samples faced in many angles to correctly position itself to enter the intake via the beater bars....
League Meet 1 Post-Mortem By Ren, Aarav, Nalin, Fernando, Jai, Krish, Sol, and Georgia
Task: Analyze our League Meet 1 Performance
After every competition, the team sits down and runs a SWOT(Strengths, Weaknesses, Opportunities, Threats) analysis on the robot and its performance. Here is a breakdown of everything we learned using the SWOT technique after League Meet 1.
Strengths:
One of the biggest strengths that our robot has was auton reliability. In every single match we played, the...
11/6/24 Meeting Log By Fernando, Sol, Aarav, Nalin, and Anuhya
Task: Build and CAD Progress for Meet 1
Today, we experimented with a potential lift mechanism, refining ideas to improve its functionality and stability. Additionally, we worked on upgrading an older swerve drive module so it can meet the latest requirements of our design.
A big milestone was achieved with our new joint for the robot’s elbow, which we call the "Axle Oreo." The team retrieved parts, assembled...
We’ve made progress on the 2nd version (V2) of the roller claw that is more structurally sound and has an improved intake. To improve the structural stability we added a second standoff between the plates of the claw halves to stop them from twisting while intaking. Additionally, we added a large pyramidal structure in the center of the claw in order to help align samples during intake....
10/26/24 Meeting Log By Krish, Fernando, Nalin, Aarav, and Jai
Task: Making Changes Based on Scrimmage Performance
Today was packed with advancements and challenges. We drilled and attached the intake mechanism onto the arm and completed the real wiring for the arm, marking an essential step forward in functionality. Although we faced some issues with the protective sleeve, we tied it up temporarily, and once the sleeve is in place, the setup will be complete.
Full Moon Scrimmage 10/19 By Anuhya, Nalin, Krish, Fernando, Jai, Tanvi, Ren, and Aarav
Task: Analyze our performance at the Full Moon Scrimmage
Today, Iron Reign attended the annual Full Moon Scrimmage hosted by Marcus High School. We competed in two matches and won both, but they were primarily due to our alliance partners since we faced lots of problems with our robot.
The biggest issue we faced was our wiring management. Since our...
10/16/24 Meeting Log By Anuhya, Ren, Elias, Jai, Sol, and Aarav
Task: Scrimmage Preparation
Today brought exciting progress on both robotics and jewelry fronts. On the jewelry side, we transformed all current charm designs into silver earrings, creating a complete set of each design.
In terms of code, we made more progress with Limelight, focusing on translating pose data from the Limelight to the robot. We also consulted the FTC Discord for additional insights. For our ongoing bridge...
Today we built a proof of concept for a roller claw concept that we came up with. This claw took inspiration from a passive rubber band pincer gripper designed by a team on the unofficial FTC Discord server. It also took inspiration from a previous roller/beater intake designed by Iron Reign for the Relic Recovery season (see below).
10/12/24 Meeting Log By Nalin, Tanvi, Fernando, Jai, Krish, Sol, and Aarav
Task: Scrimmage Preparation
This week, the team had both portfolio development and robot improvements. The Ideas Festival (previously known as Robot in Two Days) portfolio slide was completed, and a recent Lilly meeting was added to the Connect portion, along with a dedicated blog post.
On the build side, progress included attaching the power switch, adding a physical stop for the hinge, and making minor tweaks...
10/5/24 Meeting Log By Nalin, Anuhya, Ren, Fernando, Aarav, and Jai
Task: Refine Intake for the Early Qualifier
This week, the team made significant progress on multiple fronts. On the portfolio side, members worked on slides focusing on team organization, financial management, and sustainability of skills. Jewelry project images were organized and refined, and an Instagram post was prepared for the Jewelry. Additionally, an earring order form and website layout were created to expand our online presence.
10/2/24 Meeting Log By Nalin, Elias, Sol, and Aarav
Task: Work on Integrating Limelight and Build the Linear Slide
Today saw a creative leap forward with a prototype for an A-frame and pulley system, designed to rotate the linear slide from a parallel to a perpendicular position relative to the ground. Though the design is still rough, it’s an important first draft to explore the concept. Plans are underway to improve the bridge-to-A-frame connection, potentially using a Ninjaflex hinge or...
9/28/24 Meeting Log By Nalin, Krish, Elias, Anuhya, Sol, Fernando, Jai, and Aarav
Task: Make Progress in Prepreation for the Early Qualifier
Today, the team made substantial progress both in building and portfolio development. We began working on the Ideas Festival page (previously known as Robot in Two Days) and brainstormed fresh ideas to enhance our portfolio. We also engaged with new team members about outreach strategies and portfolio improvements. To boost our presence, a new Instagram post was created,...
9/21/24 Meeting Log By Nalin, Anuhya, Ren, Sol, Fernando, and Elias
Today, Anuhya started modeling the full bridge and then moved on to designing the plate that attaches to the bridge structure. The next steps will be refining the attachment to ensure it integrates seamlessly with the rest of the design.
Nalin and Ren filled up two Motivate pages in the portfolio in preparation for the Early Qualifier. They also took photos for our upcoming jewelry catalog and shared...
Robot in 2 Days Gripper By Anuhya, Sol, and Fernando
One major component of the intake system we designed during robot in two days was a pincer gripper claw. Attached to a linear slide outtake, there is a claw with two separate 3-d printed parts that pinches the specimen. This design worked fairly well and it effectively secures the samples. The second part to the intake system was a beater-bar to intake the samples from the field....
Robot in 2 Days Chassis By Aarav, Anuhya, Sol, and Fernando
Robot in two days (Ri2D) is an ideation process Iron Reign goes through to explore the new seasons and brainstorm designs and ideas for the game. One key aspect of this year's robot in two days was the chassis. A part of the chassis included was the system too ascent onto the first level, so we repurposed the Skyhooks from last year's Center Stage season to...
Lessons We’ve Learned Switching from CAD to a Physical Model By Anuhya, Sol, Krish, and Fernando
Task: Overview the issues with PPE V3 and the changes that need to be made.
This past weekend, we had our regional competition! We were incredibly fortunate to have gotten Inspire 3 and were the 5th advancements to the FTC Texas State Championship in a couple weeks! However, we went into Regionals with a robot we had barely finished...
U^2 Tournament Post-Mortem By Aarav, Krish, Jai, Sol, Tanvi, Alex, Vance, Georgia, and Anuhya
Task: Analyze our performance at the U^2 Tournament
After we advanced to Regionals by winning Inspire 2, we sat down as a team and discussed our performance as a team. Although we advanced, we are not as far as we want, with PPE V3 not built. If we want to advance to State, we need to show up to Regionals with a fully-built V3 that hopefully...
U^2 Tournament Play-By-Play By Aarav, Anuhya, Krish, Jai, Sol, Tanvi, Alex, Vance, and Georgia
Task: Review our performance at the U^2 Tournament
Today, Iron Reign competed in our U^2 League Tournament. We won Think 1 and Inspire 2, advancing us directly to the North Texas Regionals competition on February 24th. Although we could not get V3 of Purple Pixel Eater(our robot) built in time for this competition, we performed well on the field and...
League Meet 3 Post-Mortem By Aarav, Krish, Jai, Sol, Tanvi, Alex, Vance, Georgia, and Anuhya
Task: Analyze our performance at our 3rd League Meet
After our performance at Meet 3, Iron Reign sat down as a team and discussed what happened. Here’s an overview of our takeaways and next steps as a team, divided into our strengths, weaknesses, opportunities, and potential threats.
Strengths:
Pretty consistent robot performance as we went 5-1 and were able to score points...
League Meet 2 Post-Mortem By Aarav, Krish, Jai, Sol, Tanvi, Alex, Vance, Georgia, and Anuhya
Task: Analyze our performance at our 2nd League Meet
After our performance at Meet 2, Iron Reign sat down as a team and discussed what happened. Here’s an overview of our takeaways and next steps as a team, divided into our strengths, weaknesses, potential threats, and opportunities/next steps.
Strengths:
Our autonomous scored the purple pixel consistently when set up correctly. This significantly...
Task: Explain how we arrived at our current drone launcher design
The first iteration of the drone launcher is a simple servo-powered elastic launcher that is controlled like a switch. A linear slide has a servo mounted to the back end and a V-shaped nylon airplane holder is attached to surgical tubing which is attached to a zip tie held by the servo. The system is...
League Meet 1 Post-Mortem By Aarav, Krish, Jai, Sol, Tanvi, Alex, Vance, Georgia, and Anuhya
Task: Analyze our performance at our 1st League Meet
After Meet 1, Iron Reign met to discuss their performance as a team and make plans for the next month in preparation for Meet 2. Here are our takeaways and analysis, divided into strengths, weaknesses, threats, and opportunities.
Strengths:
Our drive team communicated quite well, and we could score pixels very well and...
10/7/23 Meeting Log By Aarav, Anuhya, Tanvi, Sol, Vance, and Jai
Assemble and Test our Pixel Intake System
Today, Iron Reign focused on turning our ideas and designs on CAD into real-life prototypes in preparation for our first scrimmage on October 28th. We began assembling our beater-bar intake system that relies on a custom ninja-flex belt with protrusions that bring in pixels from the ground and from the stack. The ninjaflex belts on the prototype are controlled by a motor...
9/23/23 Meeting Log By Aarav, Anuhya, Jai, Krish, Tanvi, Vance, and Alex
Task: Prepare R2V2 for Filming and begin Designing Subsystems
Today, Iron Reign had an extended meeting to focus on preparing R2V2 for video production and to start designing and testing robot ideas. We plan to produce a complete walkthrough of R2V2, with footage of the individual subsystems and the entire RV driving around autonomously. We were hoping to begin filming today, but we needed to repair both the Steering...
CenterStage Introductory Meeting & 9/16 Meeting Log By Aarav, Anuhya, Krish, Tanvi, Sol, Alex, Vance, and Georgia
Task: Welcome Recruits to the Workshop and begin Robot Ideation
Today, Iron Reign hosted our introductory meeting for all new recruits at our workshop. We also began planning and brainstorming for our competition robot and potential subsystem ideas.
We had approximately 20 recruits in attendance, and we initially showed them the Center Stage reveal video and...
Center Stage Game Reveal and Ri2D Day 1 By Aarav, Anuhya, Georgia, Sol, Tanvi, and Alex
Task: Assess the Center Stage Game and begin Ri2D
Today, Iron Reign attended the season reveal for the new FTC season and began working on this year’s Robot in 2 Days, a tradition where we prototype a preliminary robot the weekend after the reveal to experiment with ideas and concepts. Unfortunately, because of the complexity of this year’s field,...
An Overview of the R2V2 Braking System By Aarav, Tanvi, Krish, Sol, and Gabriel
Task: Design a subsystem to control the braking of R2V2
An essential part of effectively remote controlling R2V2 is the developing a method for controlling the brake autonomously. We decided, for safety reasons, to not involve the accelerator at all, so the movement of RV2V would be reliant on the application of pressure on the brake.
Flyset - R2V2 and Dashboard By Anuhya, Jai, Krish, Alex, and Sol
Task: Give presentations at Flyset about progress made this summer
This weekend, we participated in the FlySet workshop, graciously hosted by team 8565, TechnicBots. We gave two presentations: one on our summer project, R2V2, and one on changes we made to FTC Dashboard.
FTC World Championship 2023 By Anuhya, Jai, Alex, Trey, Gabriel, Vance, Leo, Tanvi, Georgia, Krish, Arun, Aarav, and Sol
Our Experience This Year at Worlds
Over this past week, we had our final preparations for the FTC Worlds Championship in Houston, Texas, which was our final destination after everything we’d done this season. This Championship was an incredible opportunity for us to interact with teams from around the world, and establish relationships with teams we never would...
Scrimmage Before Worlds By Anuhya, Jai, Alex, Trey, Gabriel, Vance, and Leo
Attending a Final Scrimmage Before Worlds
Today, we attended a scrimmage that team 8565, Technic Bots, graciously invited us to. The point of this scrimmage was to get some time seeing the changes which the other Worlds-advancing NTX teams had implemented, and to get some ideas of strategies and alliances. This was the first time we were able to get proper driver practice with the newly designed Transfer Plate...
Consequences of Removing the Shoulder Support Spring By Anuhya, Trey, Leo, Gabriel, and Vance
We learned the consequences of making small changes to build without fully knowing the outcome
A small change can make a huge difference: we have learned that we really should have put the shoulder spring back in place after we rebuilt Taubot. The Crane arm fails to maintain its shoulder angle, and this is an issue which has only started since we built Tau2. We're...
Today, we did drive practice, and worked out some of the smaller issues with transfer.
While doing robot testing, the servo on the underarm shoulder joint broke. We took apart the joint in order to fix the servo, but the servo's gearbox was not accessible, rendering us unable to diagnose the problem, so we had to replace the old servo with a...
Meeting Log 4/1 By Sol, Georgia, Trey, Anuhya, Gabriel, Leo, Krish, Tanvi, Jai, Vance, Alex, and Aarav
Task: Gripper Redesign and Build Fixes
Trey redesigned the gripper stopper on the underarm to limit the degrees of movement so that the underarm gripper will not get stuck. The original design of the gripper stopper did not fully stop the gripper because it did not limit the gripper's movement as much as we wanted it to.
Texas State and UIL Championship Post-Mortem By Aarav, Anuhya, Georgia, Gabriel, Trey, Leo, Vance, Alex, Krish, Jai, and Tanvi
Discuss the events of Regionals, analyze our performance, and prepare future plans
This weekend, Iron Reign participated in the FTC UIL Championship, which was mainly robot game, and the FTC Texas State tournament, where we advanced to FTC Worlds with the Think award, an award granted for the engineering portfolio and documentation. We learned a lot from our gameplay and...
UIL and State Play-by-Play By Aarav, Anuhya, Jai, Alex, Tanvi, Georgia, Gabriel, Trey, Vance, Leo, Arun, and Krish
Review the events of the UIL and FTC State Championships
This past week we participated in the FTC state championship and UIL state competition in Belton, Texas. Overall, we were successful, winning the Think Award at State and thus advancing to Worlds despite less-than-ideal robot performance. First, we will discuss judging and then transition into our game-by-game...
NTX Regionals Post-Mortem By Aarav, Anuhya, Georgia, Gabriel, Trey, Vance, Alex, Krish, and Jai
Discuss the events of Regionals, analyze our performance, and prepare future plans
This past Saturday, team 6832 Iron Reign participated in the NTX Regionals Championship at Marcus High School. Overall, despite some robot performance issues, we won the Motivate award, meaning we advanced to both the UIL State Championship and FTC State Championship. Today, 2 days after the competition, we had our Regionals Post-Mortem, and...
NTX Regionals Play-by-Play By Aarav, Anuhya, Jai, Alex, Sol, Georgia, Gabriel, Trey, Vance, Leo, Arun, and Krish
Review the events of the NTX Regional
Today, Iron Reign participated at the NTX Regional Championship in Flower Mound. Even with major robot performance issues, we were still able to advance to both the UIL State Championship and the FTC State Championship by winning the Motivate award after a strong presentation and portfolio showing. We ended up with...
Meeting Log 2/18 By Alex, Anuhya, Sol, Gabriel, Aarav, Jai, Leo, David D, Georgia, and Krish
Task: Regional Prep, Portfolio Development, Underarm Wiring and new Shoulder and Turret Assembly
To start we began to bring the wiring for the UnderArm through our wiring sleeve. The current UnderArm wiring situation was less than ideal and it needed to be reworked. About half of our UnderArm’s wires were in a wire sleeve and today we added...
Meeting Log 2/17 By Aarav, Anuhya, Jai, Alex, Tanvi, Georgia, Gabriel, and Krish
Work on build, code, and presentation in preparation for Regionals next week.
With the Regional competition coming up quite soon, we needed to get to work finishing up the build for TauBotV2, optimizing the code with new inverse kinematics for the double-jointed UnderArm, finishing up some subsystem blog posts, and practicing and preparing our presentation.
Presentation:
With a heavily below-par performance than the Tournament...
Meeting Log 2/11 By Jai, Anuhya, Arun, Sol, David D, Georgia, Vance, Gabriel, Aarav, Alex, Tanvi, Leo, and Krish
Task: Continue to assemble TauBot2, work on portfolio, and prepare for Regionals
First off, we began assembling and wiring the UnderArm system. In the process of putting the UnderArm together, we ran into a couple of hurdles. The alignment on our parts was incredibly difficult to get right, and in the process of aligning them,...
Meeting Log 2/10 By Tanvi, Sol, Gabriel, Trey, and Alex
Task: Attend to TauBot2 and transfer knowledge to the new recruits
Today was another day of onboarding recruits. For the next few weeks, along with regional preparation, we will be focused on the transfer of knowledge from seniors to recruits. Today the recruits shadowed the senior Iron Reign members, Trey and Gabriel.
Gabriel was working on TauBot 2. Trey was working on...
Overview of the past 3 weeks By Anuhya, Aarav, Leo, Vance, Trey, Gabriel, and Georgia
Task: Recount the developments made to the robot in the past 3 weeks
The past three weeks have been incredibly eventful, as we try to beat the clock and finish TaBbot: V2. We had a lot of work to do in build and code, since we were putting together an entirely new robot, coding it, and getting it competition-ready...
Task: Preparing the Robot for the Upcoming League Meet
General Fixes:
The LED battery holder from the previous meeting snapped, requiring us to rebend and make a new gate for the LED Battery holder from scratch, which took a bit of time. In addition to this, all the set screws on the robot for the shaft collars and the pulley systems, as well as using threadlocker on the right motor mount in...
October 29th Screamage Overview By Georgia, Aarav, Anuhya, Trey, Gabriel, and Leo
Screamage at Marcus High School Overview
Today, Iron Reign attended the Screamage at Marcus High School to play a couple of practice matches. This event allowed us the opportunity to better understand the game flow and further develop a strategy, finally get some drive practice, and point out any flaws in the robot and its design to help improve the next iteration of TauBot.
Think Robot Ideation - TallBot By Aarav, Gabriel, Trey, Vance, and Leo
Task: Design and Think about possible robot ideas after Ri2D
After Robot in 2 Days, we decided to brainstorm and create more robots to test out ideas. One of those preliminary robot ideas was TallBot. This design involved using linear slides to increase the robot's height in order to allow it to drive over...
Our first gripper design was for robot in 2 days and with the time crunch came some downsides: little power and poor reach. Our second design intended to fix these downsides.
V2
Our second gripper design was made just before a scrimmage. While it fixed all V1's downsides it was bulky and heavy.
Solving Tipping Issues in The Reach By Aarav, Shawn, Mahesh, and Bhanaviya
Task-Identify and solve the problems that led to The Reach tipping over mid-match.
Our robot, The Reach, utilizes a hybrid-differential swerve drive along with an extending design in order to effectively cross the barriers and score freight. Although this design is unique and avoids the congested areas of the playing field, it comes with trade-offs and flaws.
Hybrid Swerve Drive Progression By Georgia, Shawn, Trey, and Bhanaviya
Task: Fix issues found by Drive Practice in the robot
Iron Reign has seen several dIfferent iterations of our swerve module this past season. In this post we’ve identified the different versions of our modules so we can isolate the failures and successes of each modification from sketch, to a CAD model to the constructed, manufactured iteration.
To accommodate for our expanding chassis design this year, we’ve had to...
Deriving Maximum Chassis Length On Turns By Mahesh and Cooper
Task: Derive The Maximum Chassis Length On Turns
Having a chassis able to elongate and contract during play poses its advantages and drawbacks. If properly used, the chassis can serve to strategically defend portions of the field. However, if not shortened during turns, the extended length of the robot can lead the swerve wheel to lose traction and start skidding on fast turns. Therefore, it is crucial to...
Deriving Inverse Kinematics For The Drivetrain By Mahesh, Cooper, and Ben
Task: Derive Inverse Kinematics For The Drivetrain
Due to having an unconventential drivetrain consisting of two differental wheels and a third swerve wheel, it is crucial that we derive the inverse wheel kinematics early on. These inverse kinematics would convert a desired linear and angular velocity of the robot to individual wheel velocities and an angle for the back swerve wheel. Not only would these inverse kinematics...
Task: Build a robot that can be adapted to any challenge
The new challenge is upon us and with a new challenge comes new robot designs. This year we have found that we are going to need to focus on the chassis of our robot more than ever. This is because the barrier to the warehouse is an important obstacle that we want to be able to climb or get around in order to...
Task: Describe the construction and development of the Ringevator intake
This year we have done a lot of work on intakes and launchers. The purpose of this post is to go over the function and overall design and build of the Ringevator intake. It doesn’t go too far in-depth so if you are looking for something more specific I would recommend that you look at specific posts discussing different parts...
Task: Create a flow chart to analyze all our intake designs so far in this season.
Iron Reign has seen several iterations of our intake over this past build season. With our first qualifier being 2 days away, its finally time to come full circle and identify the different iterations of our intakes coming together. To do this, our team used a flow chart. A morph chart...
Task: Add Margins Of Error To The Desmos Calculator
In order to visually represent the significance of placing the constraints we did, we modified our desmos trajectory calculator to include a margin of error box. This box would help to highlight the importance of keeping the summit of our trajectory aligned with the goal, and how deviations from the summit would result in drastically increasing margins...
Meeting Log By Ben, Bhanaviya, Cooper, Jose, and Trey
Task: Prepare the portfolio and intake before the qualifier
The three of us worked on the engineering portfolio, discussing what we needed to get done in these 3 weeks between now and the qualifier. It was agreed that Ben, Bhanaviya, and Jose would be largely responsible for the portfolio and having other team members add information when necessary. We also began drafting an email to a physics professor who may help...
In the previous trajectory calculations post, "Derive And Translate Trajectory Calculations Into Code", we did not take into account how the length of the launcher would effect our calculations. In reality, the height the disk would have to travel would be shortened by the launcher, since when titled at an angle the vertical distance would be shortened by \(lsin(\theta)\), where \(l\) represents the length of the launcher....
Task: Create a system to test our materials to better understand their grip potential
Here at Iron Reign, we're used to using off-the-shelf materials for our robot. For this season, these include pillowcases (front and back) and an Einstein wig, since we are looking for materials with lesser grip. However, we need to do a thorough investigation of these materials before we can determine their efficacy on the robot.
This season, we experimented with 5 gripper models - both for our robot in three days project and for our competition bot. While we do not plan on using all 5 of these models, they allowed us to effectively implement the engineering process within our build season. Experimenting with each intake helped us to identify the potential of each design as well as...
Task: Present our flywheel launcher to the Dallas Personal Robotics Group
2 weeks ago, Iron Reign presented our Ringslinger 9000 - our launcher, for brevity - to the Dallas Personal Robotics Group. For reference, Dallas Personal Robotics Group, or DPRG, are a group of robot enthusiasts and engineers who host weekly meetings to discuss personal...
Today we worked on different intake systems to place the rings in the launcher. We finished our first prototype for a belt type intake and lift. The 3d printed belt was able to slide rings along a vertical piece of polycarb to place rings into the launcher. The speed of the motor and belt makes this one of our quickest intake and delivery prototypes. Our other...
Derive And Translate Trajectory Calculations Into Code By Mahesh, Cooper, Shawn, Ben, Bhanaviya, and Jose
Task: Derive And Translate Trajectory Calculations Into Code
To ease the work put on the drivers, we wanted to have the robot automatically shoot into the goal. This would improve cycle times by allowing the drivers, theoretically, to shoot from any location on the field, and avoids the need for the robot to be in a specific location each...
Correcting the Trajectory Calculations Equations By Bhanaviya, Ben, and Mahesh
Task: Correct the trajectory calculations after the DPRG meeting
In the past week, we've been experimenting with a series of equations to derive the angle of launch of our flywheel launcher when we need it to travel a certain distance. 2 days ago, we were able to present the calculations we'd derived so far to Dallas Personal Robotics Group. After feedback from DPRG and a...
DPRG Virtual Meeting By Bhanaviya, Jose, Trey, Paul, and Cooper
Task: Present our flywheel launcher to the Dallas Personal Robotics Group
Every year, Iron Reign presents our robot or standout subsystems to the Dallas Personal Robotics Group (or DPRG) - a group of professional robotics enthusiasts based here in Dallas. The DPRG are an organization in Dallas who have monthly meetings for robotics projects In past seasons, we've given them presentations about our seasonal progress...
Iterate Trajectory Calculations in Preparation for DPRG Meet By Bhanaviya, Mahesh, and Ben
Task: Improve the Trajectory Calculations
As mentioned in our earlier posts, one of the biggest control challenges we face in this year's season is identifying a equation to model how the path of a ring launched from our launcher is affected by its angle of launch. 2 weeks ago, we were able to create a starter equation to model this trajectory....
Code Changes Leading up to the PvC Scrimmage By Cooper
Task: Finalize code changes prior to the PvC scrimmage
Leading up to the scrimmage, many code changes happened, mostly in the area of auton. To start, I tried to run 10 runs of every auton path, to check reliability. Time and time again though, the robot would go off towards joneses, crash into the far wall, or knock over the wobble goal when placing it.
With our first qualifier being around a month away, Iron Reign is currently in the midst of trying to put together a functional (or semi-functional) robot. In a previous post, we detailed the earlier stages of our CAD design. As of now, Iron Reign is still testing our intake systems but before we finalize the system we want to...
With our first qualifier being less than 2 months away, Iron Reign embarked on an ambitious project to create a robot with a circular chassis, an elevator-like intake system, and a fully automated launcher. While this robot is still in construction, we do have a name for it - Proteus. Named after the early-prophetic sea god who was also known...
Modelling an Equation for Forward Speeds of a Ring By Bhanaviya and Ben
Task: Model a projectile motion equation to approximate forward speeds of rings launched from a ring launcher
A key challenge in this year's game is finding the best possible position to launch rings to ensure optimal performance of the ring launchers. Part of this challenge includes approximating a potential forward speed for each ring as it is launched from the launcher itself. There...
We finished manufacturing our new base today, with very little difficulty, but a few flaws. The CAM was already designed so all we had to do was run the operations on the CNC. We drilled out the various sized holes, cut out the inner wheel slots and cable holes. Next was the groove along the edge to fold the side flaps along,...
Wylie East Regionals Post Mortem By Karina, Bhanaviya, Jose, Justin, Ben, Cooper, Mahesh, Shawn, and Trey
Task: Reflect on what went right and wrong at the regionals tournament
Iron Reign is so excited to be advancing to the World Championship. But there's no denying that across the board, we did not perform as well as we were expecting. Following the long day, first we feasted as per tradition. But then at a later time, we all sat down...
Alright kids, back to the usual grind now. As Iron Reign came back from regionals taking a lot away from it, we immediately got back to work because we still had a lot to do before being ready for UIL or Worlds.
Because one of our main weaknesses at regionals was autonomous, our coders came back even more ready than ever...
Match Play at North Texas Regional Championship By Trey, Ben, Aaron, Bhanaviya, Jose, Cooper, Justin, Karina, Paul, Shwan, Mahesh, and Anisha
Task: Compete in Qualification and Finals matches
Today Iron Reign competed at the North Texas Regional Championship with TomBot which was a mess, to say the least. But regardless of this, we were still able to win a few matches and qualify for worlds, which we should be able to do much better in. But regardless of...
Driving at regionals was unfortunately a learning opportunity for our drivers. In our first few matches, for some reason we couldn't get our robot moving; we faced code crashes, cables being pulled, and incorrect calibration during the transition from autonomous to tele-op. These issues combined with our weak autonomous (sorry coders), led to a very unimpressive robot performance for our first few matches.
Wylie Regionals 2020 By Bhanaviya, Cooper, Trey, Justin, Karina, Aaron, Paul, Ben, Shawn, Jose, Mahesh, and Anisha
Task: Compete at the North Texas Regional Tournament
Preparation
Breaking our packing-the-night-before streak, we managed to start the night before. It helped that we had the day before the big day off, and had a decent sized packing list. Over the course of our preparation, we had our side-shields machined, presentation practiced, journals prepared, and autonomous in feverish motion. More...
Task: Create a poster encompassing all of our calculations from this season
From analyzing the friction coefficient of a variety of different materials, to calculating torque for our various robot sub-assemblies, and creating an equation for our tower-stacking abilities in our autonomous, Iron Reign has seen several different series' of calculations this season. Since these calculations are spread throughout our journal, we have compiled all of them in a single poster for us, and visitors to our pit to refer to at the NTX Regional Championship. Below, you can see how the chart is organized:...
Final Weekend Before Regionals - Meeting Log By Anisha, Cooper, Trey, Paul, Aaron, Bhanaviya, Karina, Justin, Shawn, Mahesh, Jose, and Ben
Task: Use feedback from our presentation at DPRG and get ready for regionals
A couple hours ago, we presented our robot at the Dallas Personal Robotics Group (DPRG), and we received insight on not only our robot, but also on our presentation, codebase, and our engineering journals. With this feedback in mind, and considering that we...
Cumulative Drive Test Log 2/3 - 2/6 By Jose, Justin, and Aaron
Task: Summarize the driver practice done throughout the week
Over the course of the following week we have done much driver practice so we can improve our skills as drivers and also make some driver enhancements. On Monday we reached an average of 3.7 stones per match - this includes the endgame procedures but not the stones delivered during the autonomous period. We had a rhythm of...
Post UME Drive Changes By Justin, Aaron, Trey, and ben
Task: Improve Robot Driving
Since the qualifier at UME, we have been focusing on tuning controls to make driving smoother. Our first set of improvements was changed turret controls. The turret driver now could turn slowly with the joystick and quickly with the triggers. This allows the turret driver to quickly move the arm when the base is driving and still be able to stack precisely....
Task: Calculate the friction coefficient of various off-the-shelf materials
Before our last qualifier, we ran a couple material tests to find the friction coefficient of different materials. Now, since we've upgraded to a new gripper - the Snapdragon - a passive-intake gripper - we will need a newer material with much better grip than the ridged silicone oven-mitt we used for our previous 3-finger gripper. Since our new gripper works...
Task: Update the list of parts for TomBot for regionals
Being around 2 weeks away from the North Texas Regional Championship, Iron Reign has made significant new changes to its Bill of Materials. s of now, TomBot has several build issues that will be discussed in our post-mortem posts. Part of rectifying these issues includes ordering/printing more parts and editing the bill accordingly. But the beauty...
UME Prep Qualifier Cumulative Post-Mortem By Jose, Bhanaviya, Anisha, Mahesh, Karina, Cooper, Justin, Paul, and Trey
Task: Analyze what went wrong at the UME Prep Qualifier
It has officially been one week since the UME Prep Qualifier and we are now 4 weeks away from the Regional Championship. This is not great but it does mean one thing - a post-mortem talk! A post-mortem talk allows us to analyze our performance in full detail and take a closer look...
During the STEM Expo, while also helping volunteer, we worked on auto. There were a series of cascading events that were planned and completed. The first of which was to calculate the TPM of the base. There was, however, a problem before we did that. Our robot has a slight drift when trying to drive straight, which could be solved by driving based off of the...
UME Qualifier By Bhanaviya, Karina, Cooper, Jose, Trey, Aaron, Ben, Justin, and Paul
Task: Compete at the UME Preparatory Academy Qualifier
A solid month or so after our first qualifier, Iron Reign walked through the doors to our second qualifier at the UME Preparatory Academy with our three sister teams. Compared to last season, we had gotten significantly more driver and presentation practice, but we still weren't as organized as we could have been and in a...
Match Play at UME prep. Qualifier By Trey, Ben, Aaron, Bhanaviya, Jose, Cooper, Justin, Karina, and Paul
Task: Compete in Qualification and Finals matches
Today Iron Reign competed at our second qualifier at UME Preparatory Academy with TomBot which could have been better in terms of autonomous, driver practice, and build. But regardless of this, we were still able to be in the winning alliance and the following are descriptions of the match play that made that happen. For...
Task: Create a morph chart to analyze all our 3-finger gripper versions so far in this season.
Just like with our gripper designs, we've also gone through a number of changes with our final gripper - the 3 Finger Gripper. This calls for one thing - a morph chart! A morph chart shows us the various subsystems of the 3-finger gripper as it went through its different stages of design....
Today we worked on driving the robot with new presets. Over the weekend, our coders worked on new presets to speed up our cycling time. The first preset the drivers learned was the cardinal directions, which allows the base driver, but potentially both drivers to quickly rotate the turntable 90 degrees. This made switching from intakeing to stacking directions very fast. To further speed up...
Today we worked on driver optimizations, since Justin was here. We changed around the controls for the arm to be more like the drivetrain and the D-pad on controller 1, with the left stick by controlling the elbow, the x controlling the turret, and y on the right stick to control the extension of the arm. This was cited to be more natural to the drivers than the previous setup. Then...
Today we started testing out our new two controller setup. The goal is to have one driver control just the base, and have the other driver control the arm and turret. With the early stage of the 2 driver code, we were able to practice maneuvering around the field and placing blocks. unfortunately the code wasn't completely sorted, so the turret controller lacked many features that...
Task: Analyze torque at the turn-table and how it affects our choice of motor sets
We want to know if we are using the best possible motor set on our turntable. Since our turn-table is programmed to rotate at the fastest possible speed, we are not too concerned with a motor that turns faster but rather one that has a higher level of control and produces a higher output torque. A...
Calculating Torque at the Drive-Train By Bhanaviya
Task: Calculate torque at the drive-train and analyze our choice of motors
During drive-testing, one issue we noticed was that our robot was not as fast as could be, and in a speed-based game, this is not ideal. So, we decided to calculate torque at the drive-train, which currently runs on two Neverest Classic 40 motors. Currently, we are looking to replace these motors with REV HD Hex...
Task: Design an equation to model the torque at the elbow linearly
In order to maximize our robot performance, we need to be able to use motors and gears with the most ideal gear ratios. This means having the right amount of torque to produce the most efficient performance out of our robot arm. As the arm extends, there is quite a bit of torque on the elbow. We want to...
As we progressively make our robot more autonomous when it comes to repeated tasks, it's time to map these driver enhancements. Since we have so many degrees of freedom with TomBot we will experiment with using two controllers, where one is the main controller for operating the robots and the second handles simpler tasks such as setting the tower height and toggling...
Task: Gripper swivel, extendToTowerHeight, and retractFromTowerHeight. Oh My!
Today is the second to last day of 2019, and therefore the same of the decade. Thus, I want to spend it at robotics. Today I worked solely on vision testing and attempt of implementation. However they ended up being fruitless, but let me not get ahead of myself. To start the day, I tried looking at the example vuforia code that was provided. After...
Task: Measure the coefficient of friction of our potential gripper materials
We want to measure various constants of materials on our robot. These materials serve to improve the grip on our gripper. But before we can decide which material will be most effective on our gripper, we need to find the friction coefficient of these materials through a slip test. The slip test is detailed in a separate post in Read More
Extend to Tower Height and Retract from Tower By Cooper
Task: Develop the controller so that it can extend to tower height
Since we have decided to move onto using 2 controllers, we can have more room for optimizations and shortcuts/ articulations. One such articulation is the extendToTowerHeight articulation . It takes a value for the current tower height and when a button is pushed, it extends to just over that height, so a block can be placed. This happened in...
Task: Gripper swivel, extendToTowerHeight, and retractFromTowerHeight. Oh My!
Today was a long day, clocking in 10 hrs continuously. In those ten hours, I was able to make tremendous progress. Overall, we have 4 main areas of work done.
The first one gets it’s own blog post, which is the extendToTowerHeight, which encompasses fixing the 2nd controller, calculating the TPM of the arm, and calculating the TPD for the elbow.
Task: Create a system to test our materials to better understand their grip potential
Here at Iron Reign, we're used to using off-the-shelf materials for our robot. For this season, these include silicon oven-mitts and ice-cube trays, since we find these grip skystones pretty well. However, we need to do a thorough investigation of these materials before we can determine their efficacy on the robot.
Task: Plan out potential robot articulations to improve game strategy
Getting back from the tournament, we were able to immediately start to think about what was the big problems and possible improvements to the articulations of the robot. Overall, we ended up coming up with several ideas, both for fixing things and for efficiency.
1- Turntable Articulations
In the competition, we realized the extreme convenience that having some articulations for the...
So far, we have experimented with 3 capstone models. While we do not intend to use all 3 of these models, they allowed us to effectively implement the engineering process on our robot. Although the capstone isn't physically a part of a robot, its various iterations influence the model of the gripper being used since the ideal gripper must be able to pick up both...
Allen Qualifier Post Mortem By Karina, Bhanaviya, Jose, Ben, and Paul
Task: Plan for upcoming tournaments
So our Allen qualifier was a success! Iron Reign won the Inspire Award, which we are so honored to have been given. We did a detailed SWOT analysis to identify our strengths, weaknesses, opportunities, and threats.
Short-term Post-Mortem Talks By Bhanaviya, Cooper, Paul, Aaron, Ben, Jose, and Trey
Task: Begin analyzing our performance at the Allen qualifier
It’s officially been a week since our first qualifier at Allen. Although we succeeded in qualifying there’s still a lot of work to be done before it we’re ready for the regional championship. Before we could begin any preparation for regionals, we needed to start off by analyzing our performance at Allen. To do this we created a...
Task: Create a list of parts needed for the new robot
To determine all the materials we need for the new robot, we started a Bill of Materials. To do this, we first analyzed TomBot sub-system by sub-system. We determined the parts used for each sub-system and placed it into a spreadsheet. Upon doing this, we needed to get each part's exact measurements so that we could save time...
Allen Qualifier Post Mortem - Code By Jose and Cooper
Task: Analyze our strengths, weaknesses, opportunities, and threats for our code at the Allen Qualifier
Fresh off our first qualifier at the Allen STEAM Center, we decided to begin a SWOT (Strengths, Weaknesses, Opportunities, Threats) analysis for code. While we will have other posts specifying what issues we needed to debug after the qualifier, and what articulations we need to implement within our code, this article mainly focuses on...
Prior to updating the model, the model purely consisted of the chassis and the primitive turntable. Since then, both the turntable and chassis have been updated to reflect the current state of the robot, along with the addition of the elbow and slide. The elbow component consists of GoBILDA shafts, gears, and connectors, along with the logarithmic spiral. The elbow can be seen below.
Task: Design a swivel and add ninjaflex parts to improve the finger gripper
From what we learned at the Allen Qualifier the gripper needs some major improvements before it will work at its max performance. The first change that needs to be made is replacing the current grip material with some more flexible material, such as ninja flex which we have used before as a gripping material. The print...
Task: Design a swivel mount to improve the degrees of freedom on the gripper
After the recent competition, we realized that a good way to increase precision would be to add, of course, another axis of rotation. This was the most efficient way to be more precise and pick up a stone from all angles. With a swivel mount, the gripper would be able to rotate on the y axis, via a...
After the qualifier, along with articulation plans, we had a long list of bugs in the code that needed to be sorted out. Most of them were a direct effect of not being able to test the code until the night before the qualifier. In hindsight, there were some issues which needed to be debugged in the turntable and turret.
Drive Issues at Allen Qualifier By Justin, Karina, Jose, and Aaron
Task: Identify points of improvement after driving at Allen
While using our untested code and inexperienced drivers at the Allen STEAM Center this weekend, we encountered many issues while driving. Our biggest issue was with the turntable, which bugged us the whole day. First it was really slow, then it turned but after a 3 second delay, then we finally made it driveable but it turns to...
Task: Begin analyzing long-term build improvements
Moving on from the Allen qualifier, there are a couple issues we need to fix. Aside from the usual wear and tear a robot experiences in it’s relatively short life-span, there are some specific opportunities we have for optimal robot performance which we hope to act upon.
First, our grippers don’t have enough degrees of freedom to rotate fully. Being able to rotate gives...
Allen Qualifier By Bhanaviya, Karina, Cooper, Jose, Trey, Aaron, Ben, and Justin
Task: Compete at the N. TX Allen STEAM Center Qualifier
Right off of a subpar performance at the Woodrow Wilson Scrimmage, Iron Reign walked on shaky ground to the qualifier at the Allen STEAM Center. In the 2 weeks leading up to the tournament, Iron Reign worked hard, with countless changes to our blog and robot. Despite this, we had virtually no driver practice for...
Match Play at Allen Qualifier By Jose, Ben, Aaron, Bhanaviya, Trey, Cooper, Justin, and Karina
Task: Compete in Qualification Matches and maybe some Playoffs
Today was our first qualifier at the Allen STEAM Center and we were able to compete with our official competition robot, TomBot, at the event. With its build being done the day of and its code also minimal, we didn't have high hopes coming into this competition in terms of robot game. Nevertheless, the following...
Night Before Competition Build By Aaron, Cooper, and Trey
Task: Transform a mass of metal into a functional something in the span of one night in time for the qualifier tomorrow.
Twas the night before competition and the robot was most definitely not competition ready. This is what usually happens, but once again we found ourselves scrambling around to get everything together before the end of the night. We ended up mounting the gripper, setting up the belts,...
Task: Create a morph chart to analyze all our designs so far in this season.
Iron Reign has seen several iterations of several subsystems over this past build season. With our first qualifier being 2 days away, its finally time to come full circle and identify the different iterations of different subsystems coming together. To do this, our team used a morph chart. A morph chart shows the various...
Task: Design a system that could linearly reduce torque.
Since last season, we have conducted a significant amount of experimentation on our elbow and slide mechanism. We are using a similar design because we have prior knowledge on how to construct and maintain the subsystem; however, our slide this year is larger due to our desire to stack the stones higher. Although our elbow could lift the entire slide, we want to reduce the...
As our 8th gripper design we modeled a stub gripper, inspired by 7129’s Ri30H. Several of our previous grippers were designed with the intention of being mounted our scrimmage/Robot in 2 Days bot Frankendroid. This is our first gripper design modeled with the full intent of being mounted on our circular chassis bot, TomBot. In essence, this gripper has some bars to align the gripper...
With our first qualifier being less than a month away, Iron Reign embarked on an ambitious project to create a robot with a circular chassis named TomBot (which was, for reference, named after our coach's cat, Tom). Before we began the build of the robot, we planned out the chassis design in an earlier post on CAD. Now, with...
First Season Scrimmage at Hedrick MS By Trey, Bhanaviya, Ben, Jose, Justin, Aaron, Karina, and Cooper
Task: Compete and observe important things needed to continue the build of circle robot and for future competitions.
This Saturday Iron Reign attended the scrimmage at Hedrick Middle School. This scrimmage was for many rookies, the first exposure to a competition environment and the basic structures of team communication. Both the rookies and the returning team members had an...
Driving at the Hedrick Scrimmage By Karina and Jose
Task: Figure out what went wrong at the scrimmage
We didn't do too well in teleop driving at the Hedrick Scrimmage, with our max stone deposit being 2 stones. There are several things to blame.
In usual Iron Reign fashion, we didn't start practicing driving until a day or two before. Since we were not familiar with the controls, we could no perform a maximum...
To kick off our autonomous programming, Iron Reign created our first version autonomous path plan. We begin, like all robots, in the the loading stone, its back to the field wall and with our intake arm upwards. We approach the line-up of stones and deploy the arm to its intake state over the last stone. At the same time,...
A challenge we face this year is running into other robots. Last year, it was possible to easily get around other robots; however, this year it will be difficult to get around other robots, as there will be a lot more cross traffic in the building zone.
Our solution to this is designing a circular chassis. This will...
After the end of the two day robot build, we had come up with two main gripper designs. One was consistent, however heavy and large, (Wheel Gripper) and one was lighter but wasn’t quite as versatile or controllable (Aaron's Super Cool gripper That Worked 100% of the Time). P.A.U.L (Pivoting Accelerated User-friendly Locker) is the best of both worlds....
Robot in 2 Days Grippers Comparison By Jose and Bhanaviya
Task: Analyze all our grippers from the Robot in 2 Days challenge
During the making of our Ri2D we prototyped and designed several gripper designs to collect stones. These designs varied in the method of manipulating the stone, how many servos they required and how compact they are. All of these gripper designs have their own post describing them in...
While there are many different solutions and gripper designs, one of the most common is the parallel gripper. The purpose of a parallel gripper is to grip objects, in our case stones, parallel to the object instead of at an angle. Since this was a rational idea to start off with, this was one of the gripper designs we experimented with in the duration of our Robot in...
Task: Build a gripper system for the 2019-2020 Skystone Challenge
The rack-and-pinion gripper system is one of the 4 gripper systems we built this weekend for our Robot in 2 Days project. Since we’ve never used a rack-and-pinion system before, we realized that it would be a creative idea to start off the new season. Going for simplicity, we made a box such that we...
Task: Design an intake for the stones based on wheels
Initial Design: Rolling Intake
The first idea we came up with for gripper designs during our Robot in 2 Days (Ri2D) challenge was a rolling intake with the wheels coming from the top and spinning to intake the stone. Since the wheels needed to spin they were placed on shafts which required two extrusions since the pillow bracket for them...
Aaron’s Super Cool Gripper That Works 100% Of The Time By Aaron
Task: Prototyping a rolling gripper
During the 2 day robot challenge, one of the gripper designs that we built on the first day was Aaron’s Super Cool Gripper That Works 100% Of The Time. While it did work most of the time, it was a bit too bulky to be implemented effectively in the two day period we had.
Task: Model a points system for the Skystone Challenge
A couple hours ago, Iron Reign attended the reveal for the 2019-2020 FTC game - SKYSTONE. Since we intend to build a robot within the frame of this weekend, a points system will allow us to identify what specific parts of the challenge we'd need to solve first. It will also serve as a calculating tool for when we begin...
This year, I started the role of project manager, and there have certainly been plenty of growing pains. Iron Reign had previously learned to embrace chaos, frequently pulling all nighters and fumbling to finish each part of the robot in a timely manner. In this post, I will discuss all of the different aspects to being a project manager on Iron Reign so that we can continue to improve on...
Task: Test the REV Control Hub ahead of the REV trial
Iron Reign was recently selected to attend a REV Control Hub trial along with select other teams in the region. We wanted to do this so that we could get a good look at the control system that FTC would likely be switching to in the near future, as well as get another chance to test our robot...
Earlier in the year, we posted an early version of the Gantt chart as seen in (T-17, Project Management). Since then, the chart has seen many changes, which can be seen below:
See finished Gantt chart at front of notebook in pocket.
Since the last update, we have added a few groups, notably research and development. The Gantt chart, along with other higher-level planning is completely foreign...
Ninja Flex Intake V2 By Jose, BenB, Karina, Evan, Abhi, Ethan, Charlotte, and Aaron
Task: Design, implement, and test a newer version of the ninja flex intake
The new ninja flex intake is good, but it has room for improvement. One issue is that it is too big and minerals have some problems entering the intake tray, Another issue is that the spacing of intake gears is too much and cuases minerals to be intaked slower....
Shortly after creating the new Tetrix gear system, we got a response from one of the CNC shops we'd reached out to, offering to machine the 15 and 125-tooth REV gears from the STEP files. So, we took the Superman system off of our old robot, BigWheel, and sent some of the broken 15-tooth gears from UIL.
Task: Custom design an intake to improve intake times
In testing, we found that the intake didn't perform adequately - the balls would slide back out in the inverse articulations. So, we designed attachments for the corn-cob intake out of ninjaflex, figuring that small tabs would hold the minerals in better. It failed - they were too compliant - but we found it was much easier to intake minerals than before due to...
Task: Redesign the Superman arm to be more robust for Worlds
In posts E-116, we found that we were putting pressure on the individual teeth of the Superman gears on the order of mPa. We designed gearkeepers to ensure that the gears would interlock and reduce pressure, and these worked for awhile. However, under tournament pressures at UIL, the teeth on the smaller gears broke entirely - between the teeth...
UIL 2019 By Ethan, Charlotte, Evan, Janavi, Beno, Benb, Bhanaviya, Abhi, Arjun, Jose, Aaron, Paul, Cooper, and Justin
Task: Compete at the Texas State Championship
Today, we competed at the Texas State Championship, UIL Robotics, Division 5A-6A. We finished our robot earlier this week, so this served as a testing ground for our new robot and code.
Judging and Awards
There is no presentation at UIL - the judges appear at the pit ad-hoc to ask questions. And,...
Task: Design and test intake flappers to speed up mineral intake
Due to our new intake articulation involving the superman wheel the ice cube tray intake is slightly too elevated to intake minerals. To fix this we designed small flappers out of ninja flex(the Iron Reign way) to help the intake reach further. Tests prove this intake to be quicker than the ice cube tray alone and it should...
Since our project manager is leaving for college next year, there has been an effort to teach the younger students on our team to take on this role and its many responsibilities. These responsibilities include updating the Gantt chart, writing meeting logs, gathering information for meeting logs when you are not able to make it to meetings, leading and helping writing post mortem and roads to, ensuring general organization...
Since the last post, in which we installed the Superman Arm, we've installed the second stage of the linear lift and the belt drive that accompanies it. We began by drilling two holes in the linear slides that were exactly the space between the holes on the carriages for the linear slides using a drilling template we printed on the Tazbot printer. We did this to...
Task: Determine equations to find robot Center of Gravity
Because our robot tends to tip over often, we decided to start working on a dynamic anti-tip algorithm. In order to do so, we needed to be able to find the center of gravity of the robot. We did this by modeling the robot as 5 separate components, finding the center of gravity of each, and then using that to...
At the same time as the elbow joint was being done (which can be found in the article "Constructing Icarus' Elbow”) the Superman lift was being installed in the back half of the robot. The old superman system was difficult to install, but we designed it to be slightly easier. Mounting brackets were already pre-set in the robot so we...
Constructing Icarus' Elbow By Evan, Aaron, and Ethan
Task: Build the elbow for intake
In the last Icarus' blog post, it was just getting the basic flat, support frame of the robot. The next step in the construction of Icarus' is the elbow joint that holds the intake. This time around, we simplified everything significantly as compared to BigWheel, reducing the excessive aluminum parts to two 3D printed parts. We attached these to the REV rail that...
Task: Update the meetinglog template to more accurately reflect efforts
An essential part of the project management role is the meeting log, where the project manager records all progress made in each subteam during each session. It requires diverse knowledge of every part of the team, and is a very important part of our engineering journal, tracking the lower level progression of the team.
The meeting logs were previously constructed in long form paragraphs,...
Task: Design an elbow for bigwheel that we can 3d print
To speed up the build process of the new robot, we made a 3D printable part of the elbow joint. The design simplifies the complex assembly of the elbow mounting point and makes it a single printable part. The old elbow contains many different parts that would need to be spaced precisely in order for the gears to mesh properly, while...
A big part of our redesign is improving our intake system. To see where some of the errors may lie, we took detailed videos of our robot intaking silver and gold minerals from a side view, one mineral at a time. We measured the time between when the intake first made contact with the mineral, and when the mineral was directly underneath the rotating icecube tray, and therefore in our...
Task: Create a list of parts needed for the new robot
To determine all the materials we need for the new robot, Karina and I started a Bill of Materials. To do this, we first analyzed Big Wheel sub-system by sub-system. We determined the parts used for each sub-system and placed it into a spreadsheet. Upon doing this, we needed to get each part's exact measurements so that we could...
Task: Perform the final steps to complete Icarus' base
Since we finished the polycarb base, our robot went through some major changes. We last left our robot in the post-bend stage, just a piece of polycarbonate. The first thing we did was to square the whole robot with side brackets. These cleanly ripped aluminum C channel side brackets now serve as the highly accurate frame of our robot, which...
New Robot Base - Icarus By Evan, Justin, Aaron, and Ethan
Task: Build the base for the new robot
Since BigWheel was never intended to be a competition robot, we decided to build an entire new robot based off of it. This means that the base plate of the robot is going to have to be the most accurate part of the robot since everything after that has to be built upon it. To do this,...
Today we managed to get our robot to balance for 30 seconds after spending about an hour tuning the PID gains. We made significant progress, but there is a flaw in our algorithm that needs to be addressed. At the moment, we have a fixed pitch that we want the robot to balance at but due to the weight distribution of the robot, forcing it to balance at some fixed setpoint will not work well and...
VEX 393 Motor Testing By Jose, Cooper, Aaron, and Janavi
Task: Test VEX Motor 393 as a faster servo for intake
We need to speed up our intake to spend less time in the crater collecting minerals. We can accomplish this using VEX 393 Motors with high speed gears integrated, these motors are great since they count as servos, not motors. In terms of progress, this is what we did:
Beyond the Gantt chart and meeting logs mentioned in (T-17, Project Management), another one of the biggest additions to the team with the project management role are planning sessions. Planning sessions are a seemingly simple concept, but the team has struggled with actually implementing them. The main purpose of these sessions are to set off each member with a game plan, one that will keep them productive, engaged, and helpful to the...
At this point in the season, we have time to clean up our code before development for code. This is important to do now so that the code remains understandable as we make many changes for worlds.
There aren't any new features that were added during these commits. In total, there were 12 files changed, 149 additions, and 253 deletions.
North Texas Regional Postmortem By Ethan, Charlotte, Abhi, Janavi, Evan, Ben, Jose, Justin, Karina, Bhanaviya, and Arjun
Task: Analyze what went wrong at North Texas Regionals
We performed really well at Regionals; we actually won our first game of the season and ended 4-2 and were selected for an alliance. But, we still didn't do everything right. We were on the verge of not being chosen for Inspire, and we can't risk the same at Worlds.
Wylie Regionals 2019 By Ethan, Charlotte, Evan, Kenna, Karina, Abhi, Arjun, Bhanaviya, Ben, Justin, Jose, and Janavi
Task: Compete at the North Texas Regional Tournament
Preparation
Unlike other tournaments, we started packing before morning. We packed as if we were going out of state, bringing a bandsaw, all-new charging box, every replacement part imaginable, and a printer which would ultimately come in handy later. We relied on a packing list created by Janavi, detailed below.
Updating the Bigwheel model to the robot’s current configuration was a challenge. The new linear slides are not standard parts, so we had to model them from scratch. There was some cleaning up that was needed on the drivetrain of the model. This was mainly attaching floating motors to motor mounts and axles to bearings. These were mainly cosmetic changes, but they help define the purpose of...
Task: Tweaking ftc_app to allow us to drive robots without a Driver Station phone
As you already know, Iron Reign has a mechanized cart called Cartbot that we bring to competitions. We used the FTC control system to build it, so we could gain experience. However, this has one issue: we can only use one pair of Robot Controller and Driver Station phones at a competition, because of WiFi interference problems.
In our motion, our robot shifts multiple major subsystems (the elbow and Superman) that make it difficult to keep the robot from tipping. Therefore, through driver practice, we determined the 5 major deployment modes that would make it easier for the driver to transition from mode to mode. Each articulation is necessary to maintain the robot's center of gravity as its mode of...
Task: Analyze past successes and failures in our latching system
Version 1
The first version of the latch worked decently. We started out with the idea of a one-way, passive latch. This idea involved mounting smaller bearings and gears between them, with a spring-like nylon piece that moved only when downward pressure was placed upon the gears. This design was only fully realized before the Wylie Qualifying tournament, and only...
Task: Rebuild the elbow after total gear annihilation
In a previous post, we detailed the extent to which we had stripped our gears - they were missing teeth in several places and the black anodization layer had completely stripped away. So, we had to replace them. The first order of action was to design gearkeepers for them. We've designed gearkeepers before, for the Superman arm, but these have different...
Throughout this season our team has completed various calculations from the torque of our robotics arm, to the speed of the wheels. Since these calculations are spread throughout our journal, we decided to amalgamate them into a single poster that is easy for us to refer to. In this poster we have calculations for
Task: Analyze the issues with the elbow arm of our robot
The elbow arm of the robot is what allows us to rotate the arm of our robot - the linear slides what hold the intake. Recently, while doing some drive testing, we found that the elbow wasn't acting as it should. When we took a closer look at it, we realized that the metal gears had started to destroy...
Task: Design and implement pulley spacers to prevent belt interference
We had an issue where the belts that allowed our arm to slide upward were misaligned, resulting in the belts frequently slipping. We narrowed the slippage down to a single point, at this pulley.
We had to create a new spacer to keep that section of the belt inline with the rest. As usual, we took...
Task: Fix some issues on BigWheel before the build freeze
We made more secure way of activating our hook, so we switched our piece of wire attaching the servo to the hook with a much stronger and less likely to bend strip of polycarb, which greatly improved the reliability of the hook.
As well, we limited the back and forth motion of our slides at their attaching points. I achieved this by inserting a small...
We are updating our bigwheel model to represent our current robot. We had a model of just the chassis from the chassis study, so we are currently adding all of the changes we made throughout the season.
Woodrow Wilson Scrimmage By Bhanaviya, Charlotte, Janavi, Kenna, Karina, Evan, Abhi, Jose, Ben B, and Arjun
Task: Compete at the Woodrow Wilson Scrimmage with Woodrow teams
This past Saturday, Iron Reign competed in the Woodrow Wilson Scrimmage. To ensure that the wiring did not become tangled when the robot moved around, we added an ABS cable-carrier to the arm of the robot.
Overall, Iron Reign was able to establish a semi-stable deposit scoring...
Meeting Log By Charlotte, Evan, Ethan, Kenna, Karina, Abhi, Arjun, Ben, Jose, Janavi, and Bhanaviya Meeting Log February 09, 2019
Today's Meet Objectives
Today we participated at a scrimmage held at Woodrow Wilson High School. This was a fantastic opportunity to get some driver practice in real, timed games and adjust for issues.
Today's Meet Log
Hook implementation
Since we have made a few changes to the robot, such as adding a servo to our...
Our latching system is too complicated to use quickly; it requires too much reliance on driver control and becomes jammed. So, we forged an iron hook to replace it. We started by taking an 8mm iron rod and placing it into the forge that we have, heating it up and bending it into shape over the course of an hour. We...
Task: Test robot performance at the STEM Expo to inspire younger kids and practice
An FLL team gathered around Iron Reign’s robot
We had the privilege of being a vendor and representing SEM at DISD's STEM Expo this weekend. Thousands of people cycled throughout our area during the day, so we had the opportunity to show off our robot to many people. Some of these people...
The picture above is a representation of our work today. After making sure all the manual drive controls were working, Karina found the positions she preferred for intake, deposit, and latch. Taking these encoder values from telemetry, we created new methods for the robot to run to those positions. As a result, the robot was very functional. We could latch onto the lander in 10 seconds (a much faster endgame than...
Meeting Log February 02, 2019 By Charlotte, Kenna, Ethan, Bhanaviya, Jose, Ben, Evan, and Janavi
Meeting Log February 02, 2019
Bhanaviya working on the blog
Today's Meet Objectives
The DISD STEM Expo took place today. While incredibly rewarding, the experience was tiring, so only a few members made it back for the meeting that took place afterwards. This log will include our objectives and accomplishments from the meetings we held throughout the week after school which include...
Fixing Mineral Dropper Components By Jose and Evan
Task: Fix any issues with the mineral dropper
At the STEM expo we saw a clear issue with the mineral dropper: it is very poorly geared and doesn't deposit minerals well. A quick look at the gear configuration revealed that the gears were attached in a poor manner such that there was a lot of gear skippage. To remedy this, we attached a gear-box to the dropper to keep the gears interlocked.
Task: Assemble the V.3.5 latch and attach to the robot
We assembled the fourth version of the latch today. Some of the improvements on this latch include using bigger bearings and thrust bearings inside. This latch is designed to be stronger and more reliable. After cleaning the parts and trimming some edges, we assembled the pieces. Upon assembly, we discovered an issue: the gears required a different amount of pressure to catch the lock. If left...
Task: Create a mechanical deposit for our selective deposit
To relieve driver stress, we decided to put a mechanical release mechanism that would drop the minerals into the passive sorter to then further deposit them. The lever that activated the release mechanism was made of thick wire attached to a small gearbox that reversed the direction of rotation for the release gate. The lever activated the gearbox when it was pushed into the...
We need to add omniwheels to the intake arm to allow the arm to rest on the ground, while still maintaining the necessary height for collecting the minerals. If the height is too low, the minerals wouldn't be able to move through the intake. If the intake was too high, it wouldn't be able to grip onto the minerals and pull them through. We decided to use omnidirectional wheels as...
Task: Create and install gearkeepers to reduce slippage
We need to install gearkeepers on the Superman arm to prevent gear skippage which damages gears over time. We designed a simple rectangle in PTC Creo and cut holes to fit bearings, 3D-printed them, and attached them.
Now it was time to test for gear skippage. Unfortunately, we had one or two gear skips with every attempt of...
Task: Calculate torque and other values of the Superman arm on our robot
We want to have our robot completely replicable through the journal. So, we found it necessary to include the power calculations of various subsystems on our robot.
Superman Arm
The Superman arm uses two REV Core Hex motors to lift the robot upward, outputting a base 125 RPM and 6.4 Newton-meters of torque. Then, we have 15-tooth gears attached to...
Our first attempt at a latch was made out of flat metal L brackets that would slide into the hook, but they slid off under any stress. We decided to make a latch with a ratchet and sprocket system. The easiest way to accomplish this was to 3d print it. There are two sprockets and the lander hook will slide in between them. This causes...
Wylie East Postmortem By Ethan, Janavi, Charlotte, Karina, Abhi, Justin, Kenna, Arjun, and Bhanaviya
Task: Analyze what went wrong at Wylie
We performed well at Wylie, comparatively speaking. But, there's always room for improvement.
Problems:
The Robot & Code
Latch
So our first major issue was the latch. We had put together the latch the week before the tournament and tested it the night before, finding that the bearings fell out of the...
Meeting Log January 26, 2019 By Charlotte, Kenna, Ethan, Justin, Arjun, Abhi, and Bhanaviya
Meeting Log January 26, 2019
Today's Meet Objectives
We are going to use our experience from last week to guide our improvement until Regionals. Today we are going to discuss what these improvements exactly entail and outline a timeline for when we need to accomplish these improvements in order to allow adequate time to dedicate to autonomous code and drivers' practice.
While at the Wylie quaiifier, we had to make many changes because our robot broke the night before.
First thing that happened was that the belt code was added. Previously, we had relied on gravity and the polycarb locks we had on the slides but we quickly realized that the slides needed to articulate in order to preserve Superman. As a result, we added the belts into our...
Wylie East Qualifier 2019 By Ethan, Charlotte, Janavi, Evan, Abhi, Arjun, Karina, and Justin
Task: Compete at Wylie East
Wylie East was Iron Reign's second qualifier of the year. Having qualified at the first one, we planned to use the tournament as an opportunity to practice the presentation and driver practice, as well as check up on other teams' progress. We didn't have a working robot going in - we had found that our latch was one-time-use...
Task: Design a quick intake for the robot before competition
The night before our final qualifier, we decided that the intake system on the robot was not up to our standards. To fix this issue, we poked some holes in a pool noodle, and put surgical tubing through it. While this was a quick and semi effective fix, it did have some problems, mostly due to the rushed nature of its construction....
Task: Design a new sorting mechanism for gold and silver particles
The differentiation between the different shapes of minerals has been something we’ve been thinking about since day one. At the time we designed a box that allowed us to sort out blocks and balls by size, but weren't able to implement it. Our original selective intake only accepted balls so we only have to go to the one loading area, but our...
Iron Reign has access to an Epilog Mini laser-cutter through our school, so we decided to use it to create side shields to protect our robot during defensive play, display our team numbers, and prevent wire entanglement
We created our original design in Illustrator. The canvas size was 12"x18", ensuring that our design stayed within the size limits. Then, we found the side height...
Task: Install a belt lift on our robot for depositing
The most recent addition to BigWheel has been the addition of a belt drive lift on either side of the linear slides. We chose a belt lift over a string and pulley lift because it is a much more secure, closed system, and doesn’t require stringing. For these reasons, we switched to belt drive. While more complicated to build, it requires...
Meeting Log January 12, 2019 By Charlotte, Kenna, Karina, Evan, Justin, Abhi, Ethan, Arjun, and Janavi
Meeting Log January 12, 2019
Today's Meet Objectives
Today our goals include presentation practice, autonomous testing and fine tuning, and build changes from the newest update of the latch to replacing our REV rails with carbon fiber tubing.
Presentation practice
Today's Meet Log
Presentation practice
With the competition a week away, we are practicing our presentation frequently. Last time we...
The other day, when running through Bigwheel's controls, we came across an error in the code. The motors on the elbow did not have min and max values for its range of motion, causing the gears to grind in non-optimal conditions. Needless to say, Iron Reign has gone through a few gears already. Adding stops in the code was simple enough:
One of our priorities this season was our autonomous, as a perfect autonomous could score us a considerable amount of points. A large portion of these points come from sampling, so that was one of our main focuses within autonomous. Throughout the season, we developed a few different approaches to sampling.
Early on in the season, we began experimenting with using a Convolutional Neural Network to detect...
Early in the season, we made a hook, Although it was durable, it required a higher amount of precision than we would have liked to have, especially in the rushed last seconds of the endgame. As a result, we designed a latch that is completely 3D printed and placed it on the robot.
This is the general model of it fit together (excluding left panel)....
Meeting Log By Bhanaviya, Charlotte, Kenna, Evan, Arjun, Ethan, Janavi, Karina, Austin, Lin, Jayesh, and Omar Meeting Log January 05, 2019 Today's Meet Objectives
Today's goals include lowering the latch on Superman so that it becomes more hook-friendly, taking a team picture, and re-assigning presentation slides.
Today's Meet Log
Fix latch system
On the robot, Evan lowered the latch system so that the system would be compatible for the hanging task. After the latch...
Task: Create barriers to prevent the linear slide from falling
Recently, we added polycarb barriers to our linear slide system. They were created as a temporary measure by bending the polycarb with a blow torch and are less exact than we would like.
I originally tried to overlap 3 rectangles, and Creo didn't register it as an enclosed shape and wouldn't extrude. For any geometric shapes you want to extrude,...
We implemented OpenCV support in our code, but we hadn’t tested it until now. Upon testing, we realized it didn't work.
The first problem we found was that Vuforia wasn’t reading in our frames. The queue which holds Vuforia frames was always empty. After making lots of small changes, we realized that this was due to not initializing our Vuforia correctly. After fixing this,...
Off-Schedule Meeting Log, Winter Edition January 03, 2019 By Ethan, Evan, Karina, Abhi, and Arjun
Meeting Log (Week of)January 03, 2019
We have quite a few tasks this week, including:
Latch design
We've had an idea for a latch for a while. We started with the simple hook pictured below, but it was just that, a start. We want to move on to bigger and better things. So, we designed a new version, displayed below the hook.
Task: Look at the commitment changes over time of our team
It's a new year! And, with this new year comes new tournaments, new experiences, new projects, and more. But, to grow, one must reflect. Iron Reign's had a pretty big year, from going to Worlds to the prospect of a new MXP. And, while we can't analyze every possible aspect of the team, we can look at our stats page and differences from last year...
We recently refactored our vision code to allow us to easily swap out vision implementations. We had already implemented TensorFlow, but we hadn't implemented code for using OpenCV instead of TensorFlow. Using the GRIP pipeline we designed earlier, we wrote a class called OpenCVIntegration, which implements VisionProvider. This new class allows us to use OpenCV instead of TensorFlow for our vision implementation. Our code for OpenCVIntegration is shown below....
Iron Reign has been working on multiple vision pipelines, including TensorFlow, OpenCV, and a home-grown Convolutional Neural Network. Until now, all our code assumed that we only used TensorFlow, and we wanted to be able to switch out vision implementations quickly. As such, we decided to abstract away the actual vision pipeline used, which allows us to be able to choose between vision implementations at runtime.
Task: Allow the robot's arms to stand on their own
The issue with the lift is that many of the pieces that need to be made require specificity that’s hard to obtain using aluminum parts, so we chose polycarb. The key to making these specialized parts is a small butane torch held at just the right distance. Run the torch back and forth across the part where you want to bend, in the...
Meeting Log December 22, 2018 By Charlotte, Ethan, Janavi, Bhanaviya, Evan, Arjun, and Abhi
Meeting Log December 22, 2018
Today's Meet Objectives
Our goals for today include a battery box, repair and improvement of our intake system, and organization.
Today's Meet Log
Intake redesign
On the robot, we are resizing the intake system as a whole so that it folds in completely and fits within the 18 by 18 sizing requirement. Our biggest focus today was on...
We now have a lift and an intake system, but we're missing a way to hold onto and deposit the minerals after intake. To achieve this, we created a prototype.
We wanted to create a box-like shape that can be attached to a moving axle to hold the minerals when lowered. When the lift is up in the air, the axle can rotate...
Task: Create locks to keep BigWheel's intake arms in an extended position
An important part of this year's challenge is scoring minerals in the lander. Additionally, our upright elbow cannot raise the scoring mechanism to the lip of the lander alone. Thus, we had to create a way to get those additional inches to score.
First, we tried a REV linear slide design. This worked, but...
Task: Create a charging station for our phones and batteries
A long time ago, in a land far, far away, Iron Reign once had a battery box. This was a fabled land, where all batteries remained charged and phones roamed the land, happy and content with their engorged batteries. But, this land was neglected, with the meadows of electricity growing dim, the plastic of the land cracking and scattering to the...
Task: Detail TIG welding plans and why they failed
At the beginning of the season, we saw that our robot base was not as well crafted as we originally thought it to be. While we have worked to correct it over the season, it’s still not what we wish to see in a functional robot, and we came up with the idea of making the frame from light aluminum instead of...
Objective: Determine the type of intake system that will allow us to efficiently obtain and deposit minerals within the lander
In our post "Selecting Lift System" we decided that the linear slide system that we will use is the MGN12H rails also referenced to as the Ball-Bearing slides. These slides while heavy provide the smoothest option. now that we have chosen the Lift system we need to determine the intake system that will allow us to...
Task: Test the amount of wear on a moving nylon part over time
After our last tournament, we noticed several 3D-printed sprockets that had worn down significantly. So, we wanted to measure how much wear one of our nylon sprockets takes per second.
First, we printed out a model of one of the REV sprockets, using the STEP file here. We printed it with ~45% infill, our average...
This is a follow up to Post E-64, Code Issues Break the Superman Arm. We made some hustles and got them fixed. We reinforced Superman by ganging up multiple gears (as seen above) and repeated a similar process with the elbow arms. Hopefully this will make BigWheel more secure, especially with software limits in the code.
Task: Analyze the code issues that led to our robot breaking
After constant use, our robot's Superman arm broke. At this point, it is important to analyze our failures. This error was not because of a build issue but rather a code and driver control issue.
When testing, we always heard the gears grinding some times and we thought it wasn't an issue. There were instances like once when...
We've had some issues with our nylon sprockets, mainly through excessive wear and tear. So, we want to test what circumstances cause what deformation.
Linear Deformation
This one was simple. We printed this block with 60% infill (the highest infill we tend to use), measured its length (3.75") and hung one end from our deck. On the other end,...
Objective: Determine the type of lift system will allow us to delatch and reach the lander
In our past post Choosing Drive Train we decided that we will use the chassis BigWheel. After deciding the base we need to now think about the lift system that we want to use to allow us to both deposit into the lander and latch onto it. Evan and I have been experimenting with linear slides to use for our...
Meeting Log December 01, 2018 By Charlotte, Ethan, Kenna, Evan, Abhi, Justin, and Bhanaviya
Meeting Log December 01, 2018
Today's Meet Objectives
We plan to prepare for a few events coming up, the tournament we are going to host at Townview and our presentation to the Dallas Personal Robotics Group. As well, we plan to continue building our robot and improve on the superman arm in preparation for our next competition in January.
Task: Measure the coefficient of friction of our oven mitt intake
We want to measure various constants of materials on our robot. Earlier this season, we found that a nylon-mitt collision on our intake sapped the rotational energy of our intake. But, that was just a build error, easily fixable. But now, we plan to measure the energy lost from particle-mitt collisions, and the first part of this is to find the coefficient of friction...
Task: Design sideshields for the Townview Tournament
Iron Reign takes pride in the Townview Tournament; we really enjoy making it a great experience for everyone. One small way we plan to improve the tournament is to turn our MXP into a robot repair shop for broken robots. In addition to this, we're turning CART Bot into an ambulance to carry broken bots that need repair. To do so, we're wiring a...
This is a document for analyzing what we can do better, not just what went wrong at the Conrad qualifier. The format of this will be in issue > solution format.
Prep
Lack of tools and parts
Pack tools the week before - involves better organization overall
Bring failsafes & extra parts - prevents costly errors
Meeting Log November 17, 2018 By Charlotte, Karina, Kenna, Janavi, Evan, Justin, Ethan, Arjun, Bhanaviya, and Abhi
Meeting Log November 17, 2018
Evan working on the robot!
Today's Meet Objectives
We are going to discuss multiple facets of our team (presentation, engineering journal, organization, etc) with alumni Jayesh and Lin. What we hope to gain out of our conversation is an outside perspective. In addition to this conversation we wish to continue in our reflection of the...
Conrad Qualifier Post Mortem - Short Term By Ethan, Bhanaviya, Janavi, Charlotte, Kenna, Arjun, Justin, Janavi, Karina, and Abhi
Task: Analyze what went wrong at Conrad
Iron Reign didn't necessarily have the best time at Conrad. As shown in last week's tournament post, the day had its ups and downs. Even though it was a successful tournament overall, there's much that we could do better.
So, Iron Reign is used to using off-the-shelf materials on our robot: silicone oven gloves, ice cube trays, nylon 3D-printed parts, and more. But, we've never actually done a thorough investigation on the durability and efficacy of these parts. Because of this, we've had some high-profile failures: our silicone blocks breaking on contact with beacons in RES-Q, our nylon sprockets wearing down in Relic Recovery, our gears grinding...
Code Post-Mortem after Conrad Qualifier By Arjun and Abhi
Task: Analyze code failure at Conrad Qualifier
Iron Reign has been working hard on our robot, but despite that, we did not perform well owing to our autonomous performance.
Our autonomous plan was fairly simple: perform sampling, deploy the team marker, then drive to the crater to park. We planned to use the built-in TensorFlow object detection for our sampling, and thus assumed that our autonomous would be fairly easy.
Conrad Qualifier By Ethan, Charlotte, Karina, Janavi, Bhanaviya, Abhi, Arjun, Evan, and Justin
Task: Compete at the N. TX Conrad Qualifier
Right off of a mortifying experience at the Hendricks MS Scrimmage, in which we got the worst score at the tournament (and in the one match we did participate in, our robot broke) we walked in on shaky ground. In the week leading up to the tournament, Iron Reign worked hard, with 35 commits to the...
Today, we built mounts to attach both types of intake to the rack; the rack-and-pinion corncob intake and the red-flapped intake. We also created a new way of mounting the arm to the chassis. The idea is that since it’s attached to the rack and pinion track, it reaches high enough for the robot to put the minerals in the lander. We made the arm with a 12-86 gear ratio....
FTC released new code to support Tensorflow and automatically detect minerals with the model they trained. Unfortunately, all of our CNN work was undercut by this update. The silver lining is that we have done enough research into how CNN's work and it will allow us to understand the mind of the FTC app better. In addition, we may retrain this model if we feel it doesn't work well. But now, it...
For extension both into the crater and lifting our robot up to the crater we have decided test a linear slide system. We plan to utilize linear slide system for both vertical and horizontal extension on MiniMech.
After seeing how well the robots that could latch onto the lander performed at the scrimmage, Iron Reign knew that we had to be able to score these points. We originally tried lifting with a linear slide system on MiniMech, but it was not strong or sturdy enough for the small chassis, and would definitely not be a functional system on BigWheel in time for competition. And so we...
Historically, Iron Reign has used a class called "Pose" to control all the hardware mapping of our robot instead of putting it directly into our opmodes. This has created cleaner code and smoother integration with our crazy functions. However, we used the same Pose for the past two years since both had an almost identical drive base. Since there wasn't a viable differential drive Pose in...
Meeting Log November 03, 2018 By Ethan, Charlotte, Evan, Janavi, Kenna, Karina, Justin, Arjun, Abhi, and Bhanaviya
Meeting Log November 03, 2018
Today's Meet Objectives
So, we have one week before our first tournament. This isn't great. As you can see on our last blog post, we didn't do amazingly at the scrimmage. So, we have a lot of work to do.
Today's Meet Log
First and foremost, we have to work on our presentation. So, we...
In 2012 I began competing in FTC. That year our team built a robot with a giant central arm on top of a six wheeled drivetrain that sported a ring bucket that the rings would slot into one or two at a time. The idea was that we would go bit by bit, slowly moving the rings onto the rack in the middle. This was...
Bigwheel’s intake arm is one of the most important parts of the robot. Since our scrimmage, we have learned how to make this arm much more efficient, starting with some supports. The original intake arm was made of two scrap Tetrix rails. The result of this was that the two sides of the arm would be out of sync, creating a twist in the arm that caused...
DISD Scrimmage at Hedrick MS By Charlotte, Janavi, Ethan, Evan, Justin, Karina, and Abhi
Task: Compete at the Hedrick MS DISD Scrimmage
Today, Iron Reign competed in the DISD scrimmage at Hedrick Middle School. This was the first scrimmage of the year, so experienced teams and rookie teams alike struggled to get a working robot on the field. We go to this scrimmage every year, and it helps us gage just how much needs to be done...
Off-Schedule Meeting Log October-2 23-2, 2018-2 to October 23, 2018 By Ethan, Karina, Charlotte, Kenna, Arjun, and Evan
Meeting Log October 21 to October 23, 2018
Iron Reign will be attending a scrimmage on Saturday, but to attend a scrimmage, you usually have to have a working robot. As of Saturday, we did not. So, a few of our members elected to come in on Saturday to do some last minute robot additions.
Meeting Log October 20, 2018 By Charlotte, Kenna, Janavi, Ethan, Arjun, Justin, and Abhi
Meeting Log October 20, 2018
Juggling the minerals
Today's Meet Objectives
Our first scrimmage is next weekend, so we need to complete our chassis and some sort of intake system. Every member needs to take on their own portion of the robot so we can divide and conquer to end today's meeting with a working robot.
We created the corn-cob intake a few weeks ago. Unfortunately, it was a little too big for the Minichassis, so we had to downsize. So, we designed Intake Two. Continuing our history of using kitchen materials to create robot parts, we attached two silicone oven mitts to a beater bar equipped with Iron Reign's REVolution system. Then, we attached a...
Task: Begin rewriting the Convolutional Neural Network using Java and DL4J
While we were using Python and TensorFlow to train our convolutional neural network, we decided to attempt writing this in Java, as the code for our robot is entirely in Java, and before we can use our neural network, it must be written in Java.
We also decided to try using DL4J, a competing library to TensorFlow, to write our neural network,...
Over the summer, we designed many robots for the North Texas Chassis Project, including one based off of last year's Worlds robot, Kraken. The robot chassis had 6" mechanums. But, based on what we know about this years challenge we have decided that this chassis does not utilize the 18-inch cube effectively.
We have chosen to design a chassis that is similar in function to Kraken, but smaller...
Meeting Log October 13, 2018 By Charlotte, Janavi, Ethan, Arjun, Abhi, Justin, and Karina
Meeting Log October 13, 2018
Sumo bots at SEM STEM Spark
Today's Meet Objectives
Today we are taking part in a massive outreach event to teach STEM to girls all over North Dallas: SEM STEM Spark. However, we do have competitions/scrimmages coming up really soon, so we wish to get some substantial building done. See more about the event at (T-22, SEM STEM Spark).
Task: Begin developing a Convolutional Neural Network using TensorFlow and Python
Now that we have gathered and labeled our training data, we began writing our Convolutional Neural Network. Since Abhi had used Python and TensorFlow to write a neural network in the past during his visit to MIT over the summer, we decided to do the same now.
After running our model, however, we noticed that it was not very accurate. Though...
BigWheel has gone through a few major changes. First and foremost, it now has a flipper arm, AKA Superman. Since the robot itself is the lift mechanism, we had to put a lot of work into Superman's design. Right now it is a 10 inch REV rail attached to two 125-tooth gears for redundancy, with a custom 3D printed mount housing an pair of omniwheels on the other...
Task: Improve Iron Reign's team organization and time management
Iron Reign sometimes struggles with our team organization and time management. There have been many instances where we have fallen behind in different subteams due to this lack of organization. This year, in order to tackle this downfall, we are going to put an emphasis on project management.
We started a project in a program called Team Gantt. We learned how to...
So, our dream this year is to create a static robot. Last week, we found out about a rule change that would prevent our mining robot from staying within the crater. Naturally, we found a way around this, leading us to the Mining Base 2.0.
The robot will be fixed under the lander's hooks, and have a horizontal and vertical linear slide attached to...
Task: Upgrade our code to the latest version of the FTC SDK
FTC recently released version 4.0 of their SDK, with initial support for external cameras, better PIDF motor control, improved wireless connectivity, new sensors, and other general improvements. Our code was based on last year's SDK version 3.7, so we needed to merge the new SDK with our repository.
The merge was slightly difficult, as there were some issues with...
Meeting Log October 06, 2018 By Charlotte, Kenna, Janavi, Ethan, and Arjun
Meeting Log October 06, 2018
Code Testing with Arjun
Today's Meet Objectives
We set up some tables with FTC Starter Kits for our new recruits so we can give them an introduction to building with REV parts. We want to continue research & design and build for Iron Reign. There is a scrimmage coming up in a few weeks, so we want to have a...
Task: Label training images to train a Neural Network
Now that we have software to make labeling the training data easier, we have to actually use it to label the training images. Abhi and I split up our training data into two halves, and we each labeled one half. Then, when we had completed the labeling, we recombined the images. The images we labeled are publicly available at Read More
At one point, we were thinking about creating a "mining facility" robot that stays static within the crater and delivers the blocks into the mining depot. In our eyes, it was legal as it would hold as many blocks as possible inside the crater but only deliver two at a time outside. It would be super-efficient as we would be able to stay within the crater, and not...
Last week, we decided to take up the task of creating the team marker, a simple project that would surely be overlooked, but can score a significant amount of points. We wanted the marker to be meaningful to the Iron Reign, but also follow the team marker rules. To start, we made a list of ideas:
Last season, Ducky (as seen in idea #4) brought...
Right now, we're working on a static-deposit system. The first part of this system is having an intake mechanism that passively differentiates the balls and cubes, reducing complexity of other parts of the design. Thus, we created the corn-cob intake.
First, we bought ice-cube trays. We wanted a compliant material that would grip the particles and be able to send them...
The ice cube tray is 9 holes wide and each hole is 16.50mm wide and long. Using these measurements, we created an aligner that would cause the ice cube tray to roll into a cylinder.
We're designing an intake that will allow the robot to intake particles, and this is a major portion. This will allow us...
Task: Create wheel mounts for our Mini-Mecanum chassis
Today, we modeled two possible designs for mini-mecanum wheel mounts. The purpose of the mounts is to hold a churro or hex shaft in place to mount mecanum wheels to. The first design was a 6cm by 6cm square with rounded edges that was 5mm thick. A hexagon was removed from the center to hold the churro that supports the mecanum wheel. This design,...
To increase the efficiency of our robot, we looked into ways to passively sort minerals during intake and deposit. It is important to sort because it requires less precision under driver control allowing a faster and more efficient robot. Though bulky, we designed an initial design to sort the minerals.
When this piece is mounted and both blocks and balls are...
Task: Designing a program to label training data for our Convolutional Neural Network
In order to use the captured training data, we need to label it by identifying the location of the gold mineral in it. We also need to normalize it by resizing the training images to a constant size, (320x240 pixels). While we could do this by hand, it would be a pain to do so. We would...
We've been toying around with the idea of using BigWheel, our Summer Chassis Research Project bot, in this year's competition with a few modifications. The idea for this robot is that it has a collection system that extends into the crater, and folds up on top of the robot. It reaches in with the collection arm, and grabs the blocks/glyphs, drives backwards and flips vertically using the drive wheels as a...
Meeting Log September 28, 2018 By Charlotte, Karina, Kenna, Janavi, Evan, Abhi, Justin, Ethan, and Arjun
Meeting Log September 28, 2018
Coding lessons with new recruits
Today's Meet Objectives
Since our overflow of new recruits, we have opened up two other teams 15373 and 15375, which Iron Reign will mentor and lead along with our mentorship of 3732 Imperial Robotics, who has also received new recruits. Today we plan to continue integrating them into FTC; we will begin teaching...
Hanging Hook Prototype By Abhi, Ethan, Justin, and Janavi
Task: Design a hook for pulling the robot on the lander
To get a head-start on latching and delatching from the lander during autonomous, we got a head start and made some hook prototypes. If your robot can just do these two things, you can score 80 points. When making this hook, it needs to be modular enough to not require much accuracy but also needs to be...
With the high point potential available in this year's autonomous it is essential to create autonomous paths right now. This year's auto is more complicated due to potential collisions with alliance partners in addition to an unknown period of time spend delatching from the lander. To address both these concerns, I developed 4 autonomous paths we will investigate with to use during competition.
Meeting Log September 22, 2018 By Charlotte, Janavi, Evan, Abhi, Justin, Ethan, Arjun, Karina, and Kenna
Meeting Log September 22, 2018
Home Depot Trip!
Today's Meet Objectives
As we are starting to make more serious strides in our robot and strategy, we wish to start passing down knowledge to our new recruits. Today, we are going to continue prototyping with grabbers and various linear slide kits and we need to discuss strategy and organization for this season....
At the moment, we've used the same chassis base for three years, a basic mechanum base with large wheels. However, we don't really want to do the same this year. At the time, it was impressive, and not many teams used mechanum wheels, but now, its a little overdone.
Thus, we have BigWheel. We used this as a practice design, but we ended up really...
Task: Capture training data for a Convolutional Neural Network
In order to train a Convolutional Neural Network, we need a whole bunch of training images. So we got out into the field, and took 125 photos of the sampling setup in different positions and angles. Our next step is to label the gold minerals in all of these photos, so that we can train a Convolutional Neural Network to label the...
Task: Consider potential vision approaches for sampling
Part of this year’s game requires us to be able to detect the location of minerals on the field. The main use for this is in sampling. During autonomous, we need to move only the gold mineral, without touching the silver minerals in order to earn points for sampling. There are a few ways we could be able to detect the location of the gold mineral.
Meeting Log September 15, 2018 By Charlotte, Karina, Kenna, Janavi, Evan, Abhi, Justin, and Ethan
Meeting Log September 15, 2018
Today Austin, an Iron Reign alumni, visited us from A&M! :)
Today's Meet Objectives
As our brainstorming and discussion continues, we are putting our ideas into action and making various prototypes and designs. We will continue to work with our new recruits and let them participate in a meaningful way with our building and in...
We had another brainstorming session today, which allowed us to break down into some new building tasks.
Intake System 3 - TSA Bag Scanner
This part of our robot is inspired by the bag-scanning machine in TSA lines, more specifically the part at the end with the spinning tubes. The basic design would be like a section of that track that flips over the top of...
Objective: Determine the type of wheel that best suits the chassis
In the Choosing Drive Train E-16 we decided that we will use the chassis BigWheel. We know that our wheels need to be light weight but we need to determine the size of the wheel that will keep our robot far away enough from the ground for us to provide enough clearance to allow us to climb over the crater rim. But, if we choose wheels...
In our last post, we created a chart where we listed each task asked based on point value and the level of difficulty, separated by autonomous and teleop. Our goal is to find a drive train that will allow us to build a robot to accomplish all of these tasks efficiently and consistently, but this matrix will allow us to determine what to focus on first.
In our first practice, we brainstormed some intake and other robot ideas. To begin testing, we created a simple prototype of a one-way intake system. First, we attached two rubber bands to a length of wide PVC pipe. This worked pretty well, but the bands gave way a little too easily.
For our next prototype, we attached a piece of cardboard with slits to...
Rover Ruckus Brainstorming & Initial Thoughts By Ethan, Charlotte, Kenna, Evan, Abhi, Arjun, Karina, and Justin
Task: Come up with ideas for the 2018-19 season
So, today was the first meeting in the Rover Ruckus season! On top of that, we had our first round of new recruits (20!). So, it was an extremely hectic session, but we came up with a lot of new ideas.
Post Kickoff Meeting September 08, 2018 By Karina, Charlotte, Ethan, Evan, Kenna, and Abhi
Meeting Log September 08, 2018
Today Iron Reign attended the FTC 2018-2019 season kickoff at Williams High School. After the event, we gathered back at our coach's house to talk about how we might approach this season's challenge. We welcomed prospect team members as well. They joined us in reviewing the reveal video and the games manuals.
Task: Present in the Inviational Presentation Series
Today, we participated in the Chassis Presentation workshop for teams all around the North Texas region; the project was to design robots and perform various tests with them, then present findings. We presented our chassis, Garchomp, a mechanum wheel chassis as can be seen in the slide photos below.
As a new freshman on Iron Reign, I took on the responsibility of a robot we called Bigwheel. Karina and I worked on getting the robot into something that could be put through load tests, meaning tightening the chain, fixing misaligned sprockets, and getting the wiring together. We participated in the Chassis Presentation workshop hosted by technicbots for teams all around the North Texas region to work on one or more...
We've been working on a design for the chassis workshop for quite a while now. We already presented it at the first meeting, and now we need to work on the other components of our presentation: the weight testing, torque calculations, speed testing, and finally, a chassis model. To do the last one, we made a simple model in PTC Creo.
Hello all! You might have been wondering where I went the entire summer while Iron Reign was busily working on tasks. Well for those of you interested, I was invited to spend a month at MIT as part of the Beaverworks program. I worked in the Medlytics course and analyzed medical data using machine learning methods. This seems distant from the work we do in FTC but...
In our last post, we thought that we had finished Garchomp. However, as we came back to the next practice, we realized that Garchomp's chains were incorrectly linked.
So, we started to diagnose the problem. We noticed that the old REV rails we were using had dents in them, which caused the motors to shift, therefore causing the chains to come off the gears.
C.A.R.T. Bot Summer Project By Evan, Abhi, and Janavi
Task: Enhance our robot-building skills
At Iron Reign, we hate to waste the summer since it’s a great time to get all the ridiculous builds out of the way. Thus, we created C.A.R.T. Bot (Carry All our Robotics Tools). Our constant companion these last few seasons has been our trusty Rubbermaid utility cart which has been beaten and abused, competition after competition, as it carried all our tools...
Task: Design a program to record and replay a driver run
One of the difficulties in writing an autonomous program is the long development cycle. We have to unplug the robot controller, plug it into a computer, make a few changes to the code, recompile and download the code, and then retest our program. All this must be done over and over again, until the...
Summer Chassis Project - July Meeting By Kenna, Ethan, Charlotte, Karina, Shaggy, and Abhi
Task: Compare & Collaborate on Chassis
At Big Thought's offices in downtown Dallas, three teams met. Technicbots (Team 8565), EFFoRT (Team 8114), Schim Robotics (12900), and Iron Reign are all part of the North Texas Chassis Project. The goal is for each team to create any number of chassis and improve their building skills by learning from the other teams.
This is Iron Reign’s world-championship robot from last season. The basic rundown is this:
Weight - 42 lbs
Size - 18x17.8x17.5 inches
Drive - Mecanum
Main parts kit - REV
Iron Reign uses two design processes in conjunction with each other to create efficient and reliable parts: iterative, continual improvement and competitive design.
An example of these design processes working in conjunction is the process of...
During Relic Recovery season, we had many problems with our autonomous due to slippage in the mecanum wheels and our need to align to the balancing stone, both of which created high error in our encoder feedback. To address this recurring issue, we searched for an alternative way to identify our position on the field. Upon researching online and discussing with other teams, we discovered an...
This summer, we're working on creating unique chassis that are outside of our comfort zone. Often we choose safe bases - opting for ones that we have tried in the past and know work. But, taking the opportunity to explore unique bases allows us to see their performance. One of our ideas is for a two-wheeled robot, with two large wheels and one, smaller, non-motorized omniwheel. We think that...
Over the past week, I worked with Christian and another member of Imperial to prototype a drive train. Due to the limited resources. we decided to use Tetrix parts since we had an abundance of those. We decided to make the swerve such that a servo would turn a swerve module and the motors would be attached directly to the wheels.
Last season, we saw many robots that utilized a swerve drive rather than the mecanum drive for omnidirectional movement. To further expand Iron Reign's repertoire of drive bases, I wanted to further investigate this chassis. Swerve was considered as an alternative to swerve because of its increased speed in addition to the maneuverability of the drive base to allow for quick scoring due to its use of traction wheels at...
UIL 2018 By Abhi, Karina, Evan, Janavi, Austin, Justin, and Shaggy
Task: Attend the 2018 UIL Robotics Competition
Background
For those who don't know, UIL Robotics is the premier state robotics competition for Texas. Iron Reign has been a beta-testing partner since its inception, and this year was the event's first year as a full-fledged program.
To participate in UIL, a team must win at a Regional level, and have a good overall showing. This...
We have been working on this chassis for over 3+. In out last post, we had thought the wheels were ready to go. However, various parts, such as wheel mounts, had been put on backwards or were unusable so we had to do everything over again. Now that the robot has wheels, we started on attaching the REV expansion hub and battery....
2018 Worlds Day Three By Ethan, Evan, Kenna, Austin, Charlotte, Abhi, Tycho, Karina, Justin, Janavi, and Shaggy
Task: Compete in robot game
It was the beginning of Day 3. We awoke, covered in metal parts and broken servos, took our sleeping-caps off, and went off to the Houston Convention Center.
Game 82
We won this game, 467-442. This was personally, our best game. We went against the BLUE CREW and won, which was no small...
2018 Worlds Day Two By Ethan, Evan, Kenna, Austin, Charlotte, Abhi, Tycho, Karina, Justin, Janavi, and Shaggy
Task: Compete in robot game
It was the beginning of Day 2. Our members rolled out of bed, covered in old Fiesta receipts and Chipotle wrappers. One by one, they stumbled onto their charter bus, unprepared for the new day.
Game 26
We lost this match, 213-401. Our robot wasn't working reliably on the field and we were...
2018 Worlds Day One By Ethan, Evan, Kenna, Austin, Charlotte, Abhi, Tycho, Karina, Justin, Janavi, and Shaggy
Task: Present and play first match
It was a dark, surprisingly non-humid, Houston morning. Tarballs blew through the parking lot from dusty, abandoned oil refineries down by the bay. One by one, phones went off in the hotel looming above the lot, waking up their inhabitants. In these rooms, their occupants dusted off their Bucees wrappers and Iron Reign shirts and stumbled to the...
After a season of work, Iron Reign has the final version of Kraken ready for Championships. With it comes a video showing off its features. We filmed it moving in all sorts of ways. We also found pictures from this season of the team's design growth and outreach events, including having fun. You can view it here below!
Tired of slipping set screws? Want a rigid drive shaft as long or tall as your robot? Have a bunch of REV Rail lying around? Have we got a solution for you...
Turn your REV Rail into a beater-bar, a drive shaft or a heavy duty hinge with our Spintastic Axializer System … The REVolution System
Iron reign has developed these parts over the course of this...
Task: Determine the acceleration and max velocity experimentally
To find the acceleration and maximum velocity of our robot we decided to use a method we have learned in our physics class at school: video analysis with Logger Pro. The procedure is like so: Take a video of the robot head on with a still camera. In the video, in the same frame of movement as the robot, hold a known measuring device (ruler/meter stick). Insert the...
As explained in a previous post, we were having many issues with git commits and fixing our errors in it. After a lot of the merging conflicts, we had to fix all the commits without exactly knowing what was being changed in the code. Part of the reason this was so hard was our lack of good naming conventions. Though we always try to make a title and good...
This is the fifth or so article in our series on robotics testing. Today's spotlight will be on the constants of our robot's bungees, and how they're affected by various wear and tear. So, we took three bungees from the same set as the ones on our robot, and placed them in various places: stretched outside, stretched inside, and a control sitting in the...
Two words describe the picture above: "Oh dear". The wires shown above are connected to our jewel thief on the bottom of our robot. The reason the wires are so shredded and torn is because the chain on our grippers would rub against the wires when the lift was in the lower position. However, it was not always like this.
Task: Find constants for the motors for future calculations
In order to better predict how our robot will work, we first need to find a few constants to do calculations. Luckily, our school has an engineering class, so many of us have the skillset to do these calculations.
The base data we needed was: NeverRest 40s: &tab;160 rpm\16.755 rad/sec &tab;369 oz-in\2.6057 Nm NeverRest 60s: &tab;105 rpm\10.996 rad/sec &tab;593 oz-in\4.188 Nm REV Servos:...
South Super Regionals 2018 Postmortem By Charlotte, Ethan, Tycho, Austin, Janavi, Abhi, Karina, Kenna, and Evan
Task: Reflect on our accomplishments in South Super Regionals
Judging
Strengths In previous presentations, we have had difficulty with timing and conveying everything we have to in the allotted time. This time, we got all of our information across and had enough extra time for some questions and good discussion with the judges.
When we went to Super Regionals, we forgot about where to put our flag with the new design. That led us to strapping a zip tie to a side shield, ruining the aluminum aesthetic. We decided we need a specially designed part to put our flag in since duct tape didn't look nice (we're classy like that). I embarked on a mission to create a...
We always struggle a little with describing our robot to the judges. So, this post will be the third in a series of posts describing the physics of our robot (four if you count the coefficients of friction). First, we have the free body diagrams of the gripper.
Next, to further describe this, we created an expiriment in which we determined the maximum...
By this stage of Relic Recovery, we have finally discovered an efficient strategy for the glyph game. At this point, it is important to get consistent driver practice. While doing so, it is important to think of the cipher patterns. Seeing that world records are being set by teams who can double cipher efficiently, it is important that we can complete ciphers at Worlds. But which pattern should we...
Kraken LED Installation By Ethan, Austin, Evan, and Abhi
Task: Install LEDs on our robot
This has been a low-priority task for the robot throughout the season. We wanted to be able to a) look cool and b) signal team color and problems with the robot with LEDs. And, at Supers, we just happened to have access to a Fender switch, servo, and a roll of LEDs, so in our downtime we decided to take advantage of it. If we knew...
South Super Regionals Day Three, 2018 By Ethan, Evan, Kenna, Charlotte, Austin, Karina, Janavi, Abhi, Tycho, Justin, and Christian
Task: Finish SSR and attend awards ceremony
It was the final day. Tumbleweeds drifted over the land, rolling and turning through the abandoned Athens streets. Over the horizon, a dust cloud rose, brown and shifting and twisting, speckled with the detritus of an abandoned city, flashing and siezing, lighting up the city through its inky blackness, devoid of...
South Super Regionals Day Two, 2018 By Ethan, Evan, Kenna, Charlotte, Austin, Karina, Janavi, Abhi, Tycho, Justin, and Christian
Task: Complete the first day of competition at SSR
After finishing judging and setup, all we had left to do was the entire robot game. Knowing this, we stayed until 12, tattooing pictures of Minions™ on each other. Thus, we were perfectly prepared for the tournament the next day.
South Super Regionals Day One, 2018 By Ethan, Evan, Kenna, Charlotte, Austin, Karina, Janavi, Abhi, Tycho, Justin, and Christian
Task: Set up and present at SSR 2018
A placid stillness hung over the dark, cold room. The early sun flashed through the pale window curtains, ineffective against the onslaught of light. Outside, birds started to chirp and sing, starting off the new day. All over the city, teams were waking up, walking to the Classic Center (the...
So, its Supers time again! And that means its time to design our tents and pick a theme for ourselves. Last year, when Iron Reign went to Supers for the first time, we got to see all of the other teams' displays; before, we had only been to regional level competitions and weren't ready for the displays at Supers. We saw the coolest tents and got some really cool trinkets. For example, one...
Progress of the Octopuckers Over Time By Ethan and Tycho
Task: Chart the progress of the octopuckers over time
This design was too rigid, we overlooked the fact that triangles tend to be the strongest shape, and therefore this octopucker wasn't as compliant as we wanted, damaging the blocks. This design was really good, and we used it for 3-4 tournaments. Our initial design of these wouldn't damage the blocks significantly at the levels...
Task: Make team informational posters for South Super Regionals
Last year, we didn't spend that much time on the poster/aesthetic side of things for Supers, and we ended up getting the Judges' Award. While we can't really prove a cause-and-effect relationship between the two, we want to improve in all aspects so we don't repeat last years performance. So, this year, we're going to try to convey more information to the judges so that we can bolster...
With SuperRegionals just around the corner, everyone is going into overdrive and we almost forgot about our video for the Promote Award. We got lucky with the due date being extended for the South, so we had two extra days to make ours.
We wanted to this year's Promote Award video to be a little different from last year's....
Recently, we've been having an issue with our gripper in that the shielding for the sides of the intake have been bending torsionally, so that they deform and interfere with our glyph take-up. So, we created a lab to find the torque required to cause this deformation.
We cut a length of polycarb with a similar width but different length to test this (thickness...
Task: Evaluate how well Iron Reign has stuck to its priorities
As Super Regionals approaches, we'd like to evaluate our past performance on post mortems, to see how well we've done, to modify our future post mortems, and to find new approaches towards solving our problems.
Task: Design and implement a new Relic Arm mechanism
At the North Texas regionals, we realized that if we really want to go further in the robot game, we need to significantly improve. Part of this is designing the new grabber-flipper system detailed in a later post, but another good way to score points is to score the Relic. So, we designed v1 of the Relic Arms, as detailed in this post....
Oklahoma State Regionals 2018 Postmortem By Charlotte, Ethan, Tycho, Austin, Janavi, Abhi, Karina, Kenna, and Evan
Task: Evaluate our strengths and downfalls at Oklahoma State Regionals
It wasn't a great regional, but it wasn't a bad one either, it was an OK Regional.
Preparation
Strengths Because we had already been to North Texas Regionals, we were one step ahead of the teams in OK that hadn’t been to a regional yet this year in that sense....
We've talked to REV before about our unique REVolution system that we've detailed in other posts, but for those who are unaware, its a system that we've personally designed to turn REV extrusions into axles, which enable us to have more flexibility in design. But now, we've designed a flyer to get people on board with the system.
Recall the discussion and design strategy regarding our wheel mounts
The side shield design process involved much thought and discussion. We have experienced difficulty with the wheel mounts we have been using, which are the ones from last year. These are made of a composite of nylon and aluminum, but they are too thick and consume a lot of space on our already large robot. Also, the our new Mecanum wheels are thicker...
Task: Implement the new grabber system and record how it works
So, we've been talking about our new gripper system for a while - we've made prior 3D models and started it, hoping that we'd have it done by the Oklahoma Regional, since that was sort of a low stakes tournament for us. Unfortunately, we didn't get it just in time, so we had to go back to the basic...
Task: Prepare for the South Super Regionals in Athens, Georgia
We currently have a bit over two weeks to get ready for the South Super Regionals, and we're not quite ready. Actually, if we want to get competition-ready, we've got a long way to go. From prior experience, we're currently 55% on awards and 45% on robot game for advancement, but we want to get both to 60-70+%. So, we created a list so...
Our grabber is good, but it isn't achieving 100% of the potential it could. One thing we're doing is creating the Grabber V.5 previously blogged about, but we also want to increase the speed of the grabber in other ways, in order to get every single bit of performance out of our robot, since we want to really impress at Supers. So, we designed star-grabbers. The purpose of...
Oklahoma Regionals, 2018 By Ethan, Evan, Janavi, Charlotte, Abhi, Tycho, Austin, Karina, Kenna, Shaggy, and Justin
Task: Compete at the Oklahoma Regional
In November, we went to a Oklahoman qualifier in Mustang. The reason for this was purely strategic - by competing in multiple regions, we have more chances of advancing, as well as having more in-tournament experience overall. There, we got 2nd-place Inspire and advanced to the Oklahoma Regionals. Then, when we came back to Dallas,...
North Texas Regionals 2018 Postmortem By Charlotte, Ethan, Tycho, Austin, Janavi, Abhi, Karina, Kenna, and Evan
Task: Reflect on The Good, The Bad, and The Ugly of our performance at North Texas Regionals
Preparation
Strengths Some of our team members put in a lot of hours of work the night before the competition and we were able to successfully prepare the robot for the robot games.
Weaknesses Though it proved very necessary, the fact that people had...
North Texas Regionals, 2018 By Ethan, Evan, Abhi, Tycho, Janavi, Charlotte, Austin, Karina, and Kenna
Task: Win at the North Texas Regionals
Introduction
All over the city, lights turned on. In each house, a member departed, on their way to a secretive location, Iron Reign headquarters. Each member entered the HQ, took a parcel, and boarded the equally secretive Iron Reign Mystery Bus, on our way to an even more undisclosed location, the North Texas...
It was a temperate night. The waning moon shone overhead, a blazing reminder of the continuity of time, for as the moon dipped lower in the sky, our precious little time until the tournament dripped away. Under this oppressive, singular symbol, we labored, trying to outpace the continual march of time.
Over the past week, we had worked tirelessly on the robot. In...
Designing Grabber V. 4.5 By Ethan, Evan, and Austin
Task: Build an Updated Grabber System
So, we probably won't finish both the Grabber V.5 and the Flipper designs by the North Texas Regional this Saturday, but we really need to improve our grabber system so that we have a chance of doing well in the robot game. From our last post-mortem, we decided that while our grabber performed *well*, it obviously could have been better. So, in...
After analyzing the lack of speed from our last competition, we decided to continue the journey of attaching the gripper arms to a conveyor belt as previously designed. To do so, we realized that we needed to utilize the REVolution system to make the grippers work better. Also, we needed two points of attachment for our robot after seeing that one didn't work with the first version of the...
As the season wears on, the robot game looms over Iron Reign since the bot we built scores only a fifth of the world record. To lessen the gap, we continue to invest in the flipper system I contrived earlier on in the season. As of late, we’ve furthered the project by building a chassis for it to rest in. It’s a slightly modified version of the one...
Friction Coefficients of Various Materials By Ethan
Task: Test Friction Coefficients of Various Materials
Introduction:
Iron Reign has used many different materials in years past. In those years, we usually preferred materials which were more durable. We started with ABS, but while hard, it was relatively brittle. We attempted to use Filoflex and Ninjaflex, and they were more durable, but too soft. Finally, we had used nylon for the past seasons, as it was extremely durable but...
Wylie East Qualifier 2018 By Ethan, Evan, Charlotte, Janavi, Karina, Tycho, Austin, Abhi, and Kenna
Task: Compete at the Wylie East Qualifier
Introduction
It was a cold and dark morning. The howling winds of a cold front rushed through the grass. Under this cover of darkness, one car after another pulled up to a house, dimly lit. A car door would open for a second, letting a child out into the cold night. Under these auspicous conditions,...
Prepping for Wiley By Janavi, Karina, Ethan, Charlotte, Kenna, Abhi, Austin, Tycho, and Evan
Task:
It was countdown time before the competition, we had to practice driving our robot, pack the MXP, and practice our presentation. So we decided to split up into smaller groups to accomplish more. Tycho, Charlotte, and Evan drove together to practice communicating quickly and effectively. They also played against our sister team so both teams could get practice with other robots...
Over the course of this past season, I have been learning how to use Creo Parametric to learn 3-D modeling. Since this is Tycho's last year on the team (so far he has been our main modeler), I decided to learn from him so the modeling legacy would continue.
The first project I was tasked to design was the wheel guard on the robot....
One of our issues with the previous iteration of the gripper was the fact that the material that coated the actual pincers weren't even and would often lead to blocks slipping from the bottom of the gripper and falling out. Our solution to this was to retest materials and in this process we decided to try our hand at 3D printing...
When we designed our new grabber with the octopuckers, one of the variables we neglected was the width of the new grabber once assembled and resting. After the grabber was completed it’s width was actually greater than that of the housing bay we had built into the current drive train, so to get the grabber to fit we actually had to widen the bay....
Meeting Log January 06, 2018 By Ethan, Evan, Charlotte, Kenna, Tycho, Austin, Abhi, Karina, and Janavi
Meeting Log January 06, 2018
So, today's the last Saturday before the Wylie Qualifier, and we're pretty unprepared. We're a little behind on our blog posts by about a week, we still haven't added our octopucker attachment, and we need to finish our 3D model of our robot.
After making significant development on our robot, we decided to model it. So far, we have developed the chassis of the robot seen below
To develop this, many types of contraints were used.
The entire model is dependent on this tetrix bar. The bar was constrainted using the Default feature since it was the base of the model. To this, the lift...
We have finally completed assembly modeling Kraken, Iron Reign's Relic Recovery robot. Named after the sea creature due to the robot's OCTOPUCKERS, Kraken stands as a fierce competitor in FTC.
To the chassis, we added the glyph system mounting. We first designed a linear slide replica and constrained that to a small TETRIX U connector piece which attached to the REV rail base. On the other side...
The world advances on innovation. We strive to make the most efficient devices and aparati to complete jobs for us. There’s a hundred different ways to work a task, but only one will be the best at functioning in the areas of efficiency and timeliness. Just as America runs on Dunkin, advancement runs on efficiency. That’s why the robot must be outfitted with a flipper system...
Washers can be used as spacers. They are also used to smooth out the rough top layers. Keep the bed very clean and smooth and the bottom surface of parts should be very slippery against other nylon. Put these in between the rough top bearing surface of one part (with rough surface facing rough) and the smooth bottom surface of the next part, and the friction...
This shows customized version of the Dual Rail Plate. This is for our 4th generation rolling gripper system. The small ears are designed to hold a long M3 bolt that have a stack of mini ball bearings on them. These ball bearings squeeze our timing belts together, forcing them into a more oval shape, but still allowing them to glide. This reduces friction quite a...
This is the standard bearing / bushing that allows a REVrail to rotate inside a plate. It is typically coupled with a glide washer and two stops to bind it to an attachment plate or pillow block.
End caps are stops placed at the end of a REVrail. Five of the holes are for M3 bolts that can be screwed into the standard holes in the cross section of the extrusion. We highly recommend tapping these holes and then using threadlock to retain the bolts. So far we’ve only had to use a single bolt since we haven’t experienced very large forces The...
This is our REV0lution 20 tooth sprocket for #25 chain. This took a lot of trial and error to get right, because it was the component most sensitive to our print settings. We had to inset the tooth profile quite a bit because any extra material created by perimeter settings would cause the gaps between teeth to be too small for the chain to fully engage,...
The jewel thief we built before *worked* but that was about it. More often than not, it failed or, even worse, knocking off the wrong jewel due to instability. And, in the Greenhill Qualifier, we lost several rounds because of a problem that could've been easily fixed. So, we had to redesign it.
The jewel thief was initially intended to be simple. It...
This is a standard pillow block. We had to add adhesion pads to the ends because the nylon would curl away from the print bed. But these are easily cut off with a hobby knife.
The dual rail plate allows you to couple the rotation of two REVrails together. The distance between the holes should be based on how you are coupling them together. This model is designed to use GT2 5mm pulleys and a 46 gap timing belt.
This GT2 pulley has rounded teeth that engage nicely. GT2 pulleys and timing belts are the most common in use with 3D printers - but those are usually of the 2mm pitch variety. We didn’t think our printer would be able achieve the fine detail accuracy needed to print at that size, so we went for the 5mm pitch belts. On our printer we can take this...
Version 2 of our gripper arms worked much better than our original. Due to their silicone material and trianglular shape, we definitely had more control over the glyphs than our one degree of freedom grabber arms. However, we still had issues we needed to address. When glyphs were taken in, since the silicone surface did not have much mobility and compressibility, glyphs would often fall. Due to slight...
Oklahoma 2017 Post-Mortem By Ethan, Evan, Tycho, Austin, Janavi, Kenna, Abhi, Charlotte, and Karina
Task: Recap what went right and wrong in Oklahoma
Even though we did very well in the Oklahoma qualifier, we still encountered several problems, that if not addressed, could lower our chances of getting to Super-Regionals. So, we had a team discussion on what to do differently in the next tournament, and what to keep constant.
At the Oklahoma qualifier, we saw numerous teams with similar systems to that of ours. However, since we had the mobilized gripper arms to stack with auto alignment, we were able to collect glyphs easier. In spite of that, after observing other teams in action, we realized our current gripper method had the issue of not being ready by the time we got back to the cryptobox. This is...
Spring Cleaning in the RoboDojo By Janavi, Evan, Ethan, Austin, Tycho, Karina, Charlotte, Kenna, and Abhi
Task:
A few weeks leaving for our Oklahoma competition we assembled a large garage tent upon the pool deck and moved our field inside the tent to shield it from the weather. The night before the competition we moved in a projector so we could project see the code on the wall and left it there when we went to Oklahoma. We were very surprised...
On Nov. 17, we went to the Oklahoma Mustang HS qualifier. Our strategy for this tournament was to attempt to qualify in multiple regions so that we have more chances to get to the South Super Regionals. For...
The basters are here and in full swing. We spent a late night putting together the two intake columns. They were attached to a backing by previously, allowing to finish it by attaching the final servo and tieing it to the two columns. Since the new intake needed new code, we whipped up some code to allow us to have control. Upon doing this he realized...
Task: Learn how to Assemble parts in Creo Parametric
In addition to making parts to print in Creo, it is sometimes useful to combine multiple parts to make a model. For example, we can make a robot model by assembling parts in Creo. We have conducted a video on how to do so.
For this tutorial, we first created two simple parts...
The task today was simple. We replicated the prior work with the first gripper, as stated in the prior post, so we can begin connecting them. The biggest problem was finding all the parts to make it. We are hoping we can connect and mount them in the next couple days so it will be ready for the qualifier in Oklahoma. The improvement over last post was the addition of the rubber gripping material, as...
Today we tried to drive the robot on the practice field for the first time since the qualifier last Saturday. However, we couldn't get in very much quality drive practice because the robot kept breaking down. We decided to dig a bit deeper and found some issues.
As seen above, the first thing that was wrong was that the lift was tilted. Due to the cantilever orientation of the...
Greenhill FTC Qualifier By Ethan, Evan, Tycho, Charlotte, Austin, Abhi, Tycho, Karina, and Kenna
Task: Compete at our first FTC qualifier
So, we were absolute failures. There's no way to get around that. We got 14th place out of 14, and our presentation flopped. But, its not the end of the world, even if it may feel like it. We have another qualifier in Oklahome in one week, and we need to analyze what we did wrong...
Iron Reign has existed, in one form or another, for the past eight years. We have competed in FLL, Google Lunar X Prize Challenge, and now, FTC.
While our team originated at WB Travis Vanguard and Academy, we are now hosted by the School of Science and Engineering at Townview, in DISD. Despite our school being 66% economically disadvantaged and being...
Task: Determine building strategy for Relic Recovery
Any well-versed team understands that, depending on the competition for the year, a robot will either be modified to compete or be built from the ground up. In any case, however, a robot often starts at its chassis, and teams have multiple companies that provide solutions to the common robot chassis’ needs and specifications. To name a few: AndyMark® has its standard kits that include all the...
The jewel thief, the mechanism for knocking off one of the jewels, was going to be one of the tougher parts of our bot to integrate, based on the chassis we began with. But, with a little engineering and some long thought, we came up with a few ways to implement it. First, we began with a side mount, and it was alright...
PTC Creo Parametric is one of the best software to 3-D model tools that we can print out. I will detail how to create a part in Creo for both our team and any other teams who need help creating a piece. For this demo, Creo Parametric Academic Edition was used along with a pre designed model of the part.
Standard parts were used to create the backbone. Then, we bent some tetrix parts to connect the backbone to the servos. We used continuous rotation cervos to solve the issue mentioned earlier. This was a fairly easy build but we still have a ways to go before V2 is completed.
This gripper will be far superior to our prior designs in that it will be...
Meeting Log November 03, 2017 By Ethan, Evan, Tycho. Austin, Charlotte, Karina, Janavi, Kenna, and Abhi
Meeting Log November 03, 2017
Today is one of the last full meetings until our tournament, so we need to get everything ready for judging. This post also includes the objectives for the next week.
Refering back to the design of the wheel guard, we decided it was time to actually mount it on the robot. At first, it seemed like the part was perfect for the robot since it fit just snug with the screws on the wheel. However, upon mounting, we discovered the following:
Turns out that the part is acutely shorter than the real height of wheel relative to the horizontal axis superimposed upon the vertical plane. As a...
Since damaging field elements is a huge no-no, we needed to fix this, we decided to create a 3-D part to protect the glyphs from our wheels
Model:
During the first attempt, I had just self taught Creo hours prior to construction. As a result, I was not very precise nor efficient in my design. Nevertheless, we recognized that there were some basic shapes we could use for construction such as a semicircle for the bottom half and two rectangles on the...
Because our robot at this point has merely become a collage of prototypes that we compete with, there are often subtle improvements that need to be made. Starting with the wheelbase, Abhi has written a blog about the shields we printed to protect the glyphs from the gnashing bolts of our mechanum wheels, and we also tensioned all our set screws and motor mounts to make sure that our...
Today we continued our work on the second grippers. We talked about this in another post, but the gist is that we iterated through various materials to find something that would securely grip the block, without damaging it. At the beginning, that got rid of most of our options, but we tested various sprays, materials, and pressures to find the right material. The baking pan liner was...
With our single degree of freedom lift fastened to the robot we focused on the appendage that would grip to within an inch of its life any glyph we fed it. We initially toyed with simple tetrix channels to form a make shift rail that would hold axels for pivoting points, however we found tetrix to be a bit too cumbersome and decided to use rev...
Task: Design the grabber design and make future plans
The grabber has been evolving. A column made of a turkey baster and a wooden dowel attached to servo has come into fruition. The first drawings and designs are coming along, and some 3D printed parts have been thought up to allow the square dowel to become a hexagon. An adapter of sorts. The grabber and lift have been outfitted with a...
Though our current gripper is working sufficiently, there are some issues we would like to improve in our second version. The mounting system is unstable and easily comes out of alignment because the rev rail keeps bending. Another issue we've encountered is the cervo pulling the grippers so that they begin to cave inwards, releasing any blocks being held at the bottom. By far the biggest problem is...
The games have begun and it’s time to build. So that’s what Austin and I did. A war had been declared. Legions of the indentured collided on the battlefield. Millions were slaughtered during this new age armageddon. Austin had his army. I had mine. Two different ideas to do the same task: lift glyphs into their correct positions. A simple job but one that caused a rift in...
After determining that the treaded channel was much too buggy to perfect with the time we had, we shifted attention to other scoring systems like grabbers, however before finding the right grabber we decided we needed to get the track for it completed first. We’ve had experience in the past with all sorts of rails from Tetrix kits that convert their standard channels into lifts, to the newer...
In an attempt to get a working lift system before the coaches meeting we will be presenting at, a linear slide has been attached to the robot, along with a pair of grabbing arms. They work surprisingly well and aren’t as complicated as my idea. Plus the importance of speed has really taken hold on me this year. We need to be as fast...
Meeting Log September 23, 2017 By Charlotte, Kenna, Tycho, Austin, and Evan
Meeting Log September 23, 2017
We started the day by volunteering at LV Stockard MS, another DISD event. During our practice, we planned to work on robot design, blog updates, and code testing.
Over the past couple of days we’ve experimented with a horizontally mounted track system that we had hoped would serve to move blocks through the entire length of the robot and into the crypto box. Immediately we noticed a few issues, the primary one being that the tread was static in terms of mounting and therefore wasn’t accepting of blocks when feed at an odd...
The sun came out and it was back to the field. We got started right away, both of us building our designs. Since the cryptoboxes were wider than the 18 inch sizing cube, we started by designing a fold out for the conveyor belt. This was entirely proof of concept, purely to see if it was at all aplicable in the game...
Meeting Log September 16, 2017 By Ethan, Evan, Karina, Tycho, Austin, Charlotte, and Kenna
Meeting Log September 16, 2017
Today we had a major outreach event at Conrad HS in DISD which served around 450 people. We also planned on continuing our building competition, working on strategy, the blog, and the robot teardown.
Task: Compare build designs for the cryptobox intake system
The block scoring system is going to be an integral part of the competition this year, and it will have to built sturdy. It’ll have to be reliable for us to have any shot of winning any matches. So we got to brainstorming. We spent a while at the whiteboard, drawing up various mechanisms and ways to pick up blocks. One idea was the idea...
Meeting Log September 09, 2017 By Ethan, Evan, Abhi, Tycho, Austin, Karina, and Kenna
Meeting Log September 09, 2017
Today was the first meeting of the Relic Recovery season. Our main focus today was strategy, then organization and getting the robot ready for this year's challenges
layout: Do not touch. title: Title of your article (you can't use hyphens or colons.) tags: Enter as comma seperated list, case insensitive. Try to use one award and one normal tag
Tips - tips and tricks for other teams.
Journal - working on the journal, blog, and posts like this one.
Outreach - volunteering and special events. Ex. Moonday, NSTA
Mechanical - work on the robot, parts, building,...
UIL Robotics 2017 By Ethan, Evan, Tycho, Charlotte, Austin, Omar, and Janavi
Task: Compete in the UIL Robotics 2017 State Tournament
The UIL Robotics State Tournament is a Texas-only invitational based upon a team's performance in Texas qualifiers and regionals. Since we preformed so well in the North Texas Regionals, winning the first place Inspire Award, we qualified for UIL as well as Super Regionals.
While the tournament is planned with FIRST's help, it differs...
South Superregional - Day Three By Jayesh, Tycho, Omar, Max, Darshan, Austin, Charlotte, Lin, Evan, Ethan, and Janavi
Task: Reminisce on our last three Superregionals matches
Our final competition day began with the driver team rushing to the pits because of a warning given by the game officials for the first match's teams to reach the pits earlier than expected. We reached in time, in fact about an hour before the match actually began. This mild inconvenience did give us time to formulate a strategy against our opponents, the...
South Superregionals Day Two By Max, Tycho, Omar, Jayesh, Darshan, Austin, Charlotte, Lin, Evan, Ethan, and Janavi
Task: Reminisce on our first six Superregionals matches
After a decent night's rest, we began Day Two at around 7 AM. A lot of our tools and materials were still on our RV, so we first moved them over to our pit. Our match schedule said that we'd have nine matches beginning with Match #1 (just our luck). After the...interesting Pokemon-themed opening ceremonies, we began the day with our first match.
Super Regionals - The First Day By Ethan, Evan, Tycho, Max, Jayesh, Janavi, Lin, Darshan, Omar, Charlotte, and Austin
Task: Go to super regionals, set up, and present
Way too early in the morning, on March 22nd, the Iron Reign team gathered in darkness. It was approximately 65 Farenheit and gusts around 12 mph were blowing in from the South. Under this cover of darkness, a bus pulled into our school. As the trees shivered in the wind and the stray...
One man's harrowing journey through copyright free music lists
The Robot Reveal video is underway. With most of the filming done, the sky grows dark and the day ends. A night time of editing sets in for the poor miscreant who volunteered for the task. Huddled in the corner with a raw fish and his precious computer, the boy opens premiere pro to begin. All is right with the world. The five hour...
Practice Laps By Omar, Jayesh, Tycho, Darshan, and Evan
Task: Get some organized driving practice in before Supers
With Superregionals drawing near, we thought it prudent to better organize ourselves in terms of driving teams. We've never felt that we were 100% solid, with people not knowing what to do at certain times in the match. For example, our "Coach" position was almost entirely dedicated to yelling out the match time in 10 second intervals. Today, we talked about...
Dallas Women in STEM By Lin, Tycho, Max, Jayesh, Janavi, Omar, and Austin
Task: Teach LEGO EV3 and 3D modelling to girls
The Yale club of Dallas organized a STEM event for groups of girls in the city. We took the Mobile Tech XPerience out front for 3D modelling and set up 8 EV3s with laptops and a sumo field inside.
Super Regionals Booth Design By Lin, Austin, and Omar
Task: Design a theme and layout for super regional pits
A year or two ago Imperial advanced to Super Regionals, bringing along a few Iron Reign members. While teams get excited and have a lot of fun at Regionals, it's nothing compared to the displays found at super regionals. We've grown into our cyber-Roman theme this season, and Omar is currently working on a logo to match our new color...
Judging and Awards By Lin, Jayesh, Omar, Tycho, and Max
Task: Increase chances to advance in judging
In our competitions we really can't rely on our robot performing as well as it does in practice and our sparring matches with Imperial. If we're going to increase our chances of advancing from Regionals to Super-Regionals 90% of the time it's going to be from judging. We've always had rocky presentations in my opinion, but this year we're getting our energy...
Forester Field House Robotics Competition By Janavi, Omar, Tycho, Max, Jayesh, Evan, Lin, and Darshan
Task: Compete in the Forester Field House Robotics Competition
We started off with our presentation pretty early, and everything was going pretty well until our robot had a static issue, and stopped working. We were able to cover it up pretty well without the judges noticing. One of the judges seemed to like our rap, and was interested in seeing the R.V. Our presentation ran a...
Arkansas Analysis By Lin, Omar, Darshan, Jayesh, Evan, Max, Tycho, Janavi, and Ethan
Task: Analyze what went wrong and right at Arkansas
We spent a good hour and a half analyzing what we needed to do differently at upcoming competitions, and how to better prepare in the upcoming school break.
Up to this point, we hadn't given much attention to a beacon scoring mechanism that we could use in both autonomous and tele-op. At the scrimmage we learned that scoring the beacons was almost vital to winning the match, and we couldn't do that. We rigged up a short u-channel on a plate and attached it to our robot, hoping we could just ram...
Task: Replace rubber bands with smaller versions and add wider intake area
New intake area is wider than before
At the Scrimmage we noticed that the rubber bands would get tangled as they rubbed against the underside of the catapult bowl, and so didn't reach as far down at the bottom. We untangled them before each match but decided to test out the smaller ones when we had the chance at...
First and foremost, we now have one completely functional, terrifying, catapult. The motor mechanism is cannibalized from our sister team's attempt at a catapult, which broke apart on testing.
Flywheel
So, while we don't have a functional flywheel as of...
Task: To build a launching mechanism for the particles
For the 2016-2017 season, particle scoring is really important. During autonomous, balls that are launched into the center vortex earn 15 points each, and balls that are launched into the center vortex earn 5 points. If done quickly enough, the particle scoring can negate most of the advantages another team has - just 8 particles scored during the driver-controlled period is equivalent to scoring all 4 beacons. With a good scoring mechanism, the only thing that your team...
Programming our New Robot By Tycho, Lin, Ethan, and Jayesh
Task: Program our new mecanum wheel driving platform
Now that our new robot has been built with a mecanum wheel platform, we can start write our drive code and figure out how to make our robot preform three basic motions: forwards and backwards, side-to-side and to rotate. We decided that, in order to get the best understanding of our robot,...
MXP Transportation By Darshan, Lin, Jayesh, Omar, Ethan, Evan, Janavi, Tycho, and Max
Oh the places you'll go!
We attend many events throughout the DFW area, taking our robot and whatever else we need along with us. This has often puts a strain in how much we can actually bring with us to FIRST events and STEM events in general. Over this past summer the team helped refurbish an old 90s RV to use as a Mobile Tech XPerience to drive...
Turn Up! at Frontiers of Flight with DCOL By Janavi, Darshan, Jayesh, Lin, Max, Tycho, Omar, and Austin
Inspiring 1,000 People to Turn Up with STEM
Written by Janavi Chadha
The Dallas City of Learning Organization held a Turn Up event at the Frontiers of Flight Museum, where we staffed the Mobile XPerience (MXP) complete with laptops, 3D printers, and LEGO SumoBots. Outside the vehicle, Lin and I taught kids how to create 3D models...
Hoverboards and PID By Lin, Omar, Darshan, Tycho, and Max
Task: Continue with the Hoverboard and tweak PID
After the long weekend last week, today was a reasonably relaxed practice. We decided that we could work on anything, as long we stayed focused. The two main foci were the -Robot on a Hoverboard- and fine tuning our PID for autonomous.
Reflections
We experimented with balancing the robot more evenly on the hoverboard to keep it on a straight path...
Day 1 was a huge success, and we carried that over into the Sunday presentations too. There were a lot of common questions we noticed from Saturday, including levels of robotics competitions and the LEGO EV3 system, and we were able to answer these with more clarity after hearing them so often. A few papers were set up on our table outlining the various FIRST competition...
Robot On a Hoverboard - Try 1 By Lin, Max, Tycho, Darshan, Omar, Evan, Ethan, and Jayesh
Task: Try to drive the hoverboard with the competition bot
In the middle of Saturday's event we decided it would be a GREAT idea to put the competiton robot on the hoverboard and try to drive it around. Theoretically if we got it centered correctly it could only drive forward and backwards. We could extend...
Presentation Runthrough By Lin, Max, Tycho, Darshan, Jayesh, Omar, Alisa, Ethan, and Evan
Task: Go through presentation with Mr. Gilkes
Our mentor Mr. Gilkes was kind enough to listen to us do a rough presentation run-through at practice. We hadn't looked at the presentation since the competition 2 weeks ago, and it was pretty obvious we were under-practiced. We swiped through the slides before starting to get our bearings.
Reflections
We started by making sure everyone knew their cues,...
Post Competition Goals By Jayesh, Omar, Darshan, Max, Tycho, Lin, Ethan, Evan, Dylan, Alisa, and Trace
Task: Discuss future goals and fixes needed to succeed at regionals and beyond
In the week following the competition, a Google document was made to discuss sections of building the team can improve on before the regional tournament. There was an outline made where every team member applied to certain sections that they felt needed to be improved upon. The different sections included robot chassis, the presentation, and game strategy. Members voted on item...
Nolan Qualifier By Ethan, Lin, Jayesh, Darshan, Max, Tycho, Evan, Alisa, Trace, and Dylan
Task: To review our last tournament
Beginnings
Due to the team taking a bus with Imperial Robotics, we arrived to the competition a little late. However, due to an organizer running late, the competition itself was delayed, so we weren't significantly affected. Like last time, we had trouble finding a power outlet that we could set up our battery box near, but it turned out there were a couple nearby. We were once again set up...
Competition Post-Mortem By Lin, Jayesh, Darshan, Max, Tycho, Evan, Ethan, Alisa, Trace, and Dylan
Task: Analyze our successes and failures in the previous competition
After a rocky start and finish to our first qualifier yesterday we took today to have fun as a team and look at how we could improve for our next chance.
Reflections
Most of our -Need To Do's- are related to becoming more confident with the various tasks that we'll be doing in the...
I Still Won on the Inside… 2016 FTC Qualifier at Wylie By Jayesh, Omar, Darshan, Max, Tycho, Evan, Ethan, Alisa, Lin, Trace, and Dylan
Starting out
Just as in previous years, Iron Reign set off about half an hour late. We REALLY need to get everything not directly on the robot printed, boxed up, and loaded the night before - at the latest. Now that we have 11 members, we needed another person to help carpool, and Jayesh’s dad was thankfully willing to help. (note from omar: we definitely did not...
Design and prototype a churro latch mechanism By Lin, Darshan
Task: Design an alternative churro climber mechanism
Currently Max and Tycho are working on a beater bar 3D part that is stiff enough to pull in blocks, and will hopefully double as a churro catcher when spinning. However, since the parts take 4 hours per set to print, and are harder to rapid-fire test and change and tweak relative to some other options we're going for other options till they're tested. The churro catchers help us to secure holding up the ramp but...


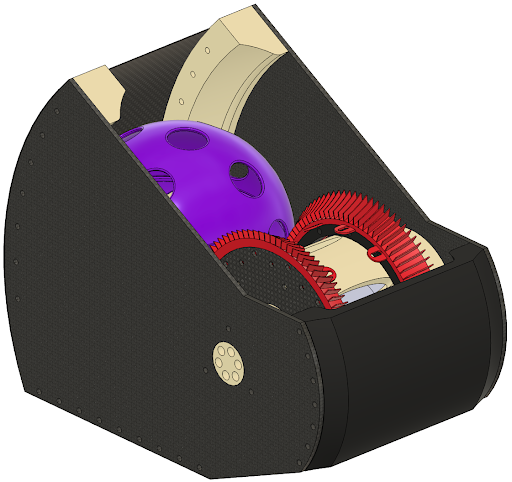

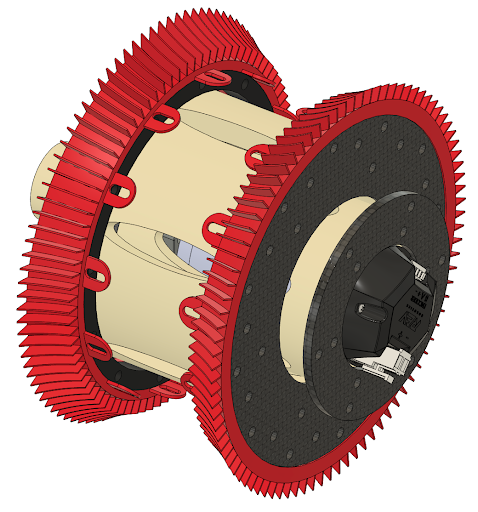
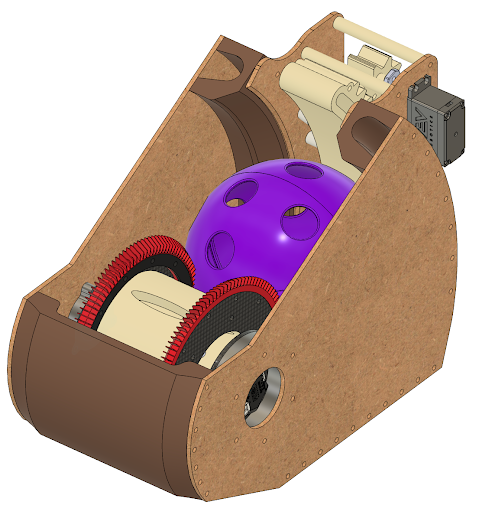
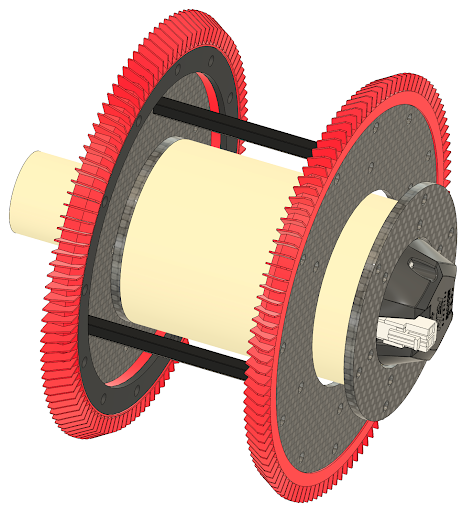
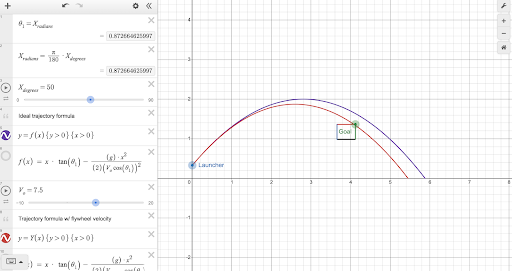
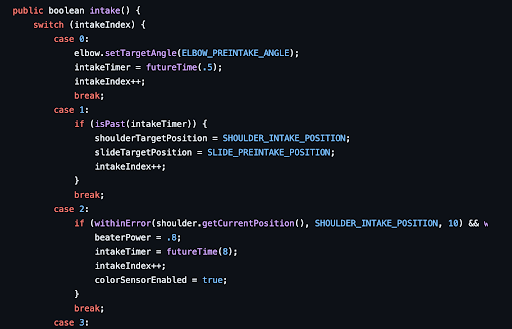 The beginning of our Intake articulation
The beginning of our Intake articulation 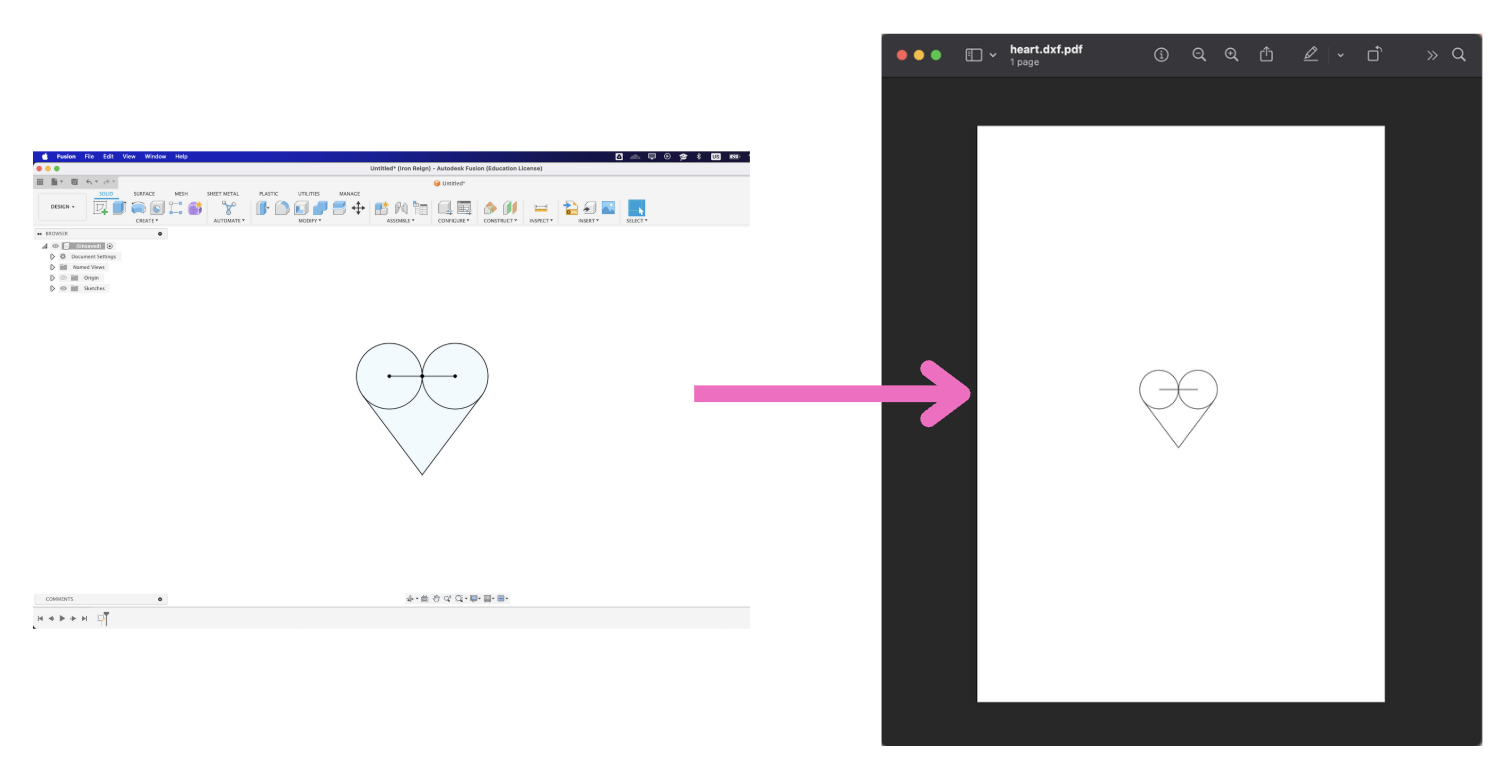
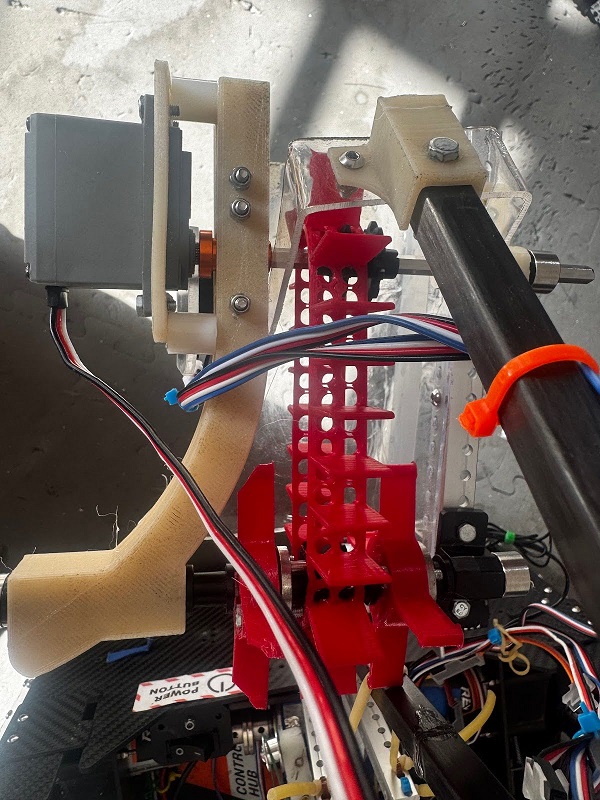

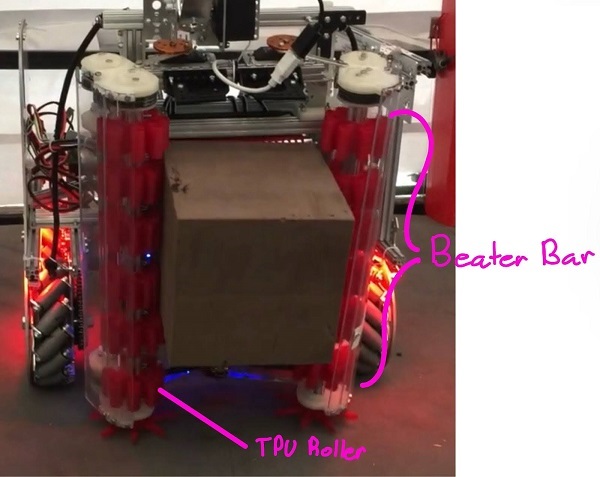
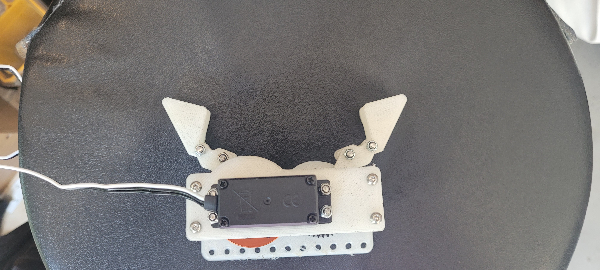
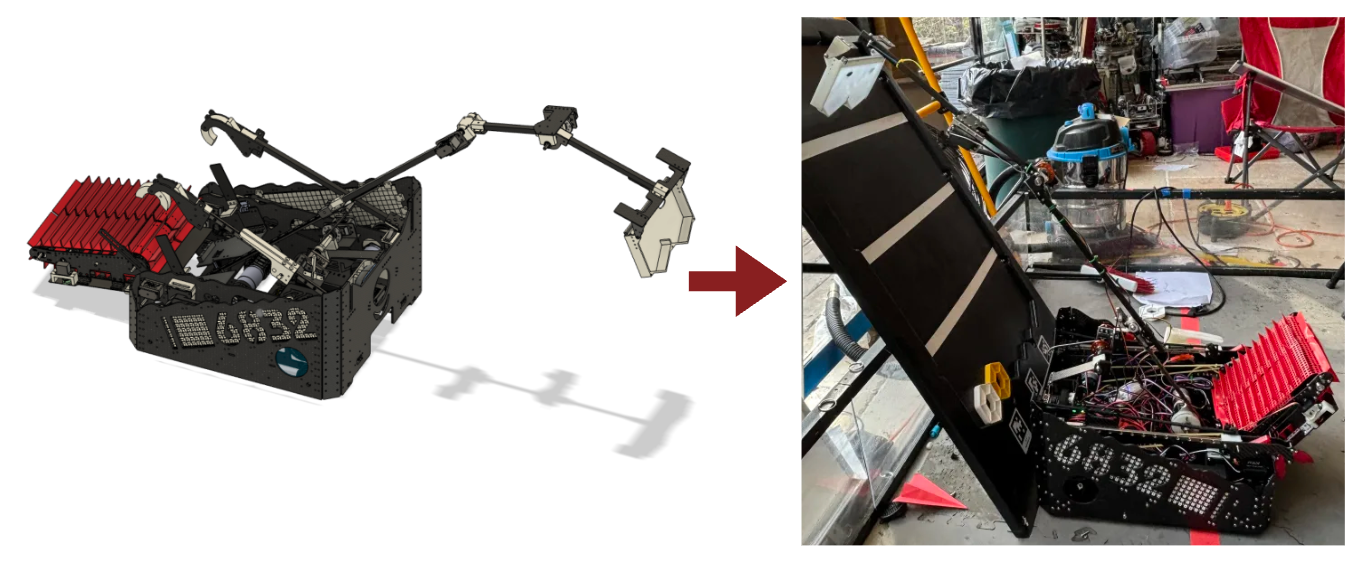

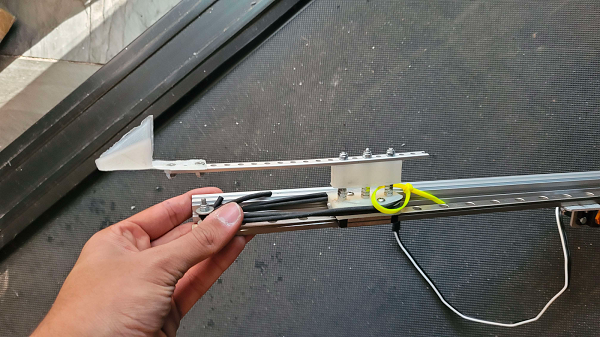



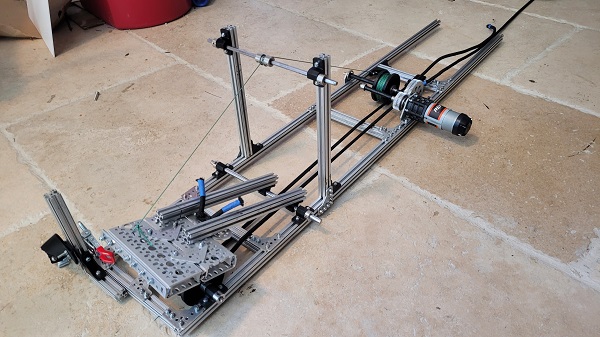






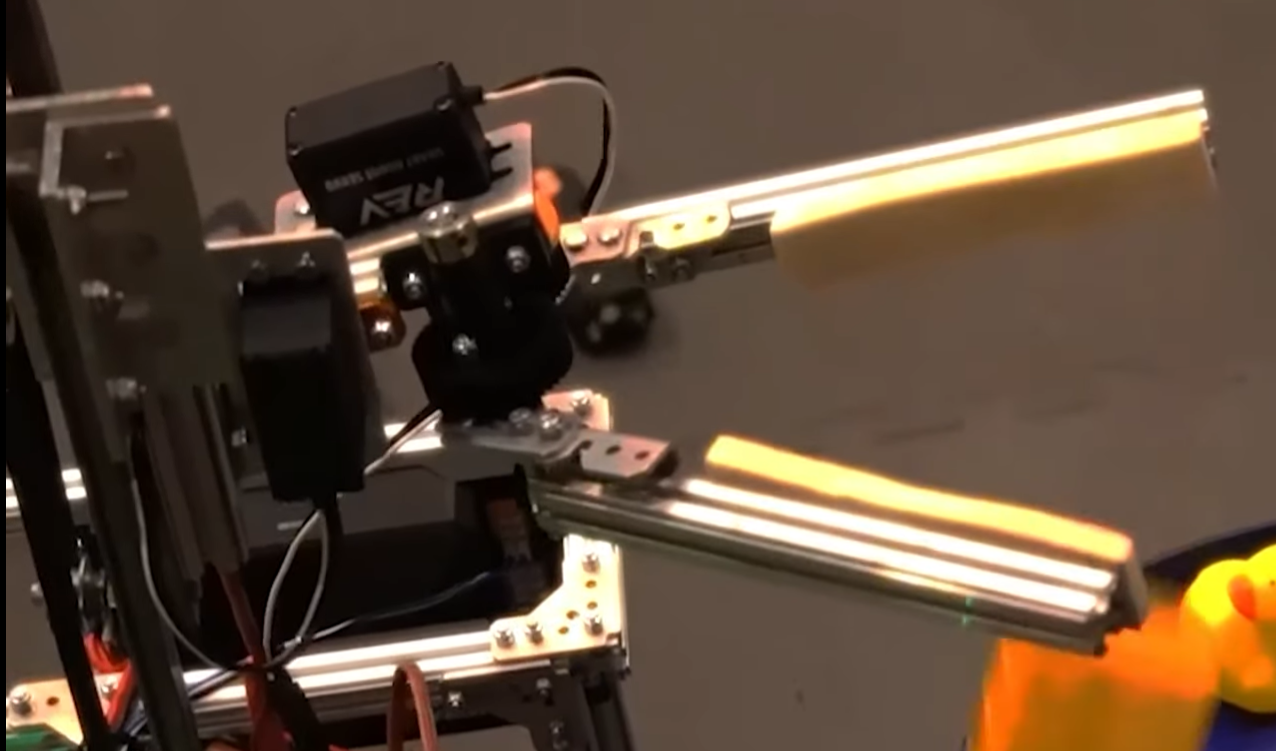
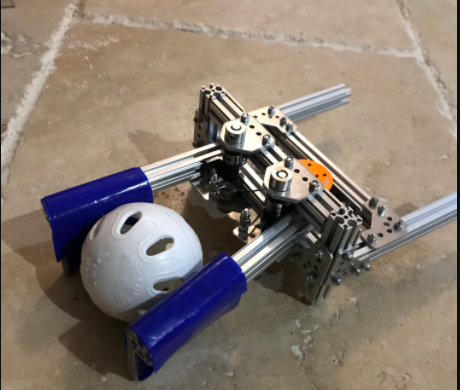
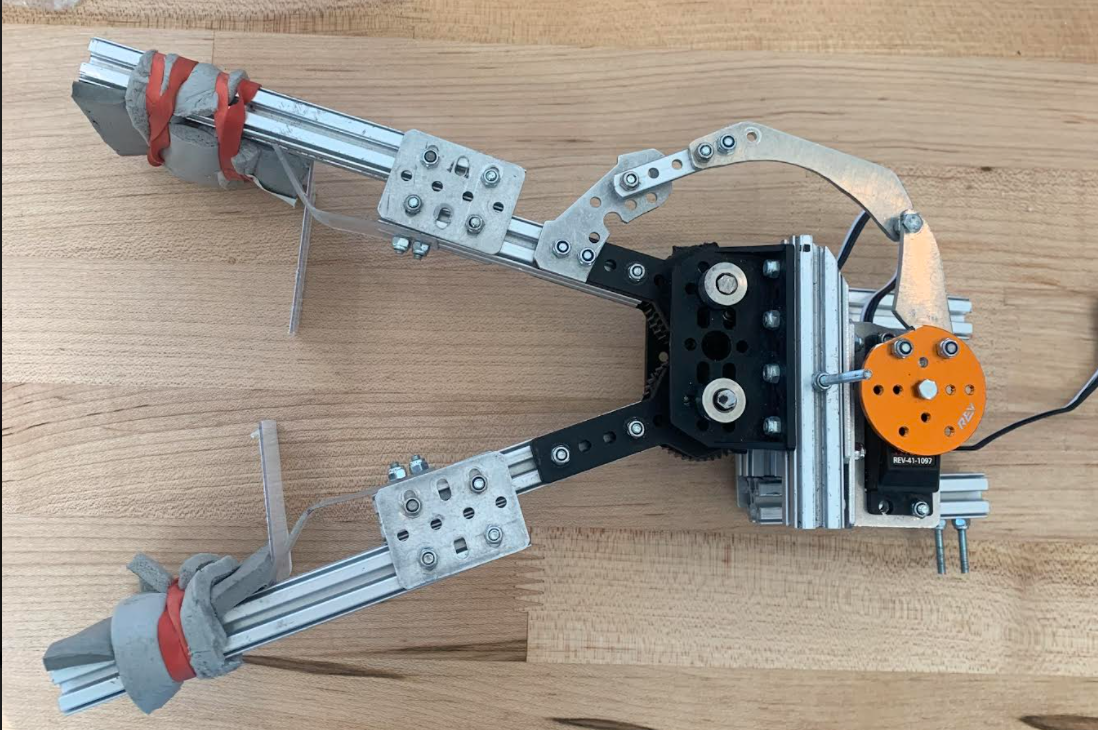
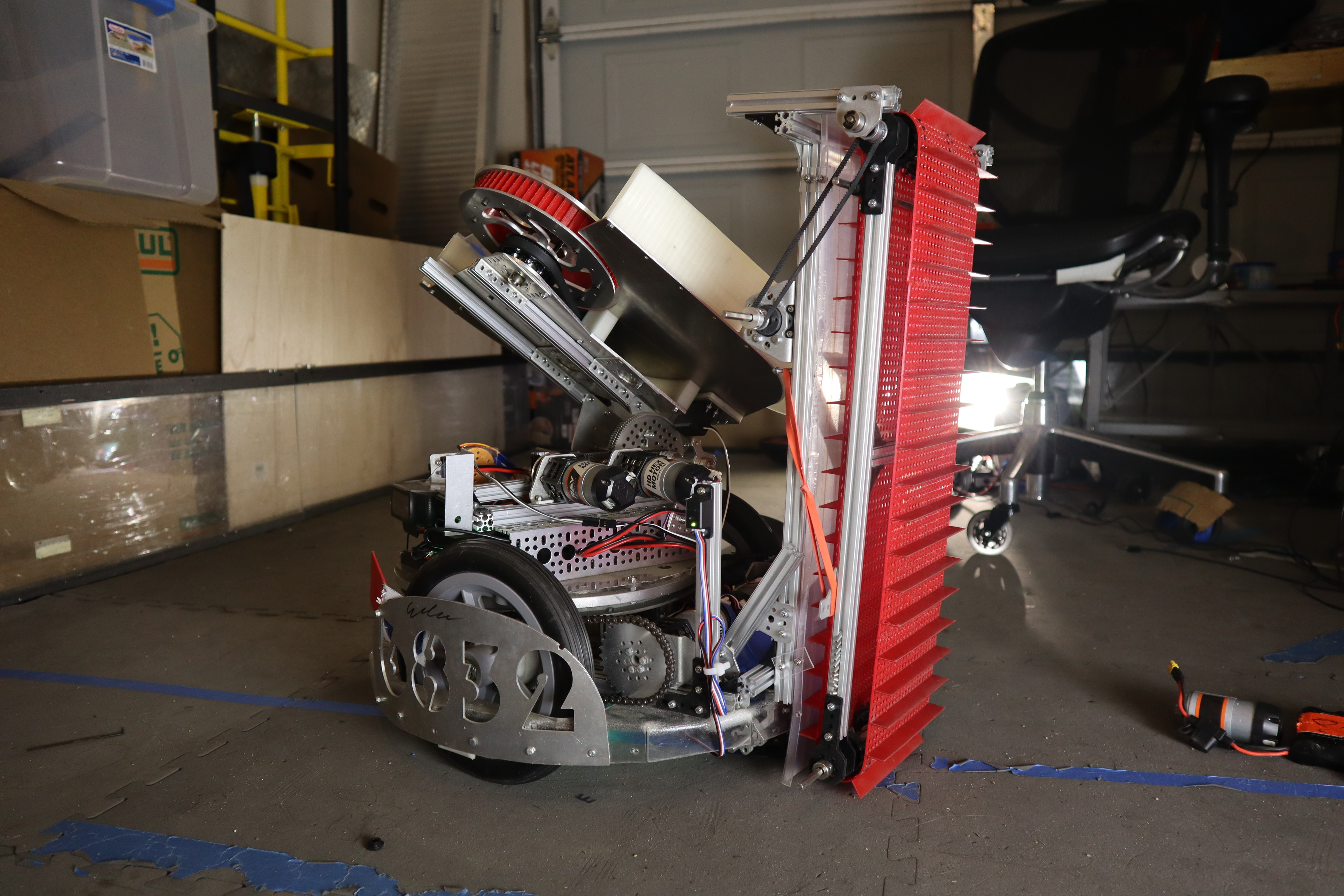
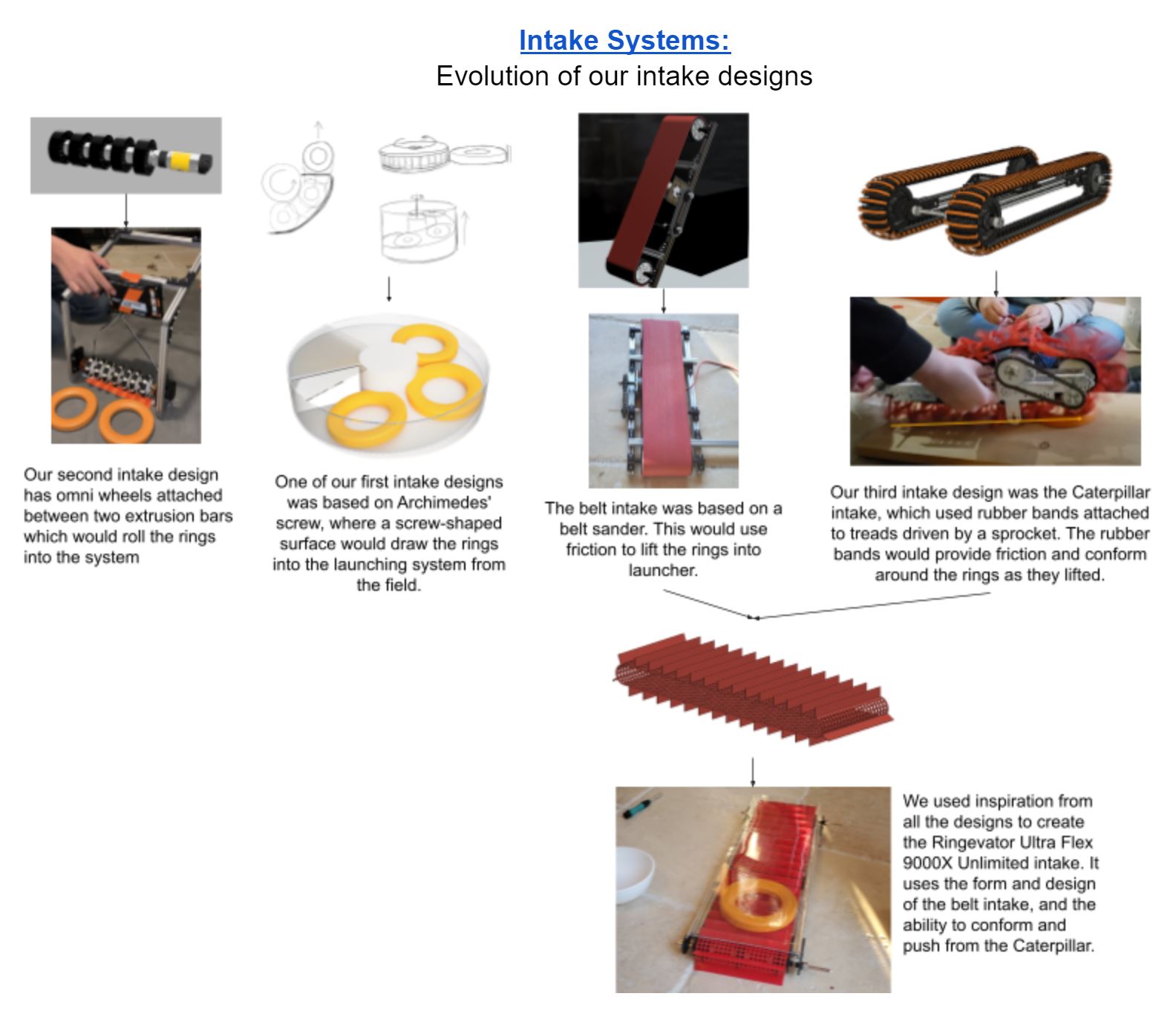
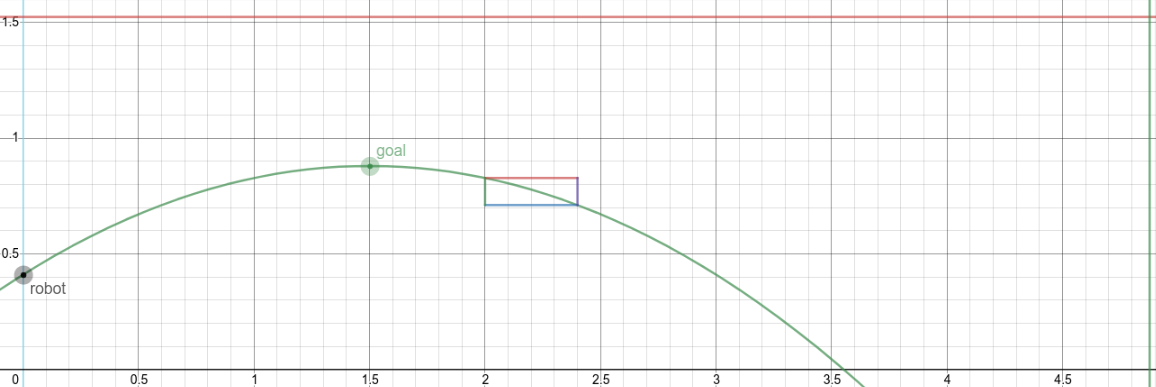

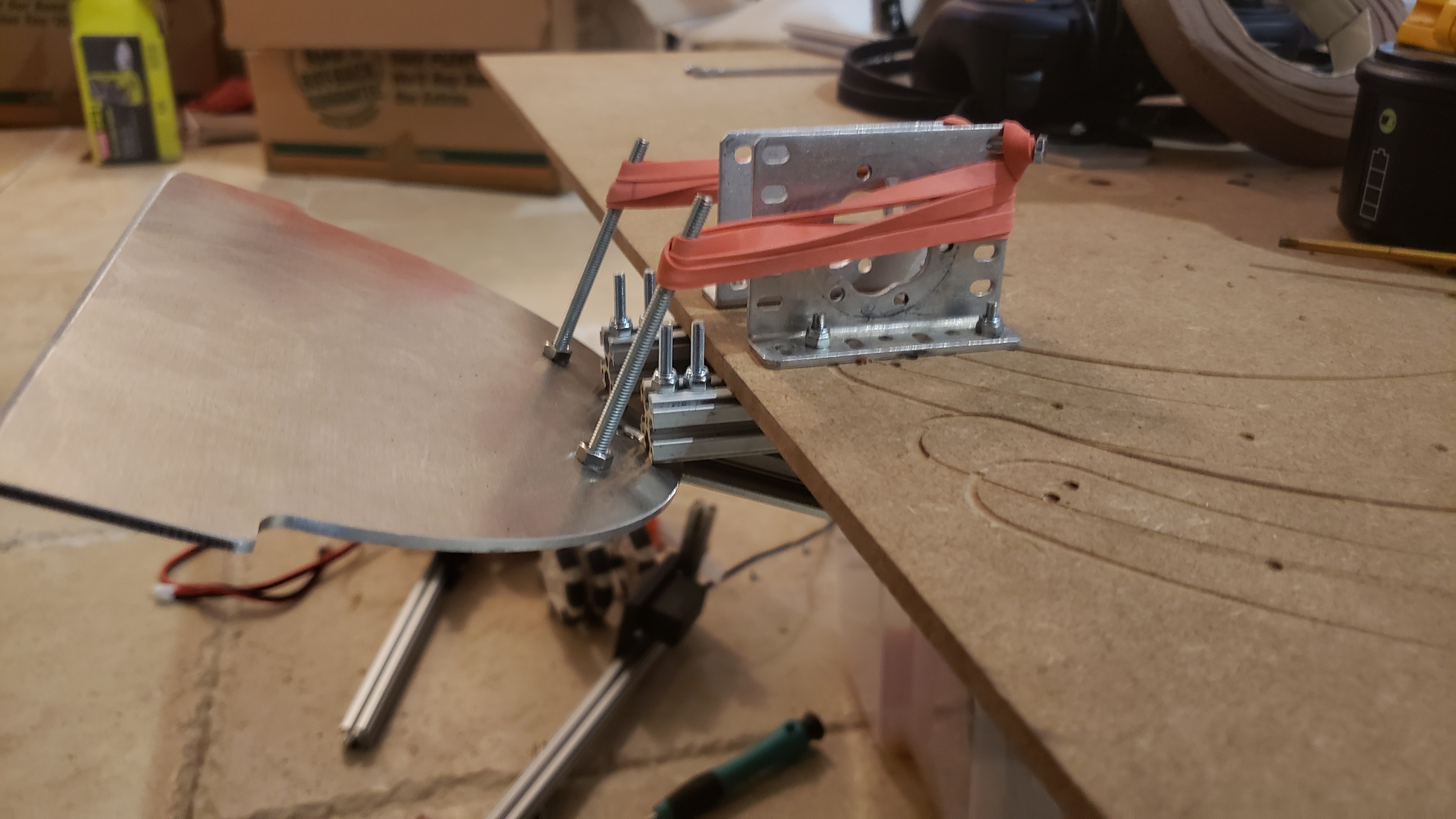
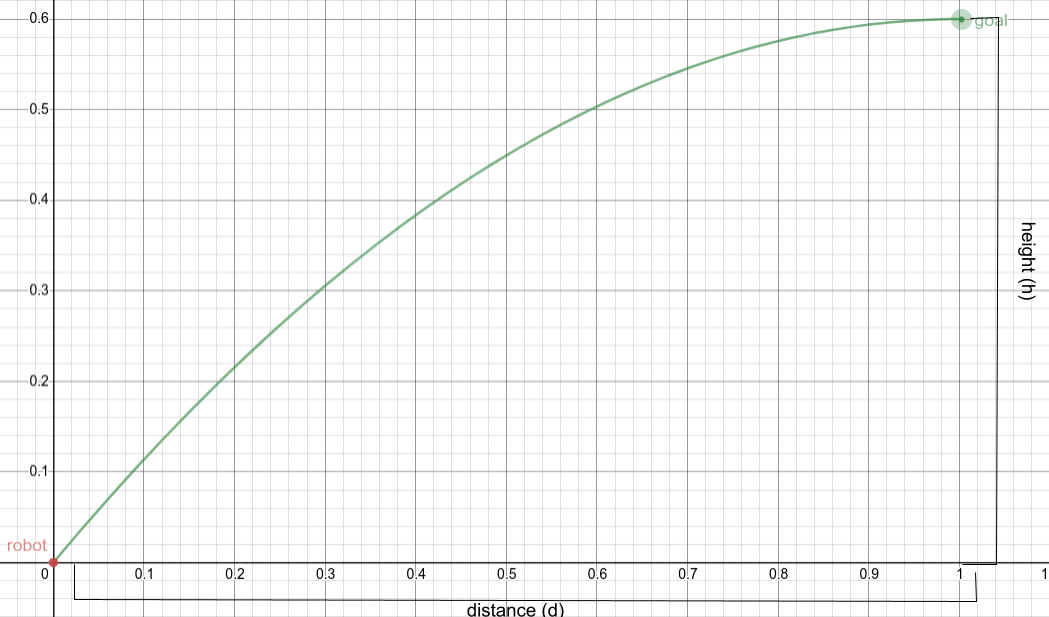
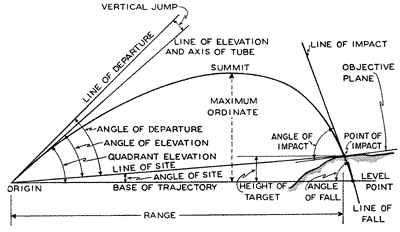

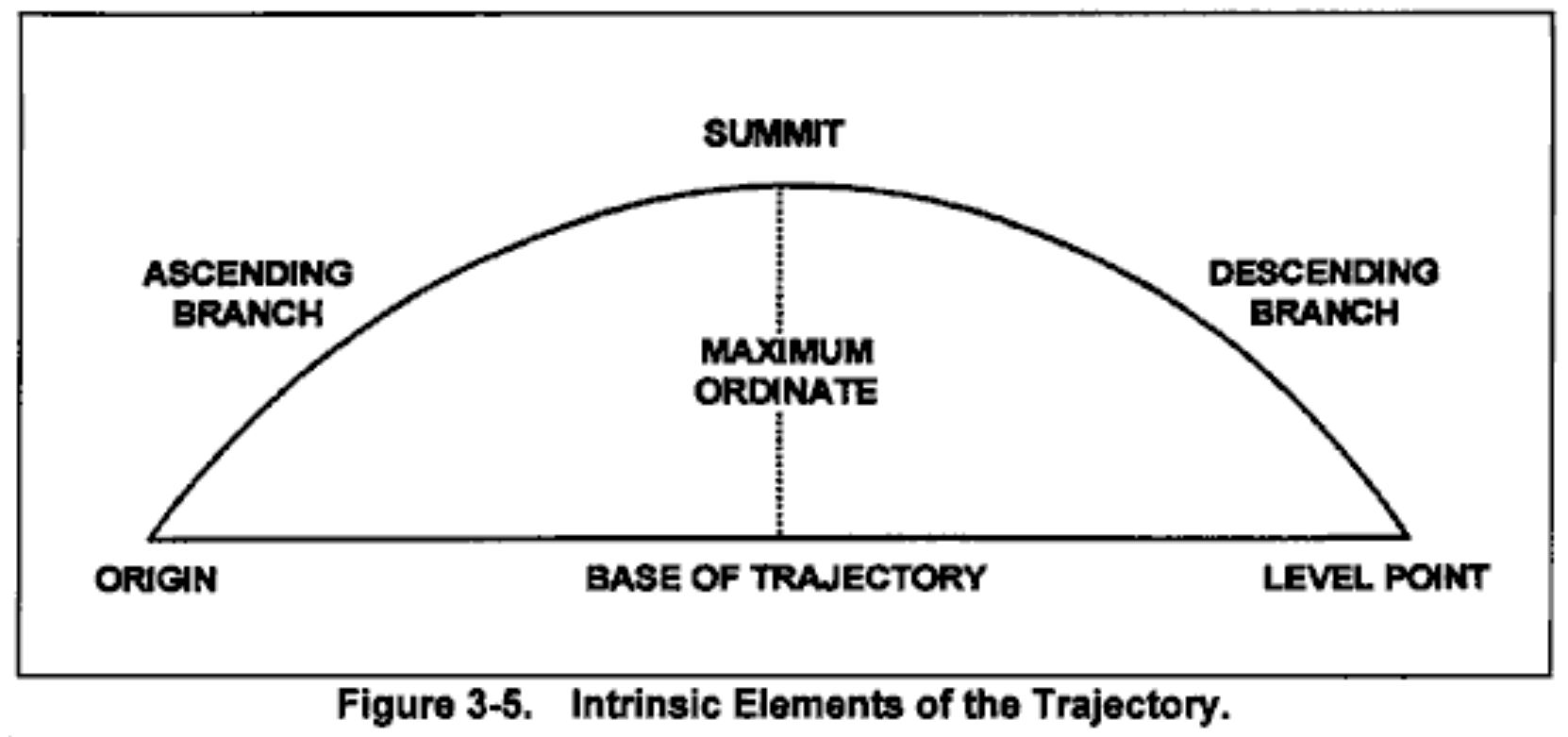
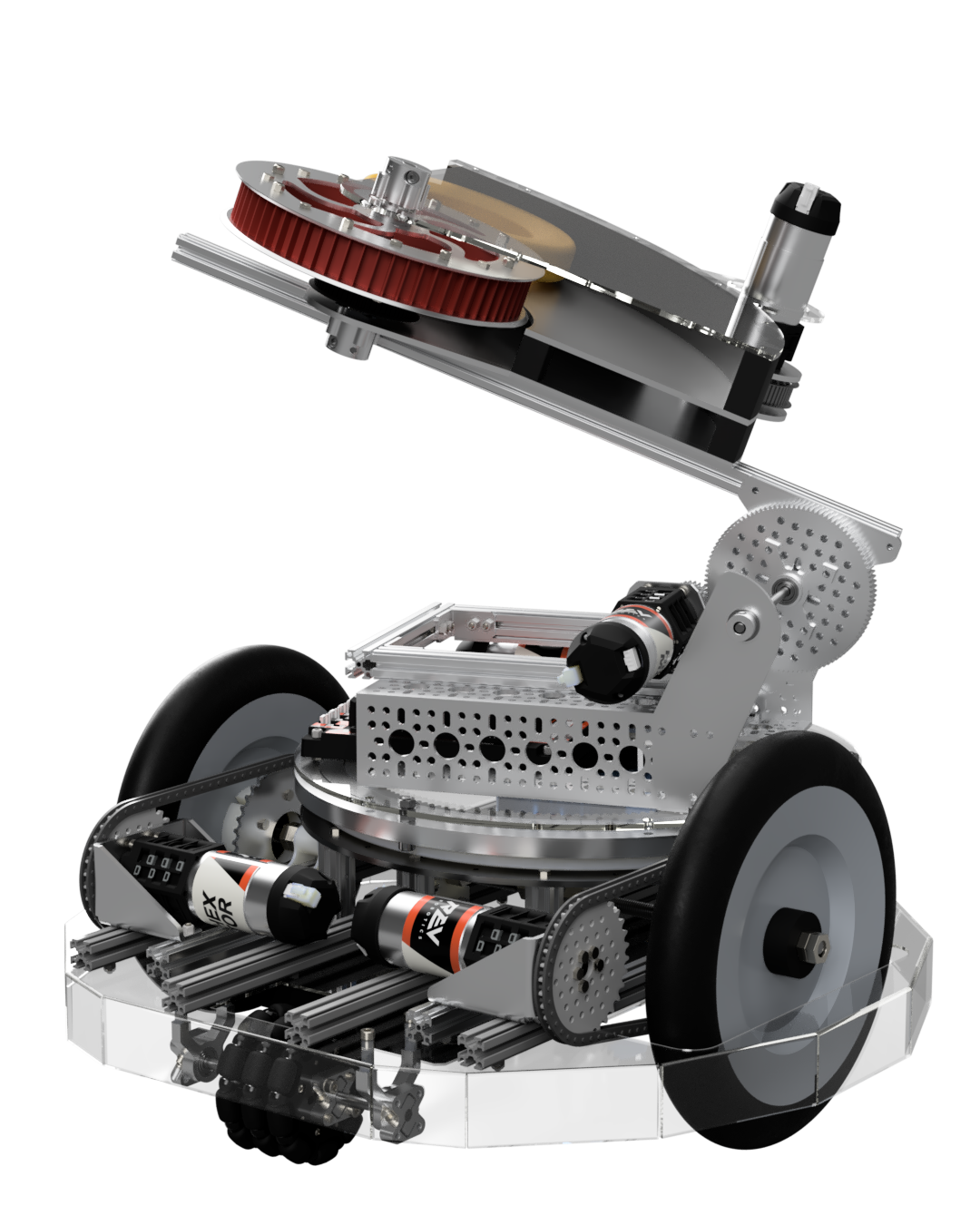
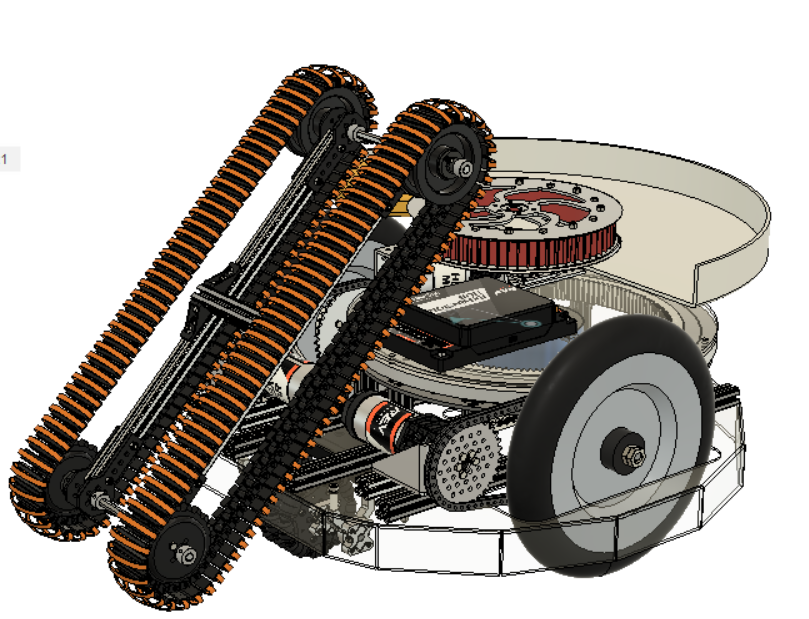
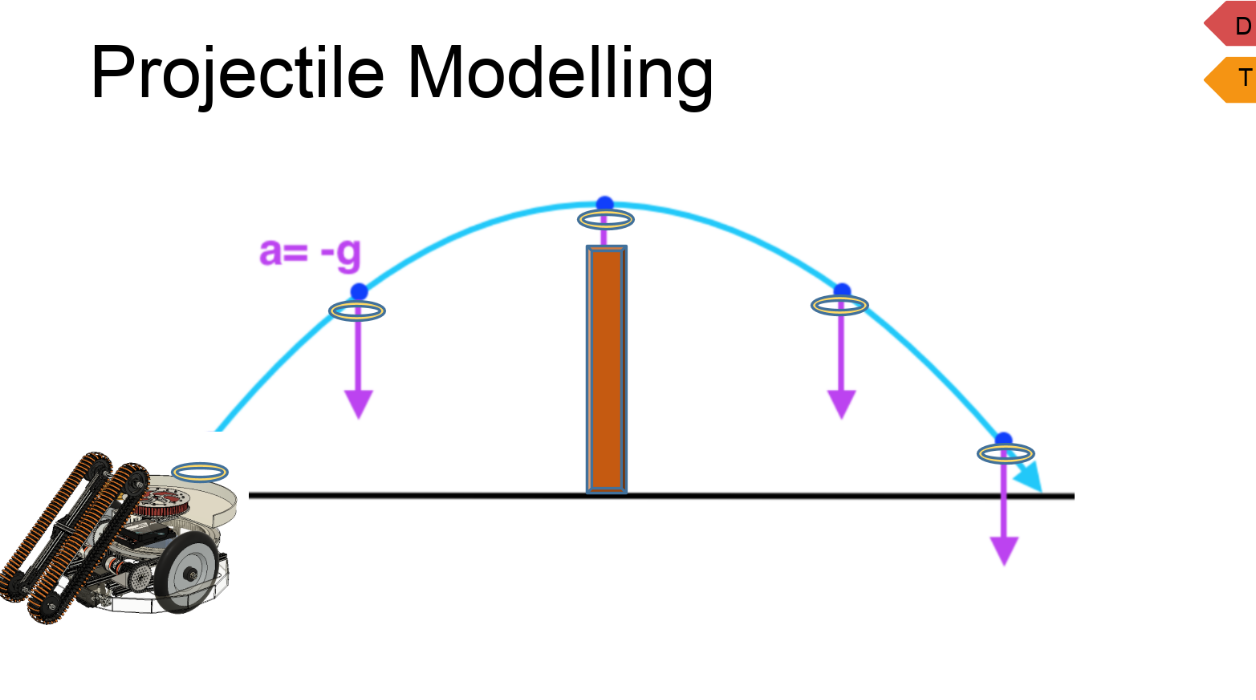




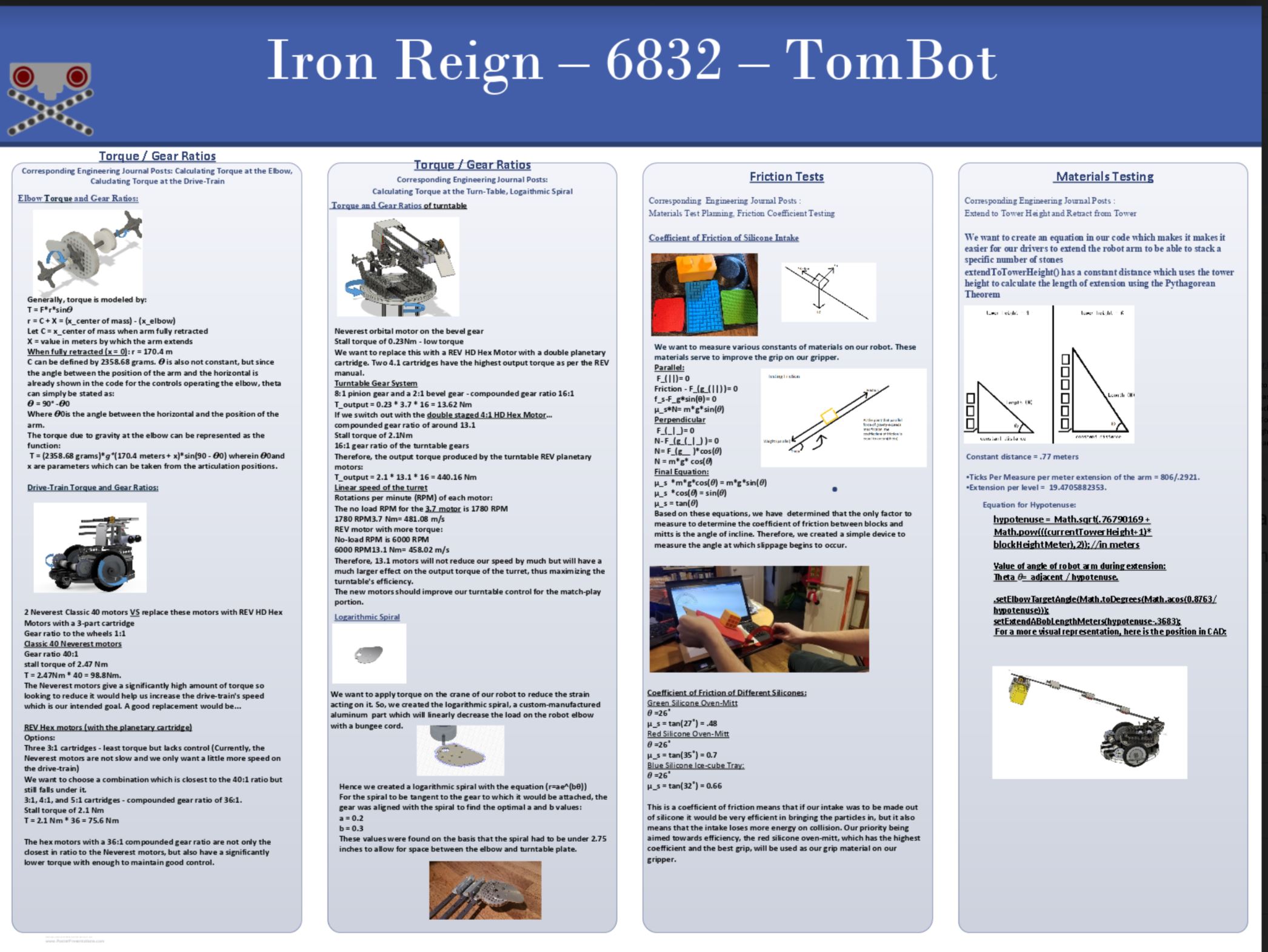

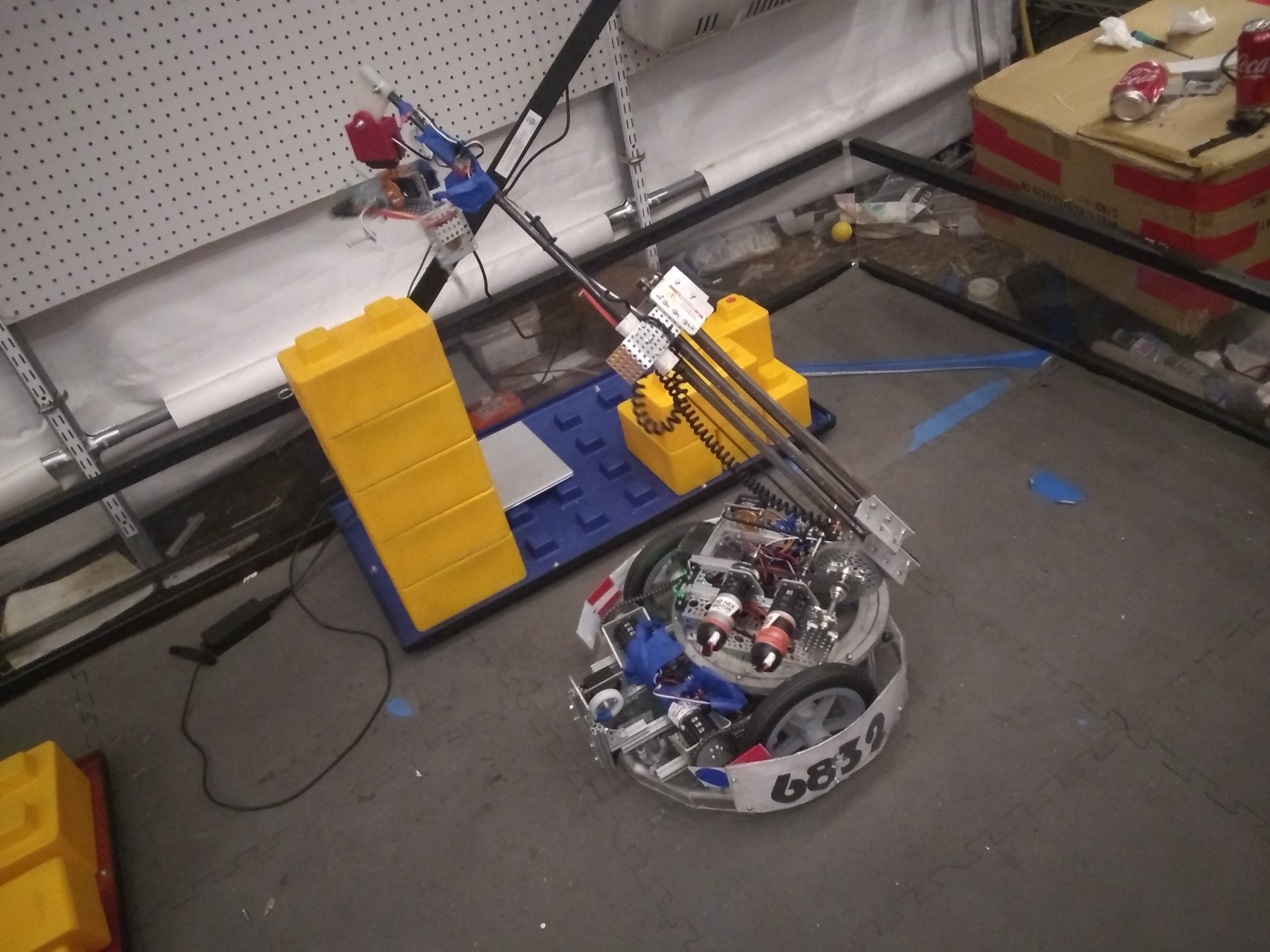

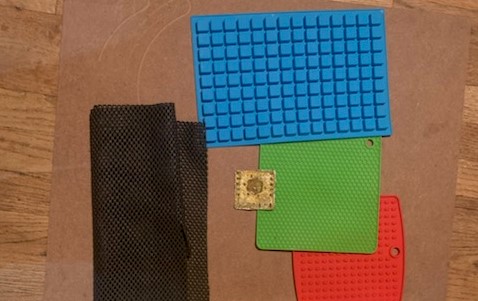
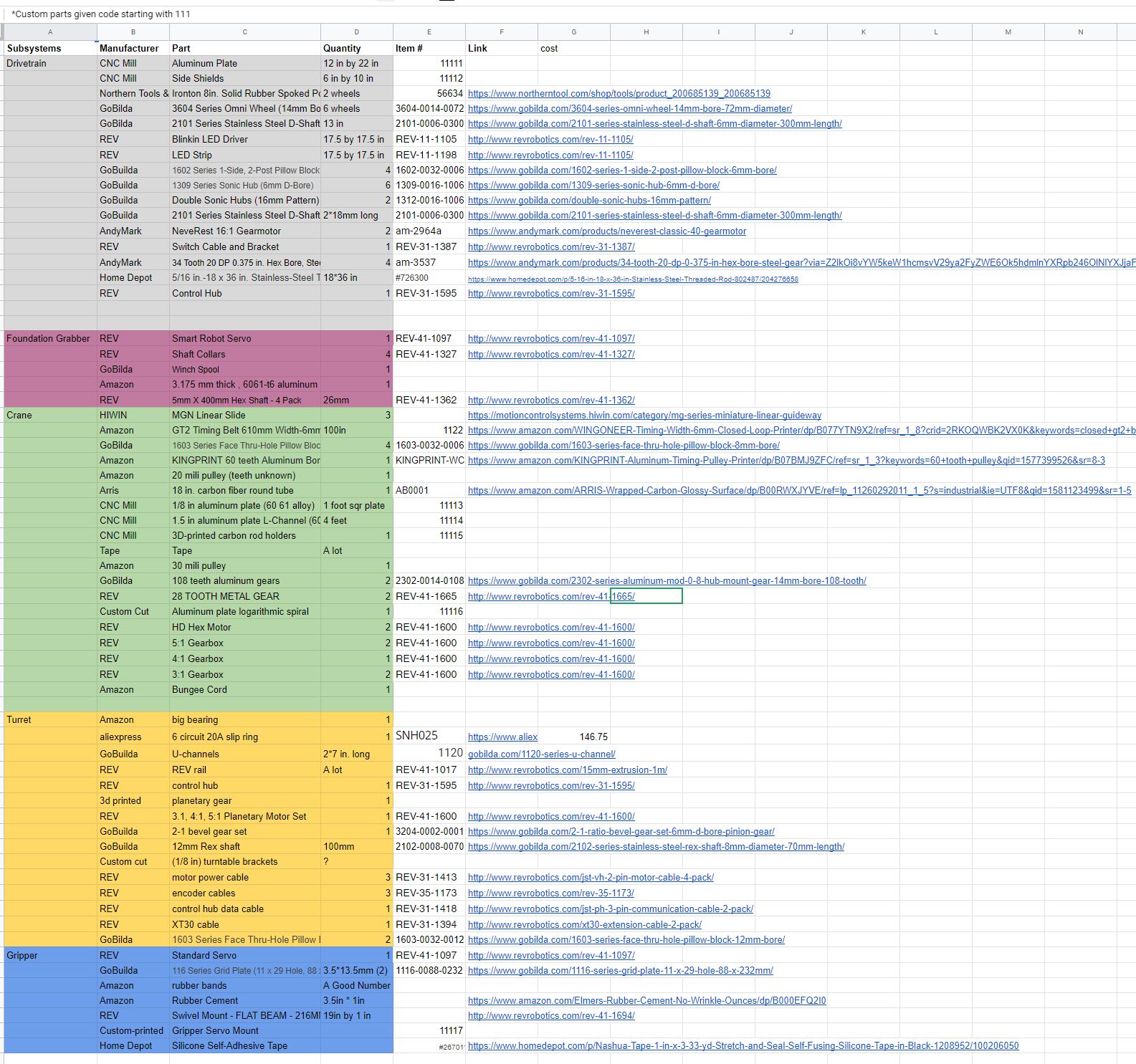


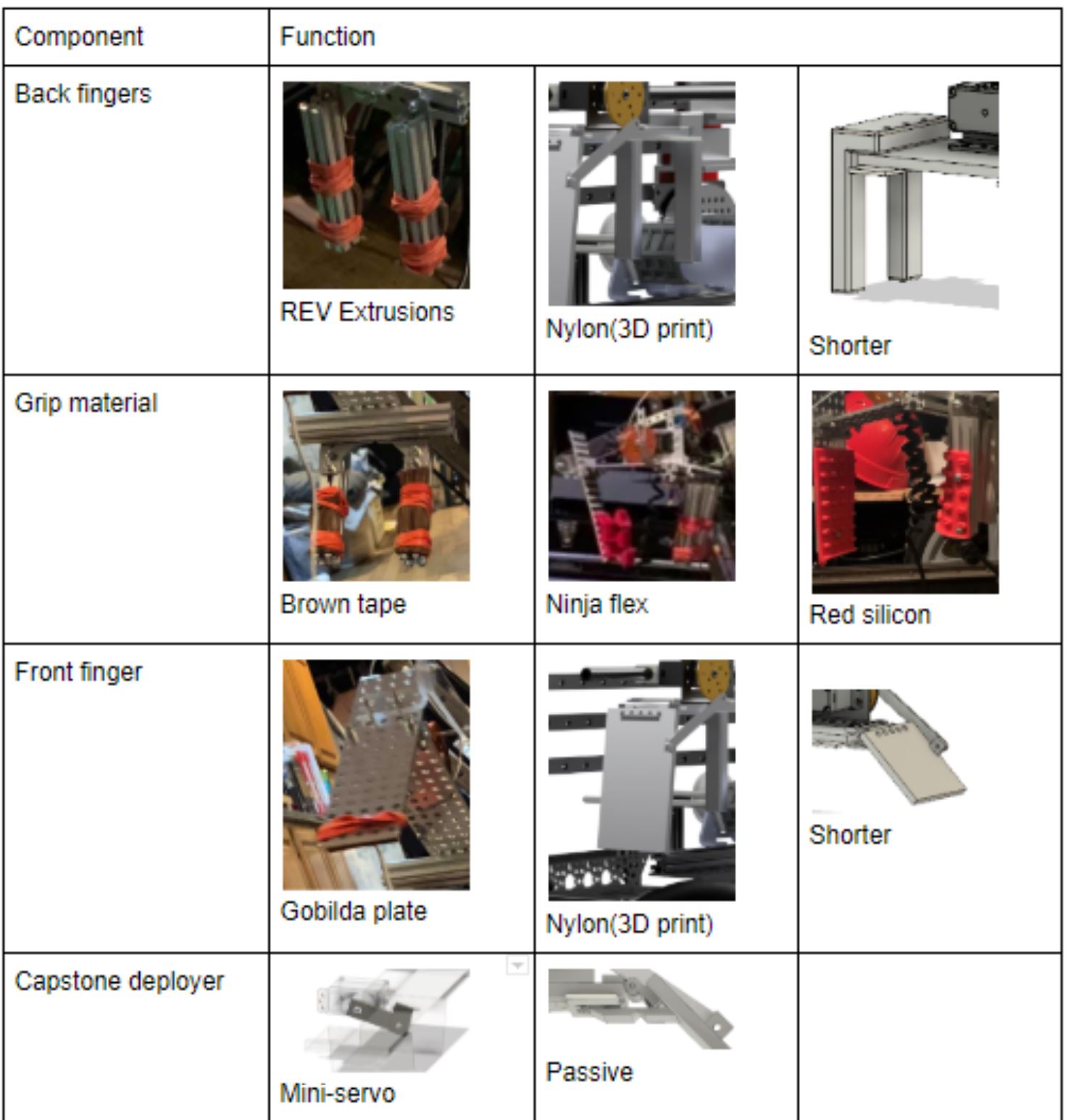

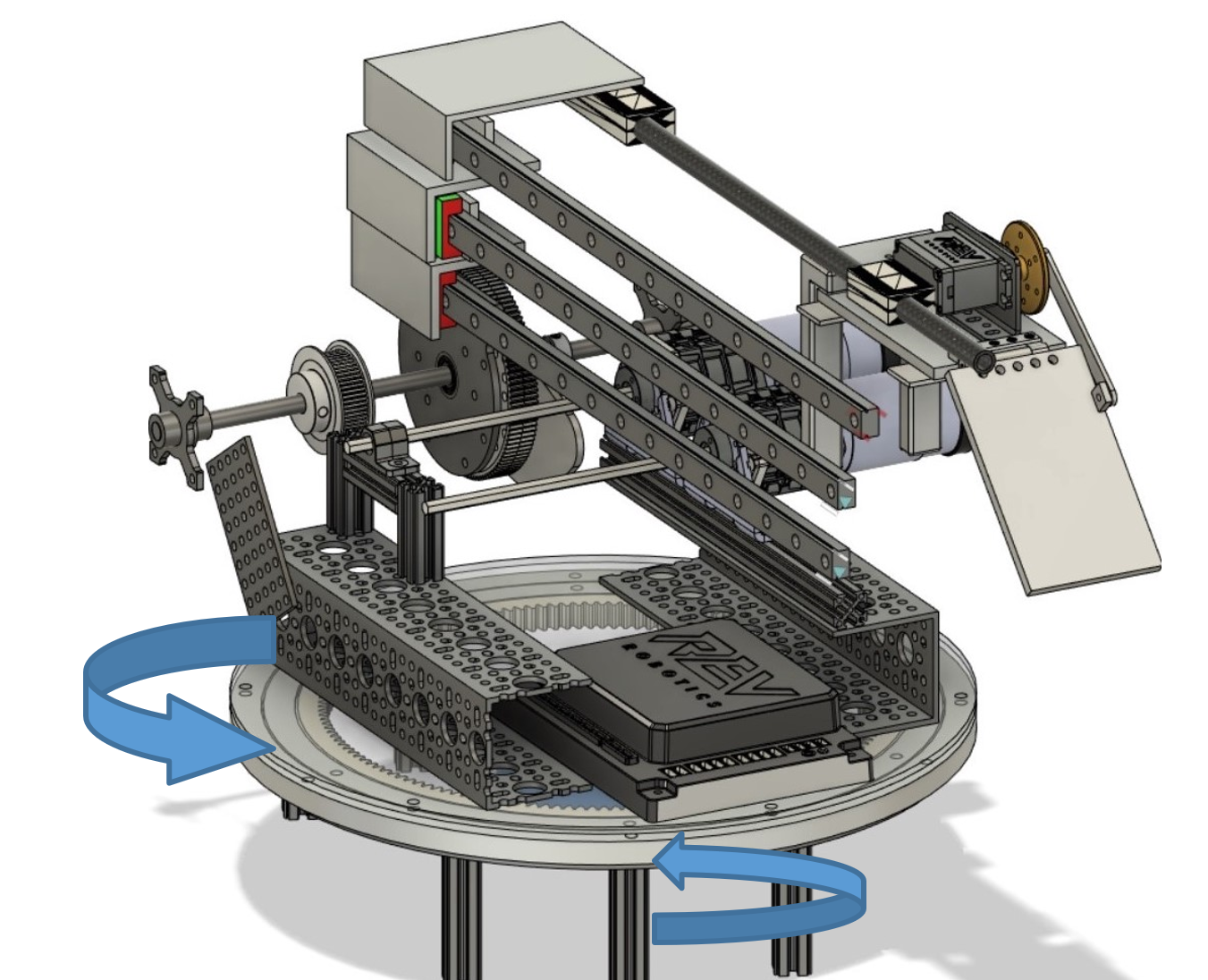
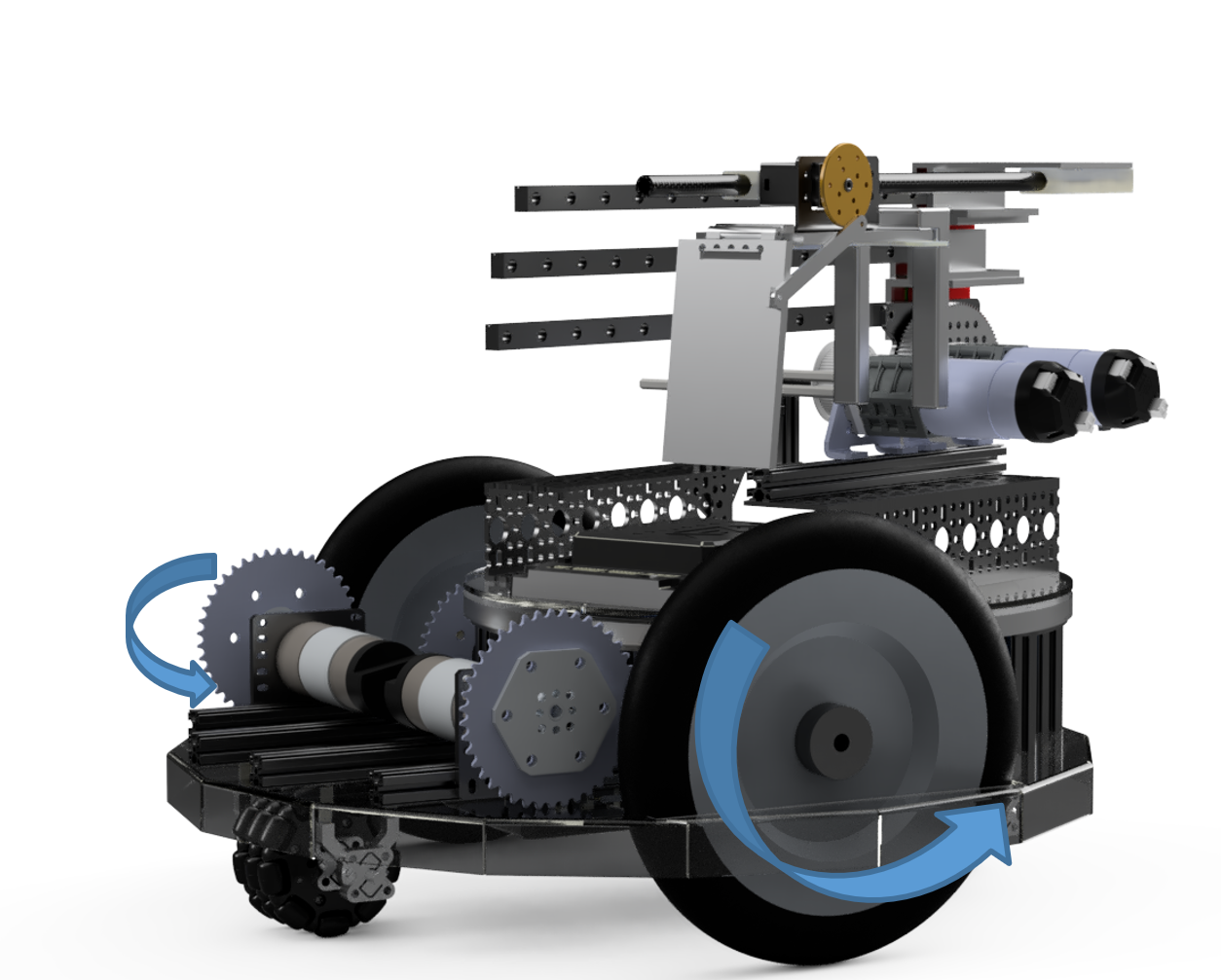
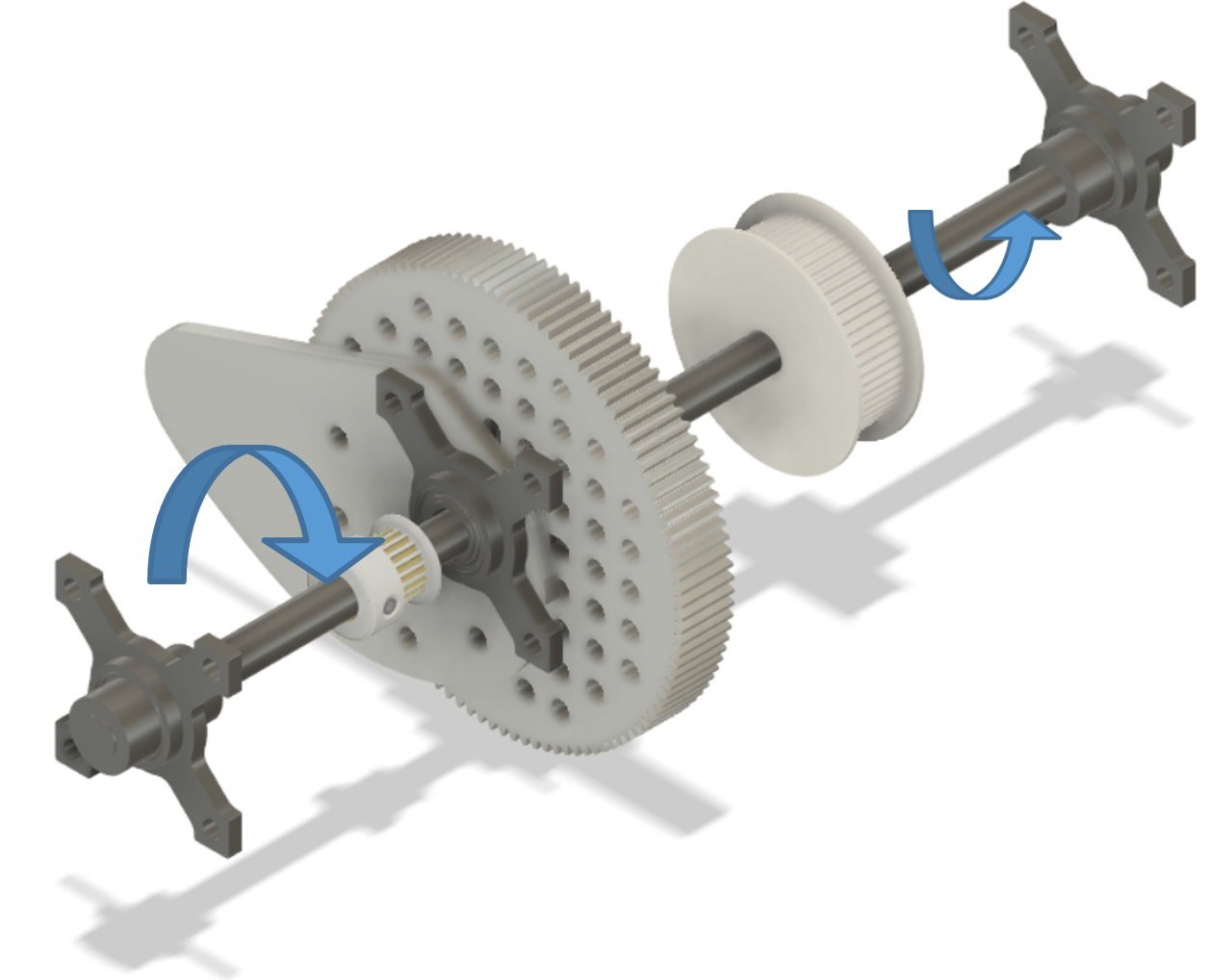
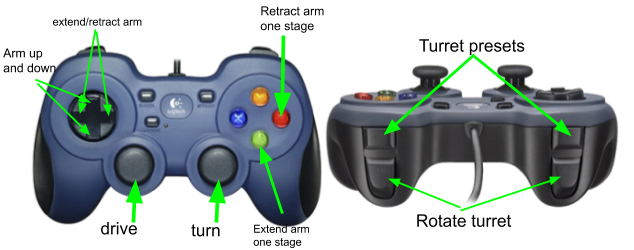






 ...
...


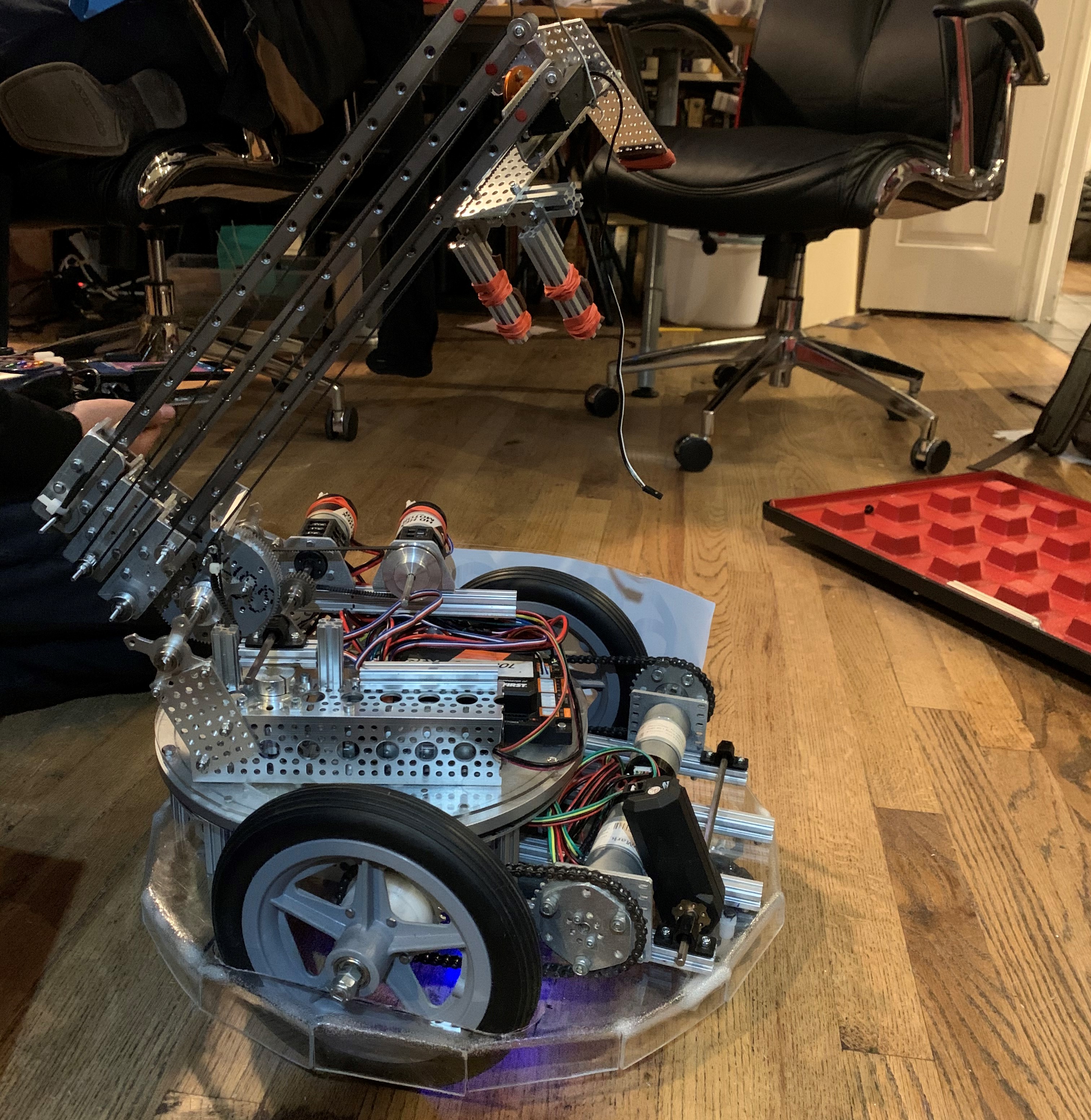


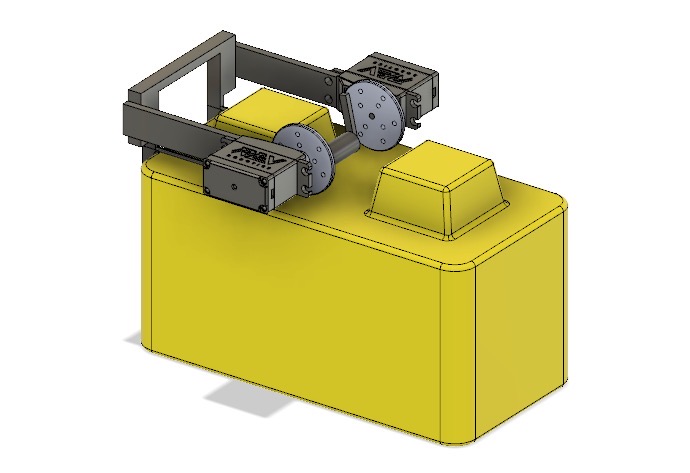
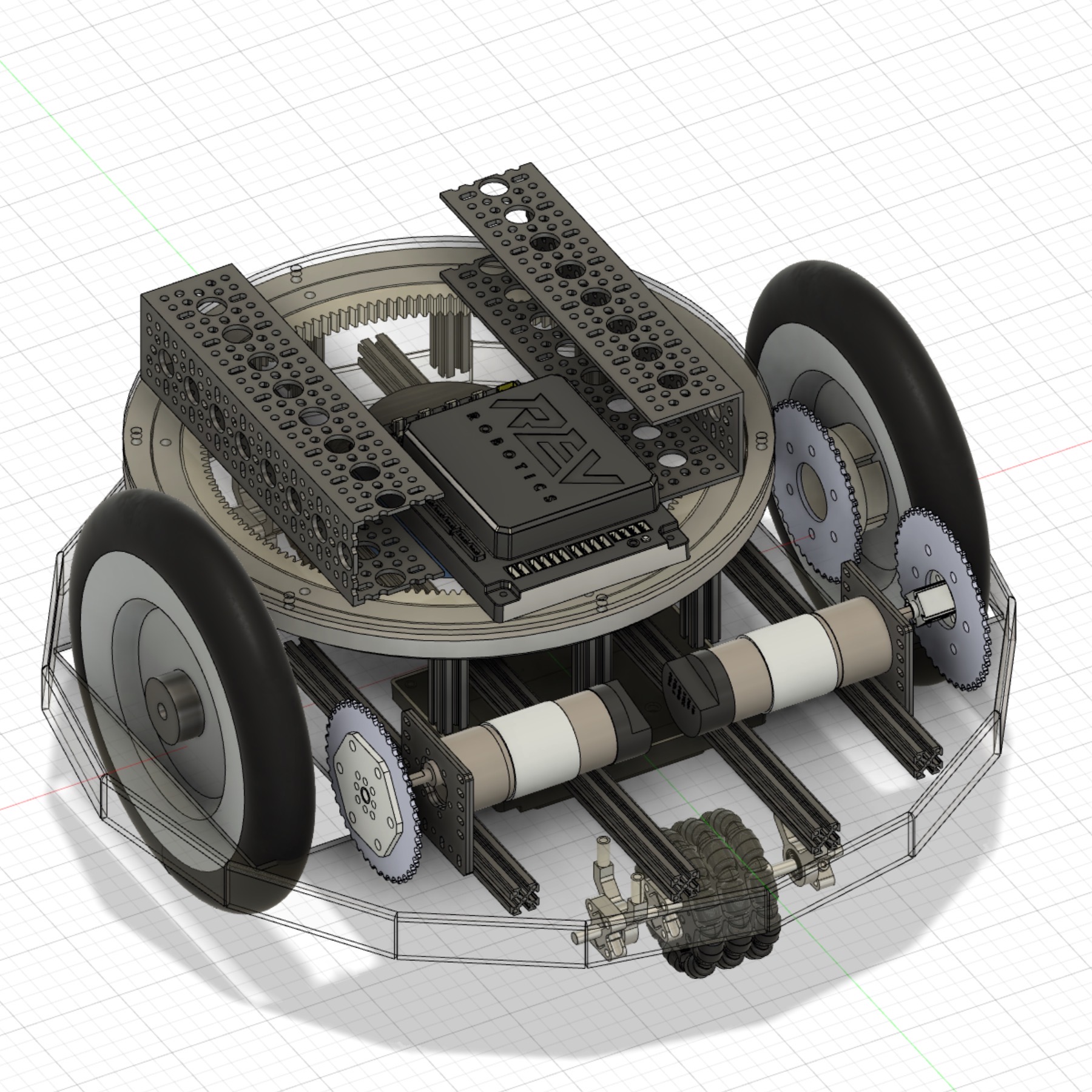
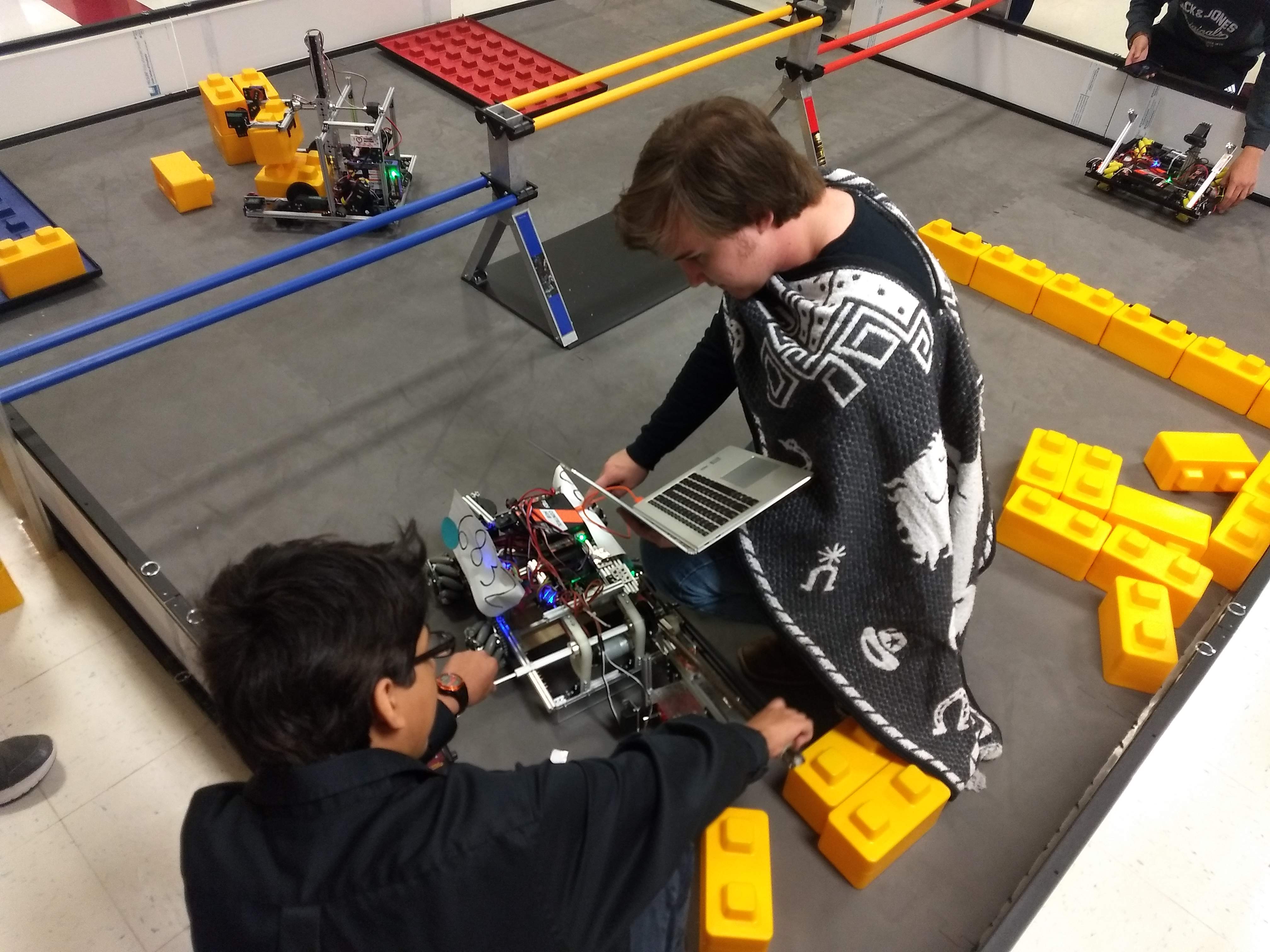

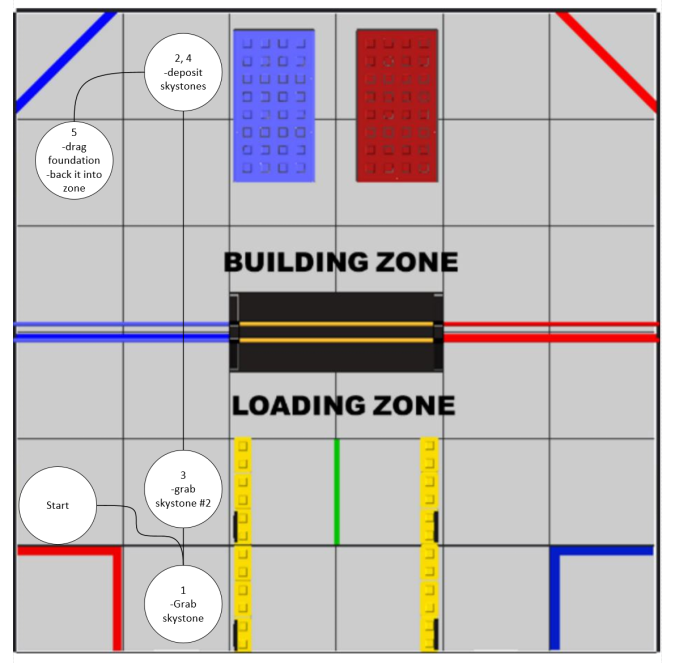
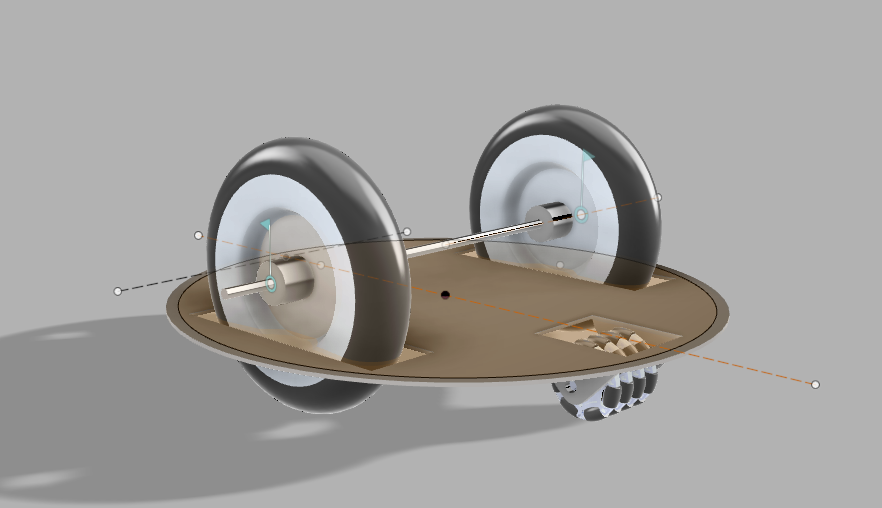

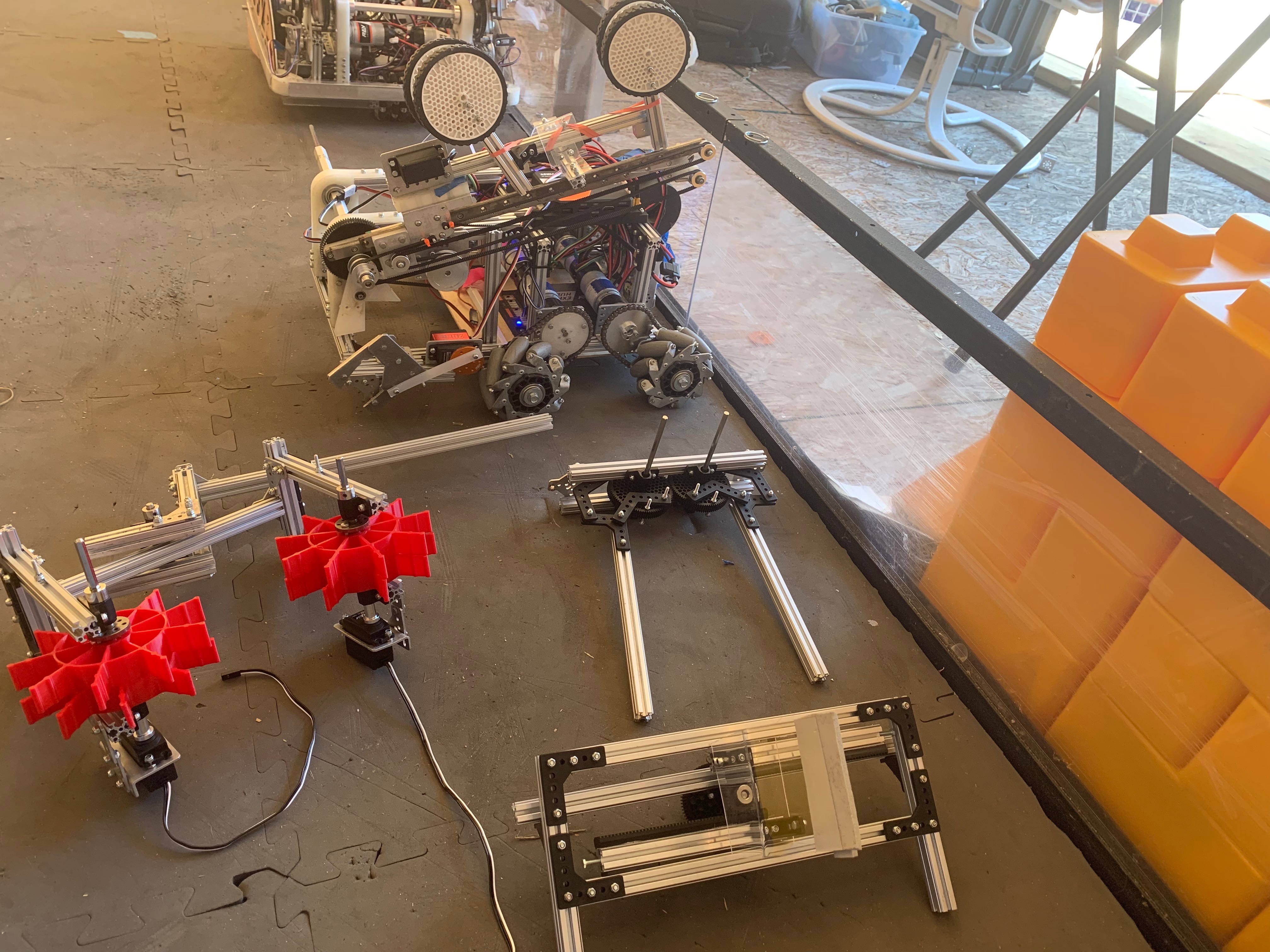

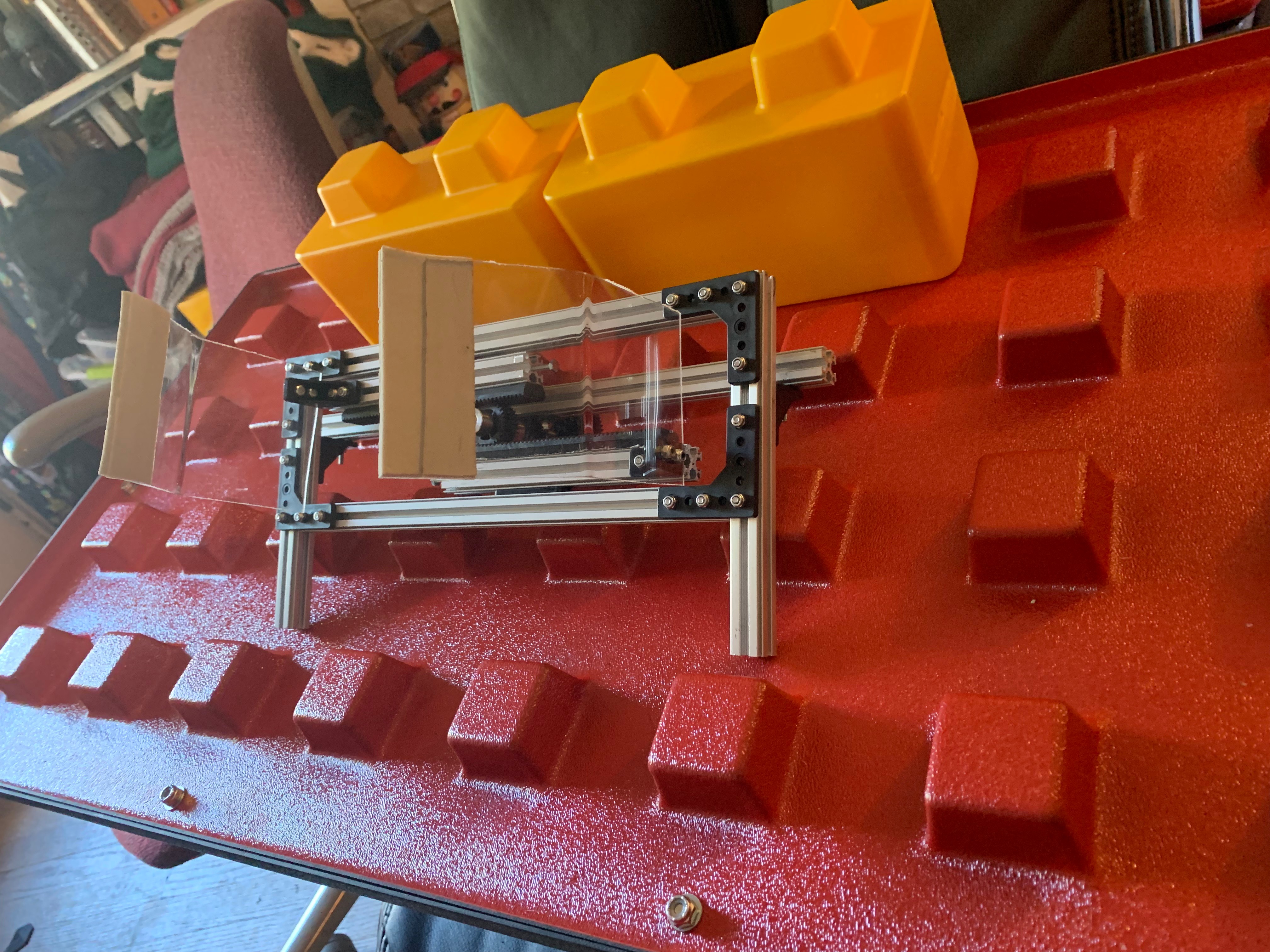
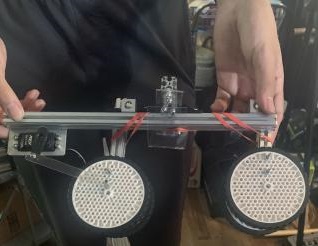

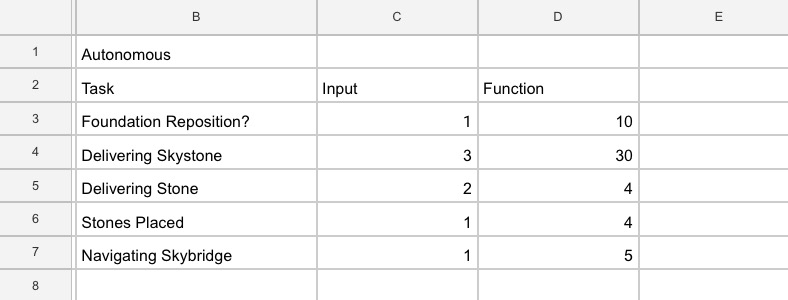
 Iron Reign was recently selected to attend a REV Control Hub trial along with select other teams in the region. We wanted to do this so that we could get a good look at the control system that FTC would likely be switching to in the near future, as well as get another chance to test our robot...
Iron Reign was recently selected to attend a REV Control Hub trial along with select other teams in the region. We wanted to do this so that we could get a good look at the control system that FTC would likely be switching to in the near future, as well as get another chance to test our robot...

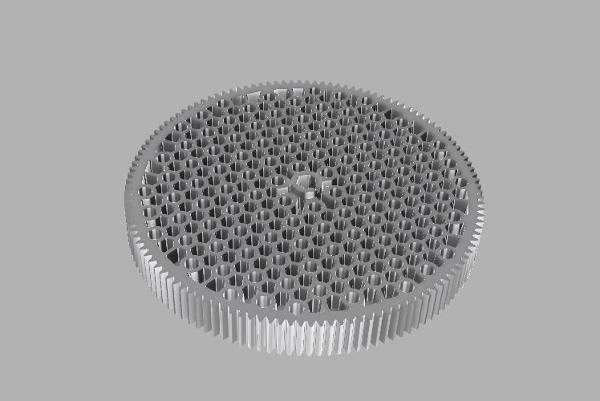
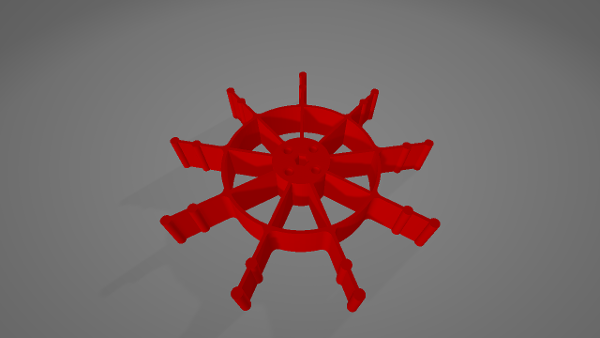



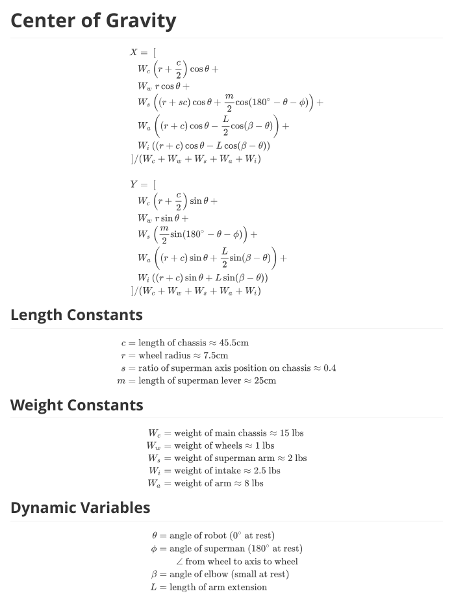


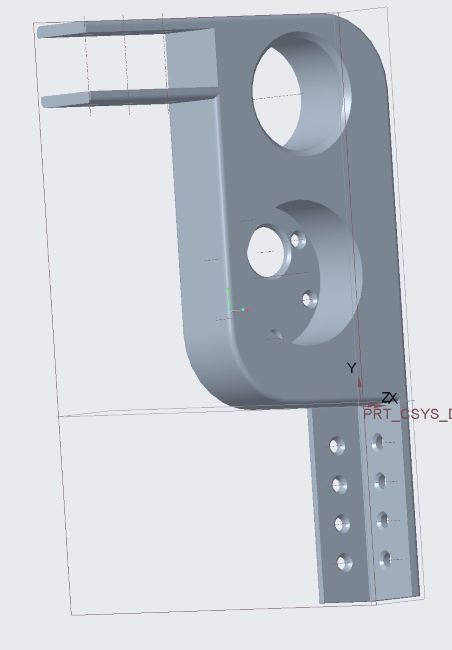
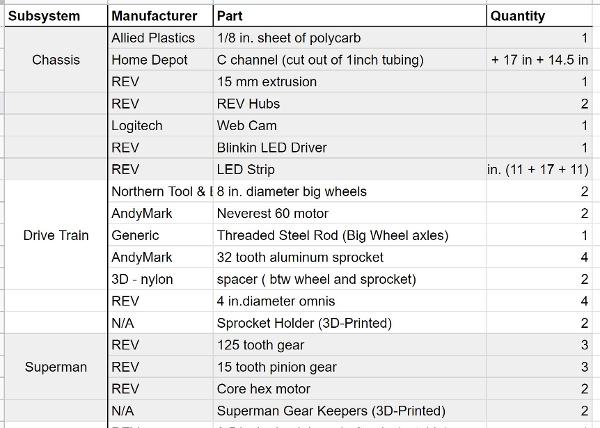


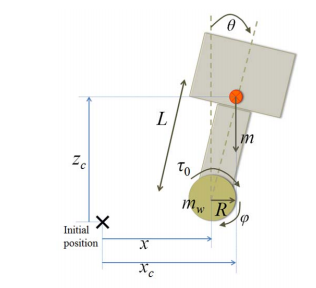

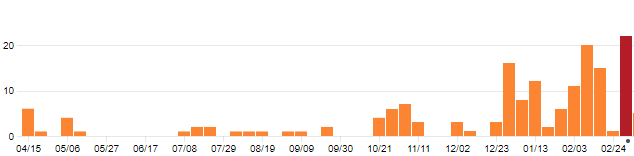

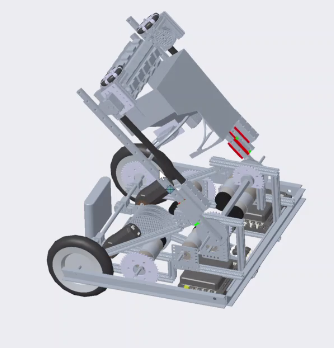
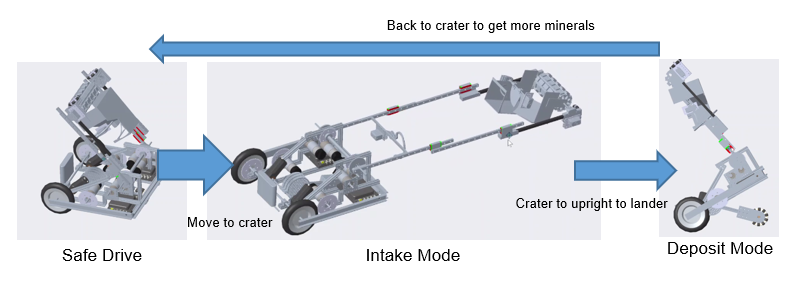

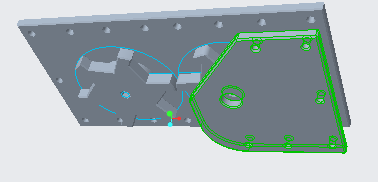

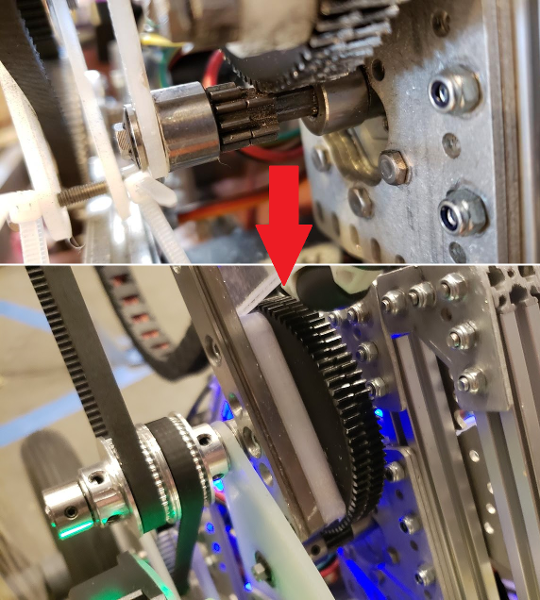

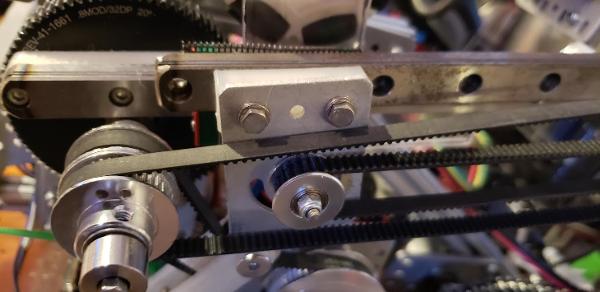
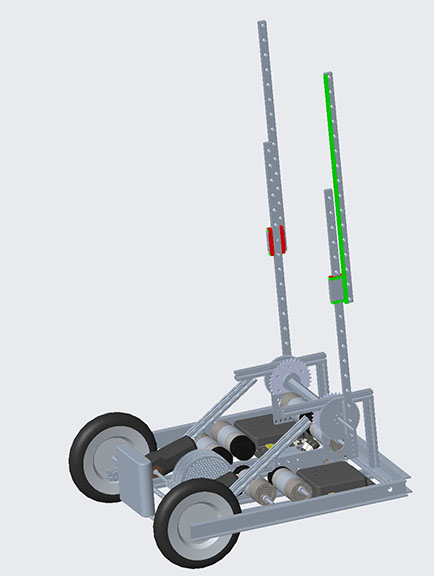







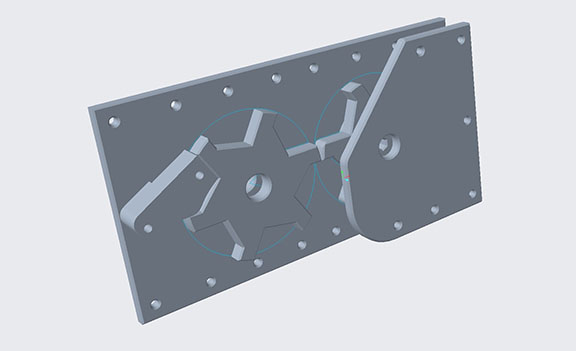

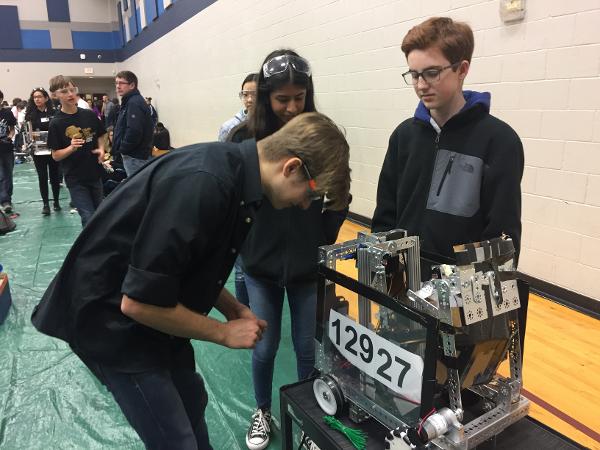

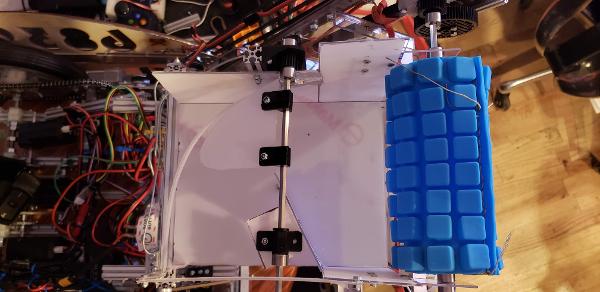
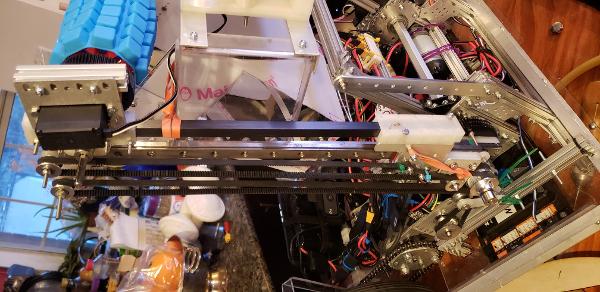

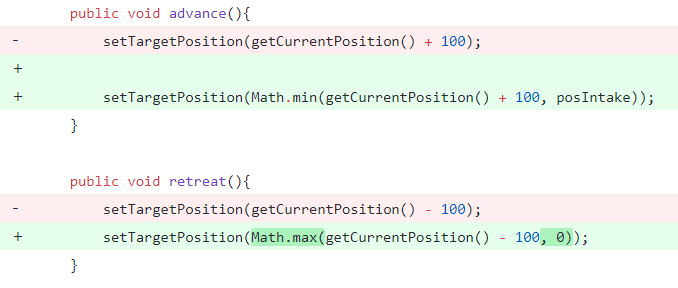

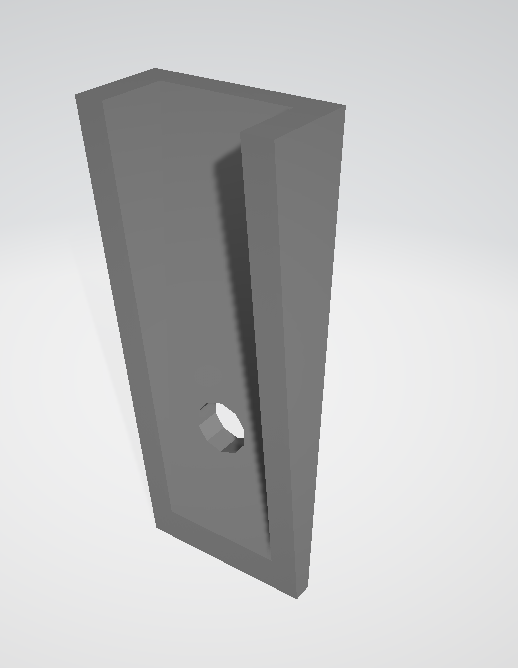

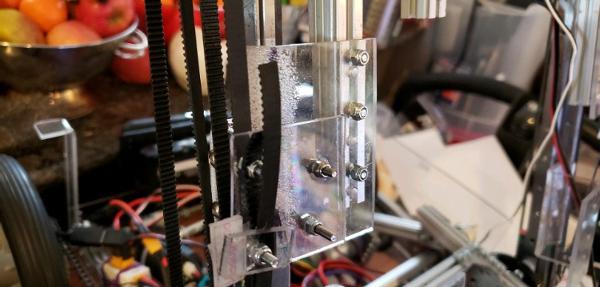




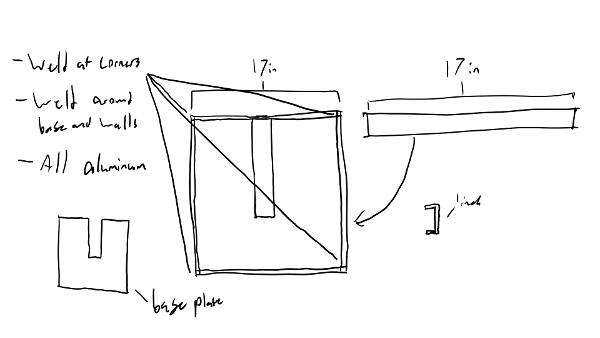
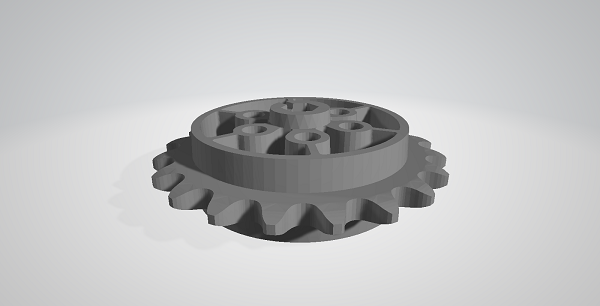

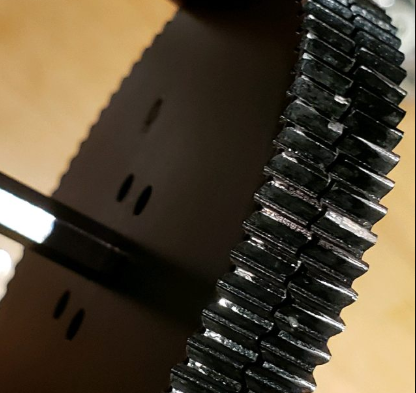
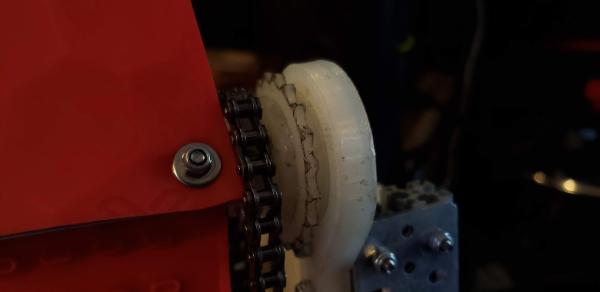
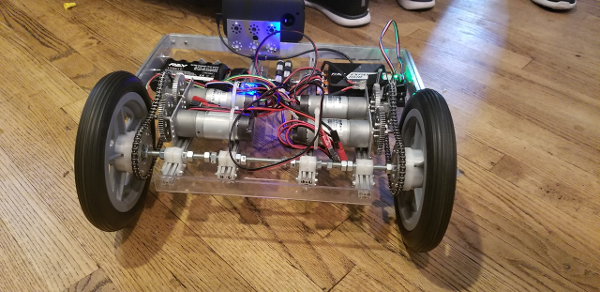


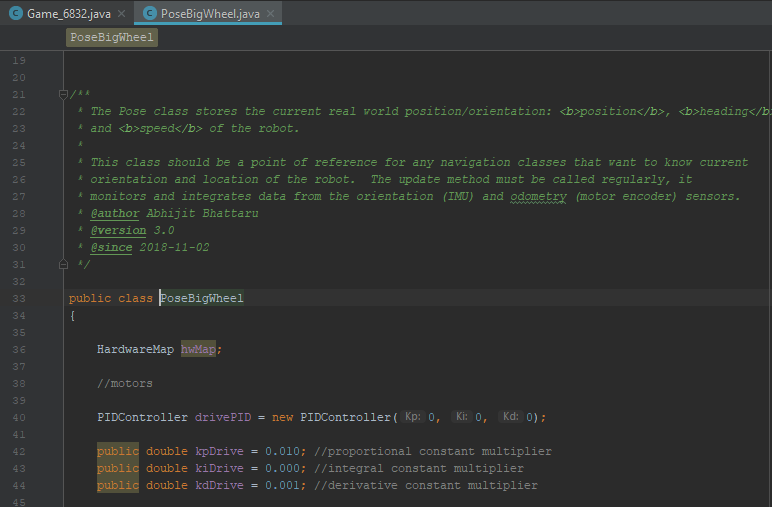









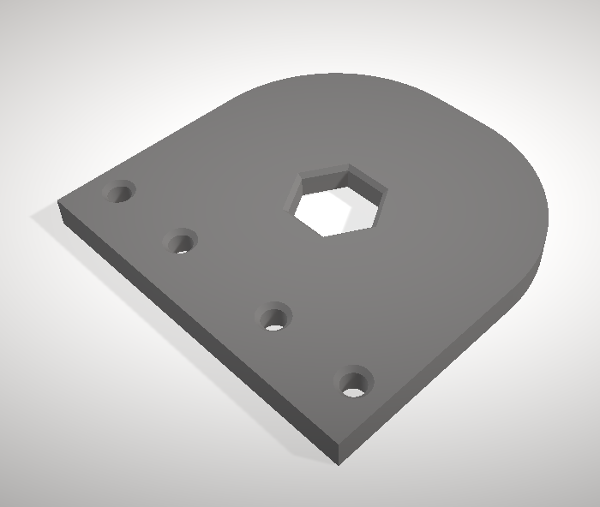
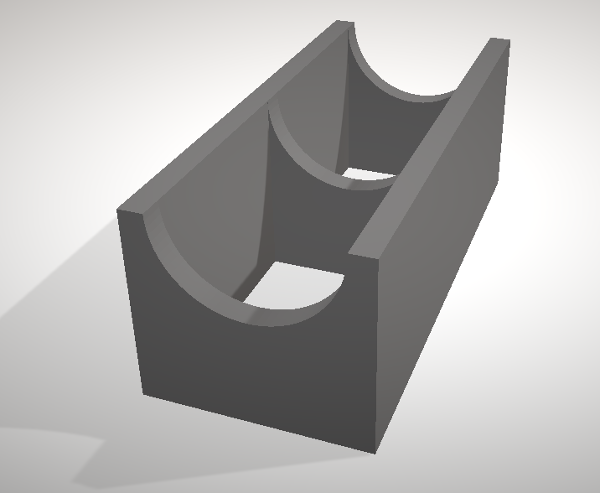


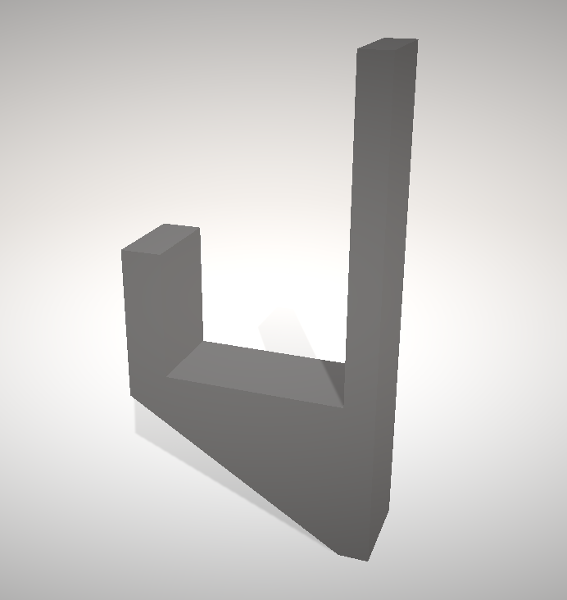
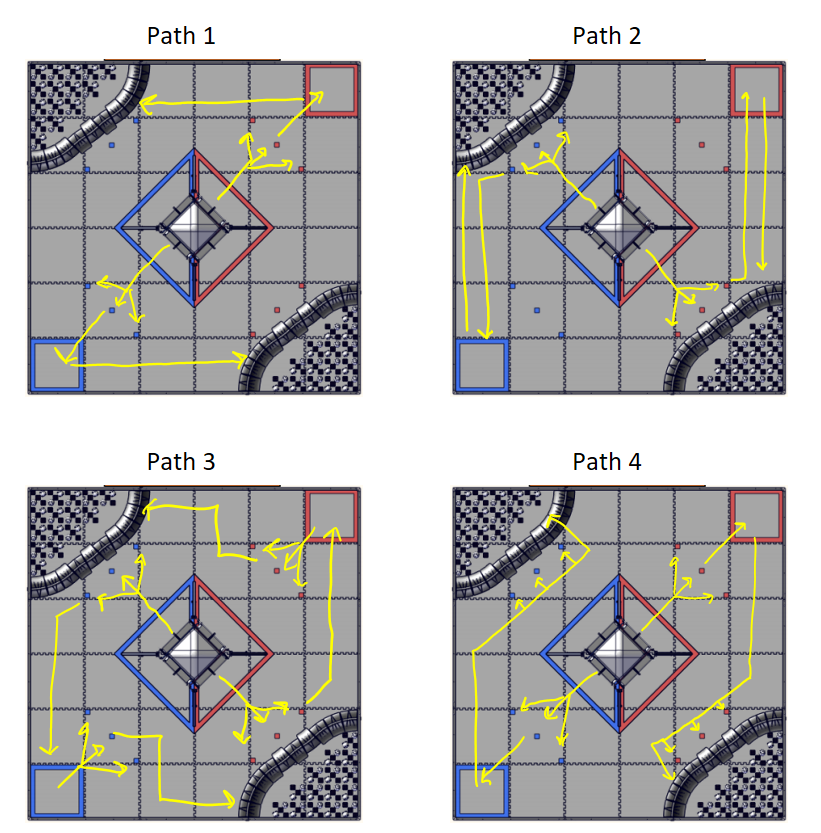




 This suggestion uses a...
This suggestion uses a...








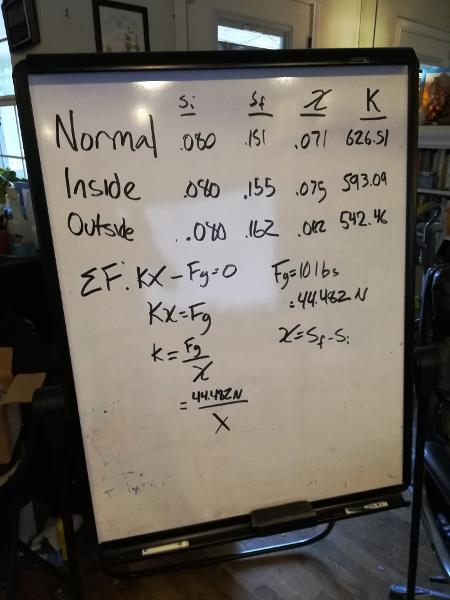
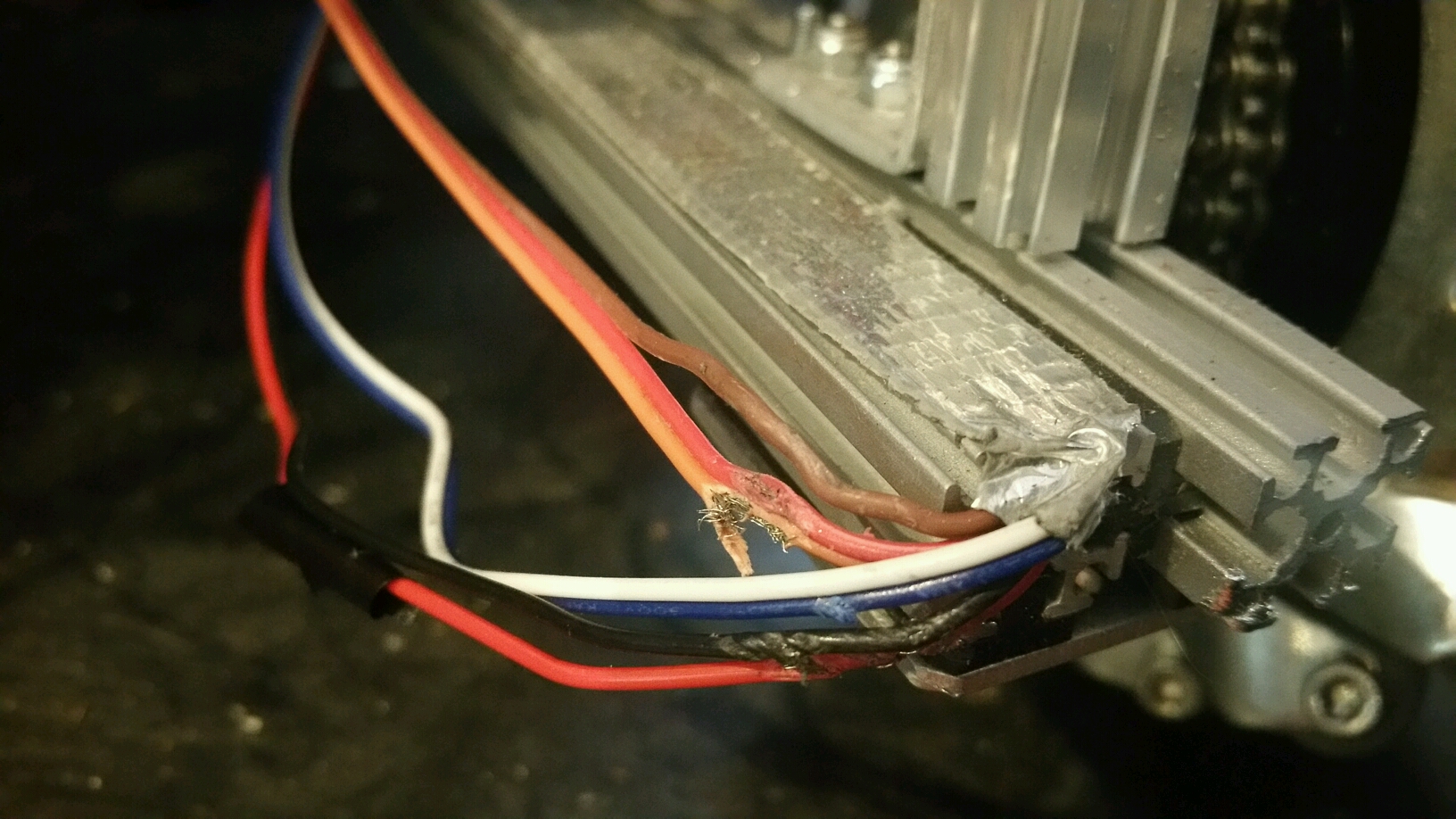


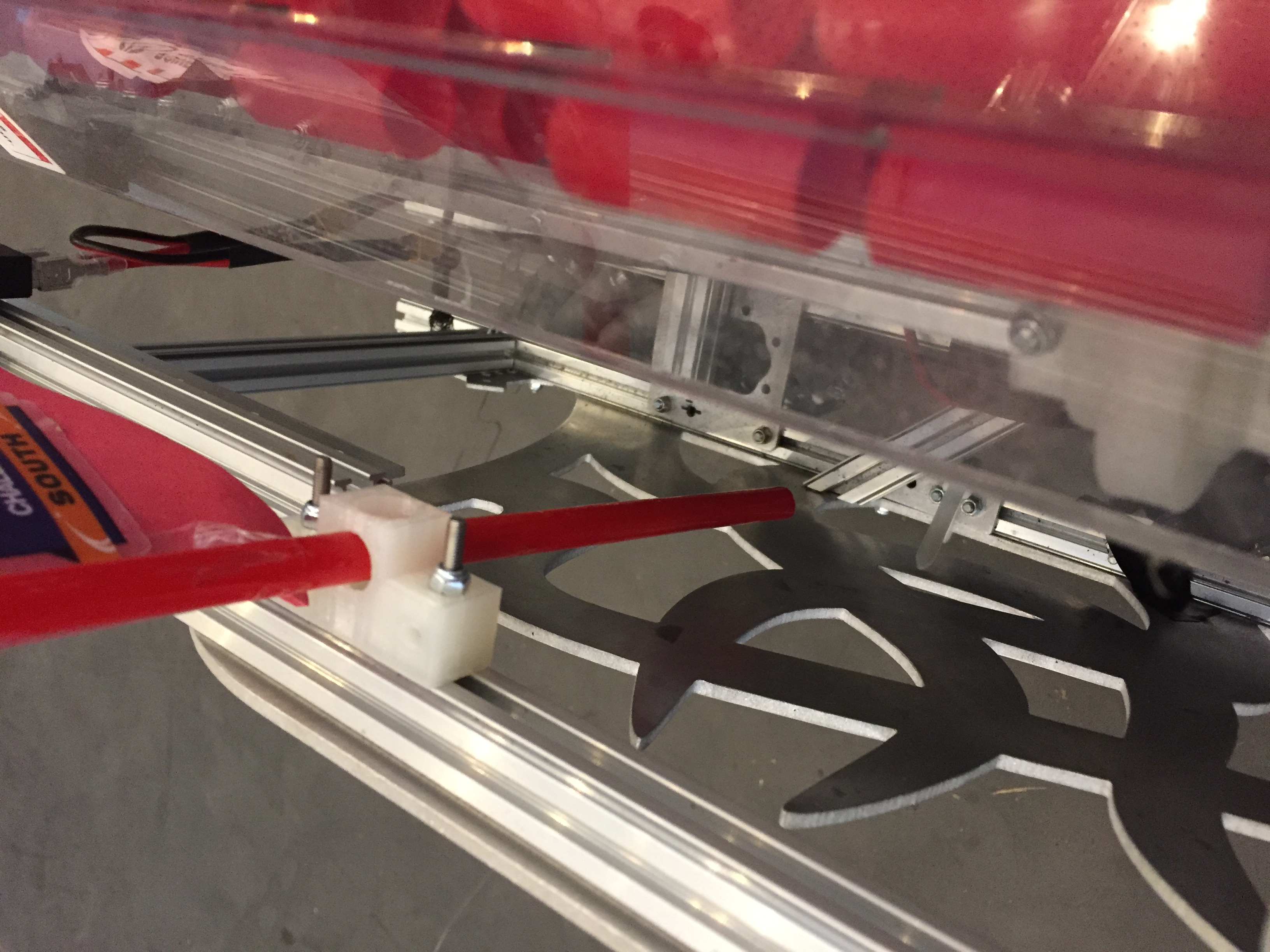
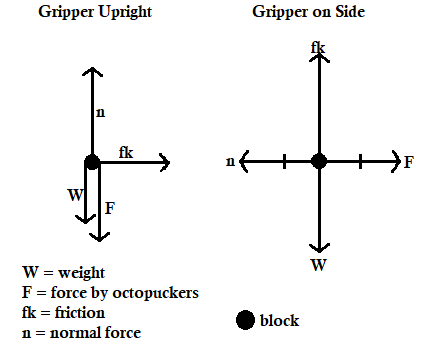




 This design was too rigid, we overlooked the fact that triangles tend to be the strongest shape, and therefore this octopucker wasn't as compliant as we wanted, damaging the blocks.
This design was too rigid, we overlooked the fact that triangles tend to be the strongest shape, and therefore this octopucker wasn't as compliant as we wanted, damaging the blocks.  This design was really good, and we used it for 3-4 tournaments. Our initial design of these wouldn't damage the blocks significantly at the levels...
This design was really good, and we used it for 3-4 tournaments. Our initial design of these wouldn't damage the blocks significantly at the levels...

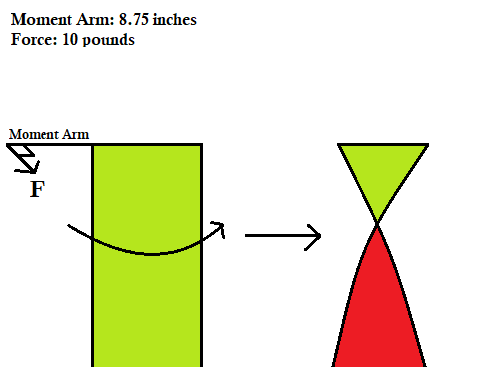

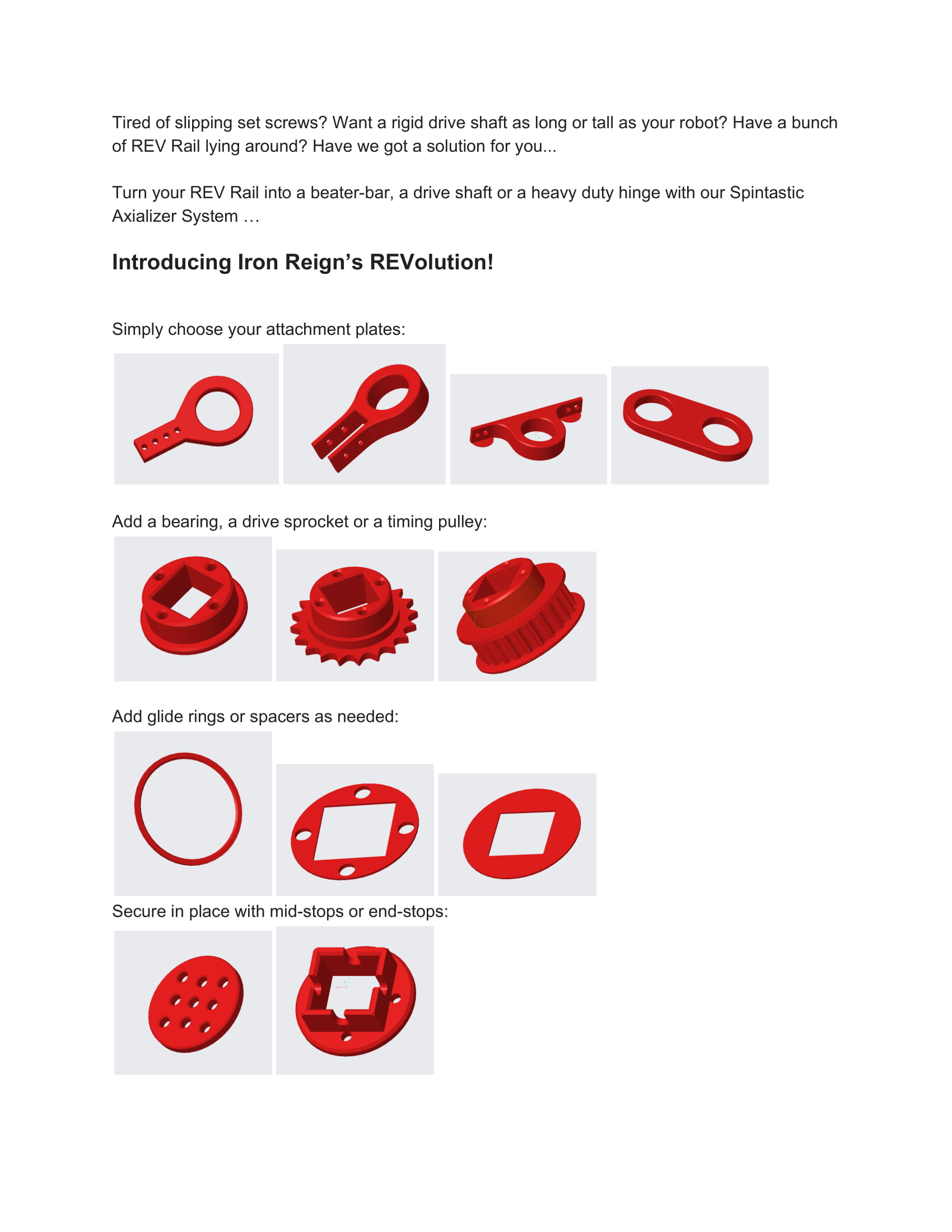
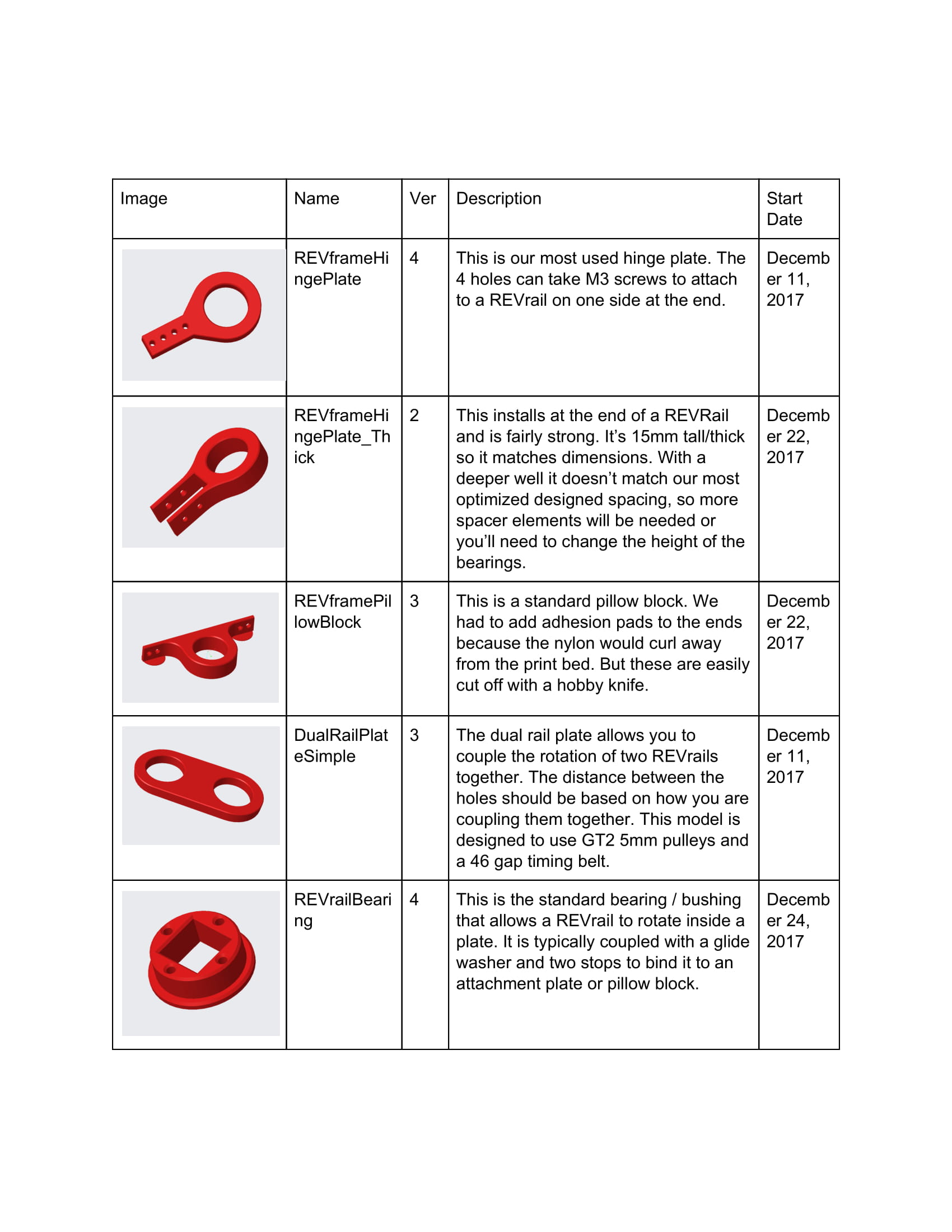 ...
...




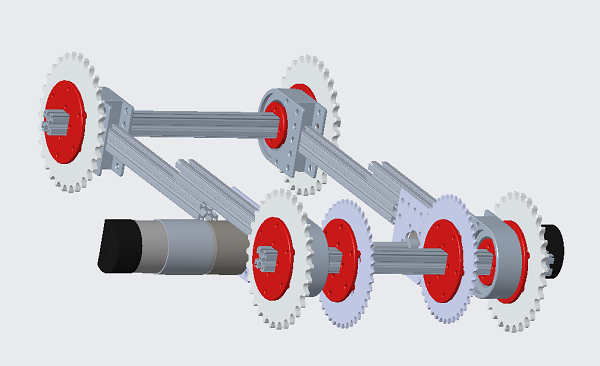
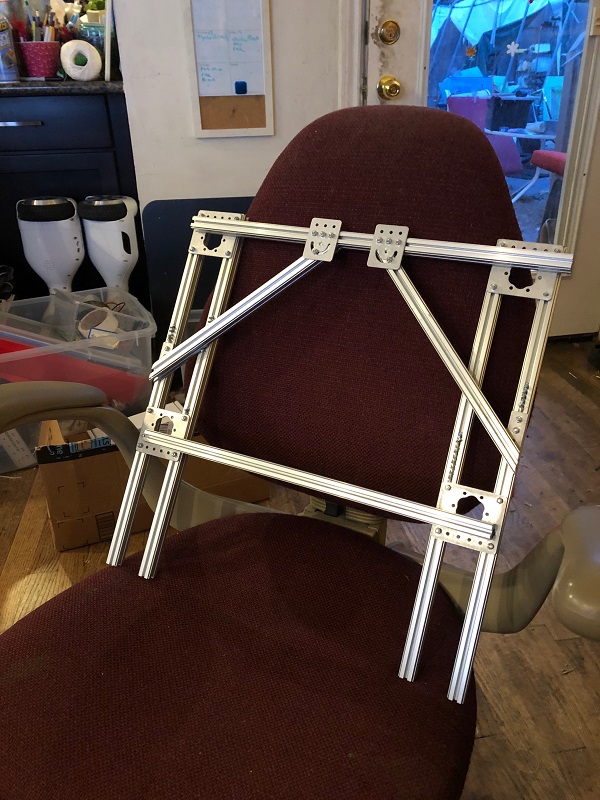




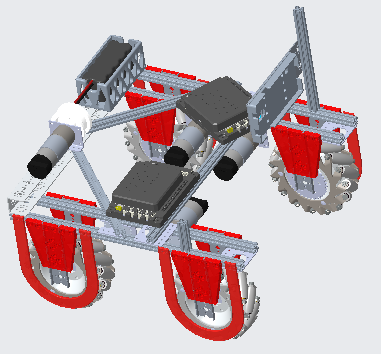
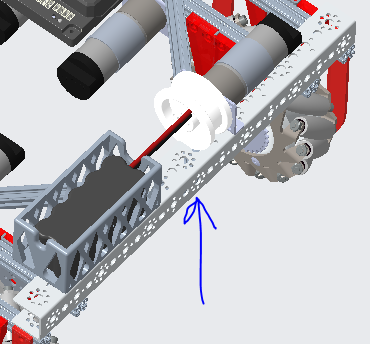
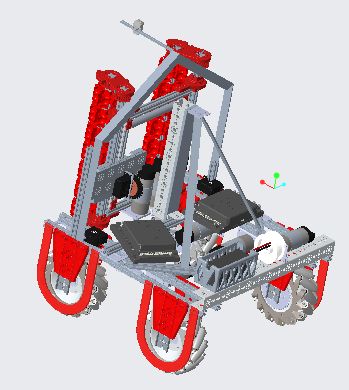
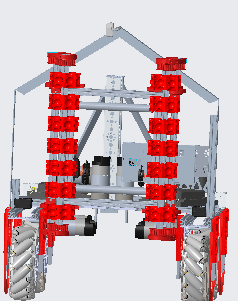
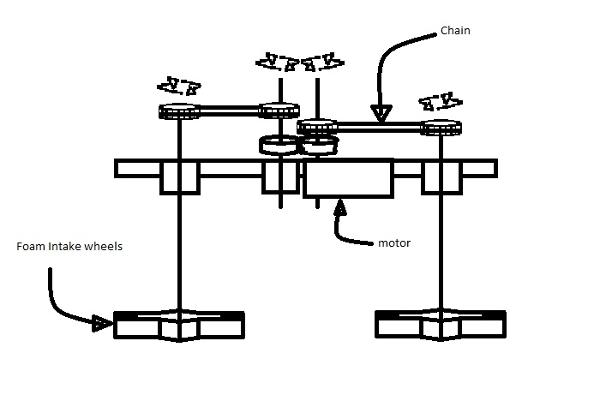

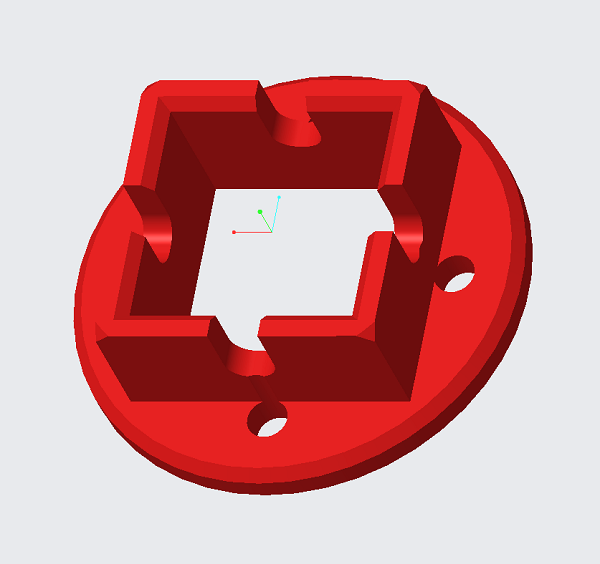
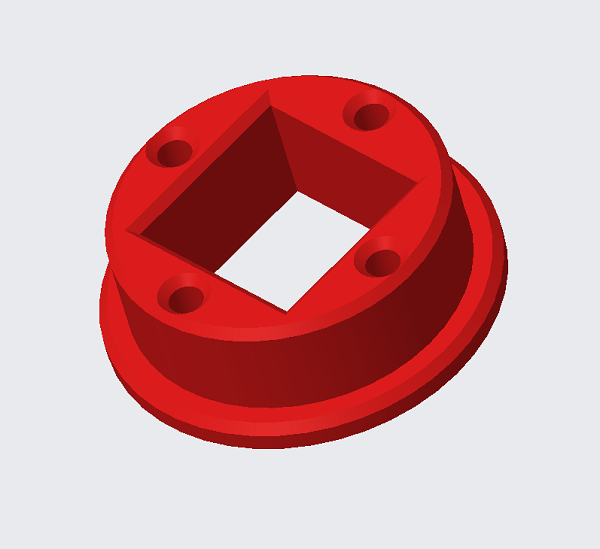
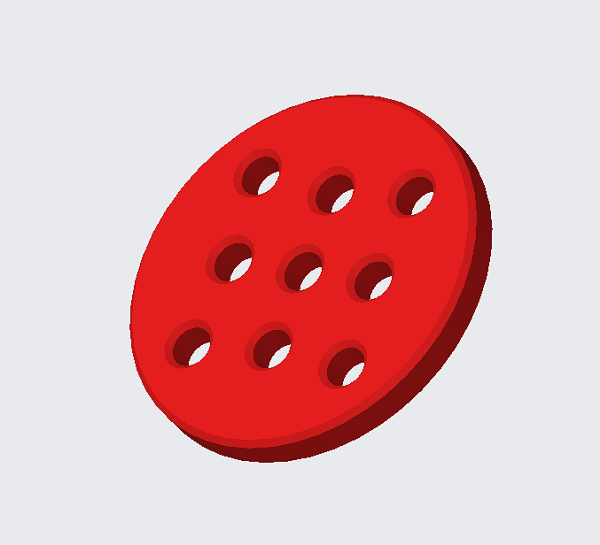
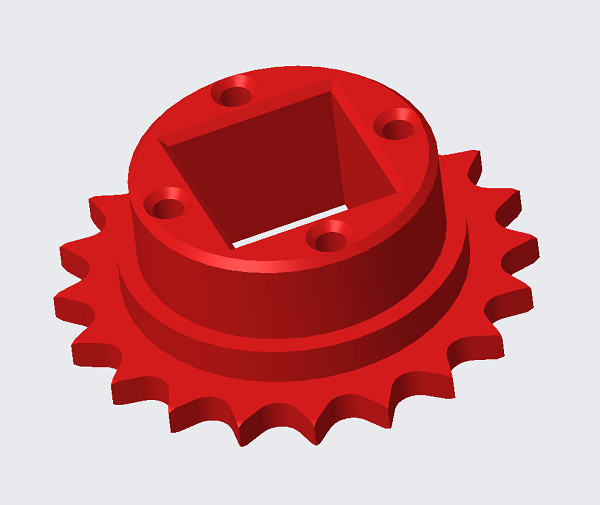







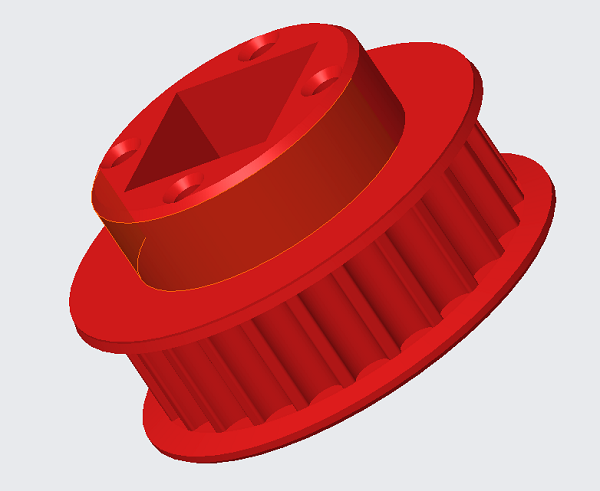


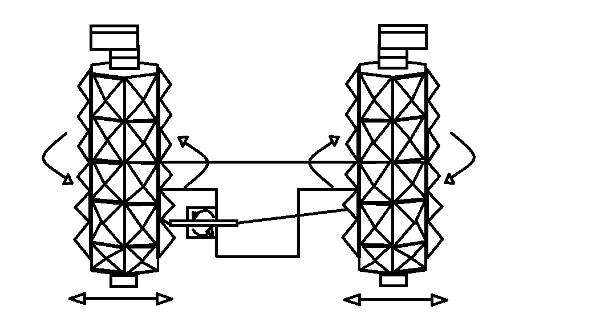
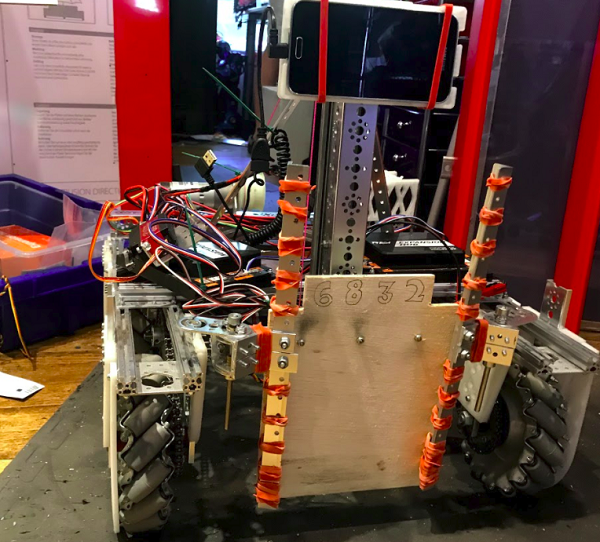

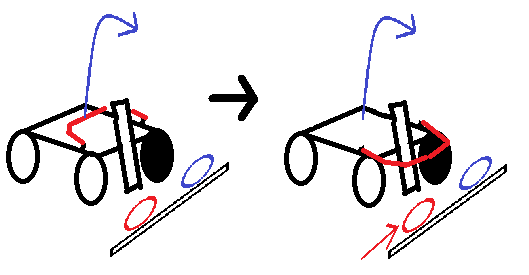
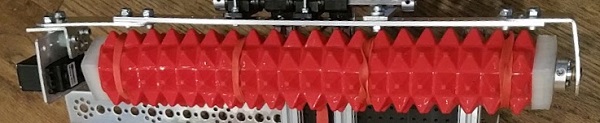





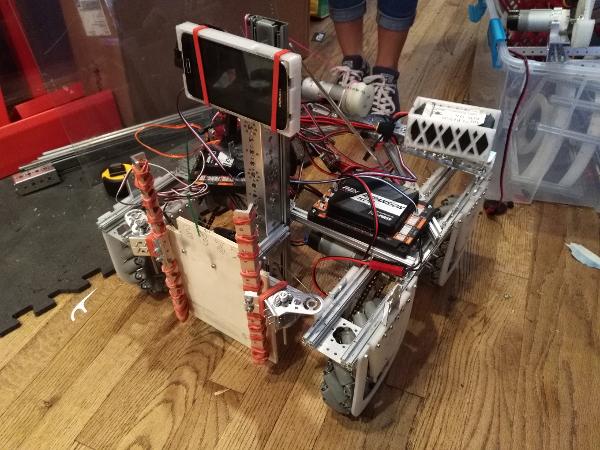

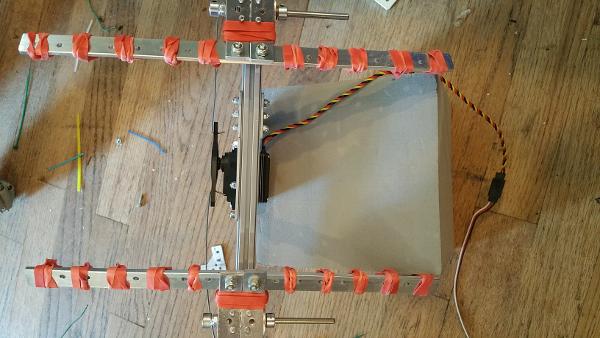
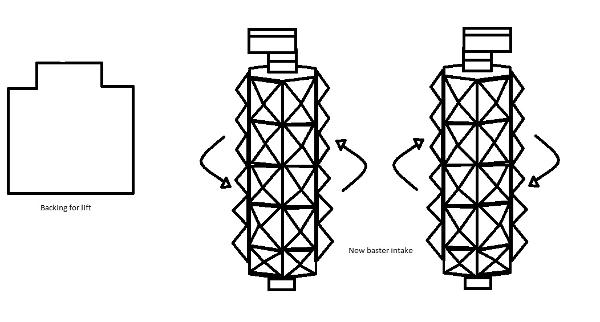




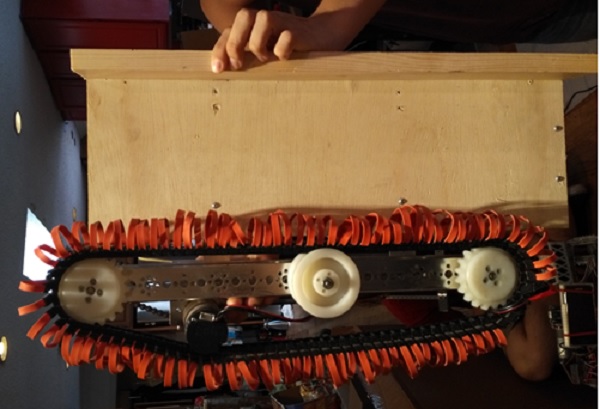
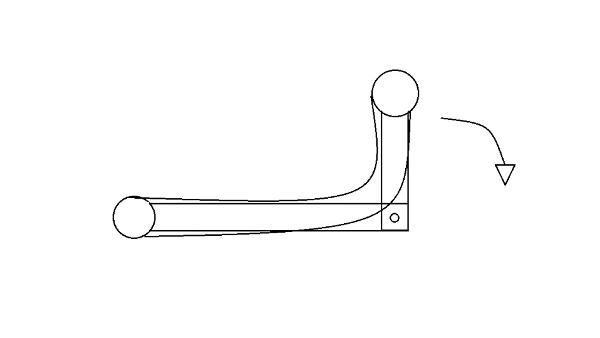






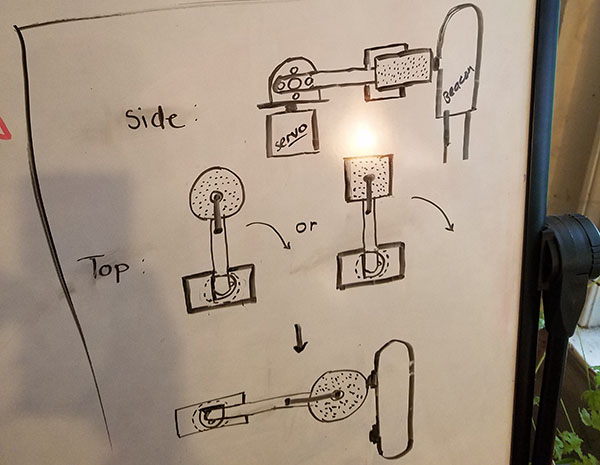

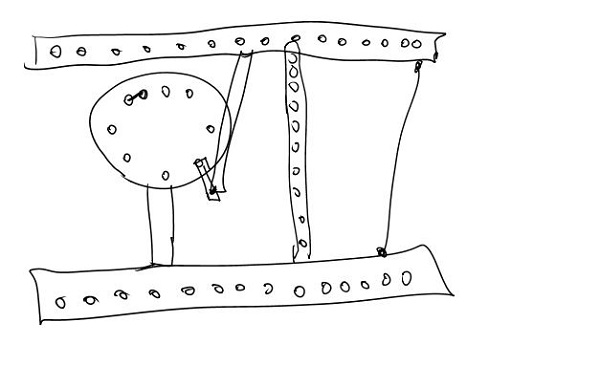

{kind=link}